四旋翼微型无人机在大比例地形图中的应用
2018-10-15孙治华
孙治华
(吉林省摄维测绘有限公司,吉林 长春 130012)
近年来快速发展起来的无人机测绘是将无人机技术运用于测绘领域而产生的新方向,是新型测绘技术与航空平台技术、信息技术的高度集成,是对传统卫星遥感测绘和有人机航空测绘的有效补充。无人机测绘具有结构简单、操纵灵活、使用成本低、反应快速的特点,可以灵活、快速地获取到高分辨率、大比例尺和高现势性的影像[1]。目前,测绘行业使用的无人机主要分为固定翼和多旋翼两种,两者各有优缺点。固定翼无人机有飞行速度快、单架次飞行作业面积大等优点,但对飞机起降场地有一定要求,并且不能在空中旋停,转弯面积大,不利于小面积作业[2]。多旋翼无人机起降则比较简单,没有特殊的场地要求,可以在空中旋停,作业灵活,但它的作业时间短,抗风能力差,作业效率相对要低。总的来说,多旋翼无人机是对传统的有人机和固定翼无人机的一种补充[3]。本文以测量吉林省松原灌区大安片的一处带状形渣土场为例,阐述多旋翼无人机在本项目中从获取影像到内业解算、输出1∶1000地形图、精度分析等过程的实施过程。
1 项目概况与无人机平台
1.1 项目概况
松原灌区涉及松原、白城、前郭、乾安、大安等,根据各片区所处的地理位置,将灌区分为前郭片、乾安片,大安片三部分。本项目所处在大安片区,本片区内多为平原地区,地势平坦、通信畅通;植被多为草地,有极少部分的旱地和水田。由于施工图阶段土料场和弃土场发生变化,需要对已实施的土料场和弃土场进行测绘。本文以一处带状渣土场测区进行内容阐述,此测区全长约18km,宽约200m,中间是一条人工渠,两边堆有从渠中挖出的渣土,植被主要是草地。
1.2 无人机平台
本次作业采用的无人机平台为大疆精灵4Pro四旋翼无人机。起飞重量:1388g,飞行速度:小于10m/s,相机等效焦距:24mm,照片分辨率:5472×3648像素,重叠度:大于80%,相对航高:200m,地面分辨率:5cm,显示设备:平板电脑,飞行控制APP∶DJI GO 4和Pix4Dcapture[4]。
2 无人机航测作业流程
2.1 实地勘察和布设像控点
作业人员对作业区域和周围进行实地勘察,采集地形地貌、植被等信息,查看飞行区域内有无对飞行产生影响的高大建筑物或地貌等,为场地的选取、航线规划等提供资料。
由于所采用的无人机平台没有准确的RTK差分POS数据且测区呈带状分布,所以为提高成图精度,需要在测区内均匀布设地面控制点[5]。本次作业像控点布设在测区两侧,约每500m一对,平面采用1980西安坐标系统,中央经线123°,高程采用1985国家高程基准,平面及高程精度为2cm。
2.2 航线规划
在现场组装好无人机后,打开航线规划APP∶Pix4Dcapture,如图1所示。航线规划要针对任务性质和任务面积,综合考虑天气和地形等因素,规划如何实现任务要求的技术指标,实现基于安全飞行条件下的任务范围最大覆盖。由于本次作业测区较大,无人机单次作业面积有限,所以采用分段航线规划,分段航摄作业,单架次飞行大约为200m宽、1.5km长。为延长无人机有效作业时间,返航点要与航摄作业的起终点在同一侧,航线数规划为双数,图1中的点为像控点,要保证像控点在航摄区域内[6]。
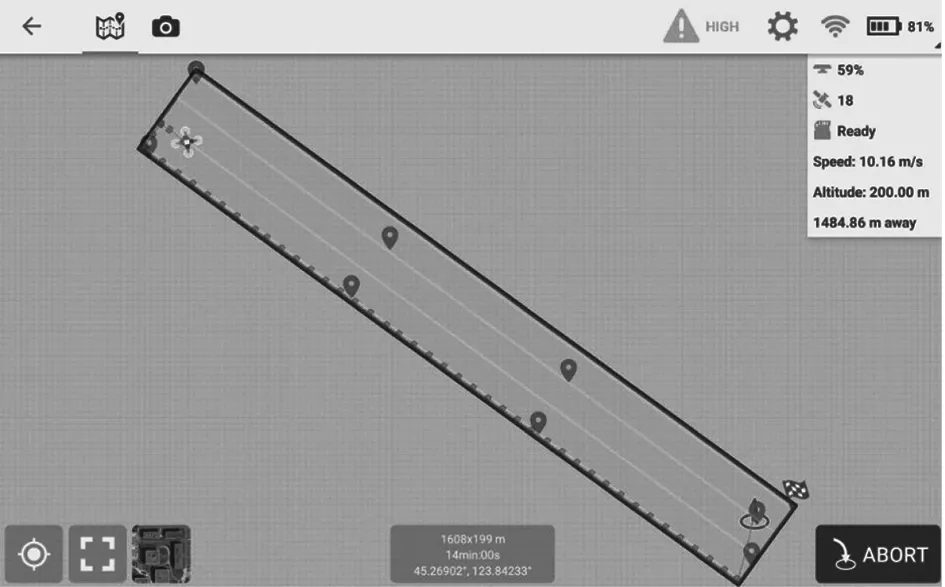
图1 航线规划图
2.3 航摄作业
当航线规划完成后,设置其它作业参数,作业返航高度为300m,作业高度为200m,重叠度为80%,然后将飞行计划上传至无人机,就可以开始进行飞行拍摄了。飞行过程中实时监测飞行器的高度、速度、电量、飞行拍摄轨迹、温度、风速等。
当遇到不正常情况时,地面人员要做出相应的操控,使得飞行器正常工作。如有不可操控的紧急情况时进行一键返航操作。具体飞行过程如下:
(1)起飞:在飞行计划上传完成时,无人机会从反航点自动垂直上升至返航高度,然后平移至起点位置,再下降至作业高度。
(2)航线飞行:无人机到达作业起点位置和高度后,会按规划的航线进行飞行定时拍摄。在一条航线的末端,无人机会90°转向移至下一条航线,再90°转向进行飞行拍摄。
(3)回收:无人机到达作业终点后,会从作业终点垂直上升至返航高度,然后平移至返航点,再垂直下降至地面。
(4)航摄质量检查:在完成航摄作业后,要在现场对作业数据进行检查。检查所拍照片数量与飞行轨迹是否与规划航线一至;检查有无拍摄效果不好的照片,有无遮挡像控点的照片。如果存在质量问题,要进行重飞或补飞,如果质量合格则外业航摄结束。
2.4 数据解算
内业数据解算使用Pix4Dmaper软件,分为新建作业、概略刺点、全面刺点、初始化处理、输出成果5步。
(1)新建作业:将外业质量检查后的照片导入到软件,设置图像的输入地理位置坐标系为WGS84,相机参数按图2设置,选择输出坐标系为:西安1980坐标系3度分带的41号带,处理模板选择3D地图。
(2)概略刺点:由于本次作业中的像控点多达64个,如果直接全面刺点的话,工作量会很大,所以先进行概略刺点,软件会进行自动计算匹配,再进行全面刺点的,工作量就会大大减少。在GCP/MTP管理器中导入控制点,分别在测区的首尾和中间地段各选择一个像控点,每个像控点选刺3张照片,再进行初始化处理的快速检测[7]。
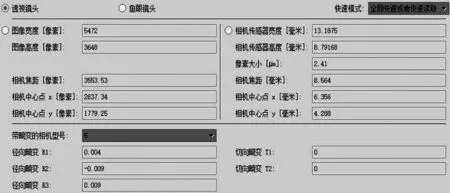
图2 相机参数设置图

表2 相机自检校误差表
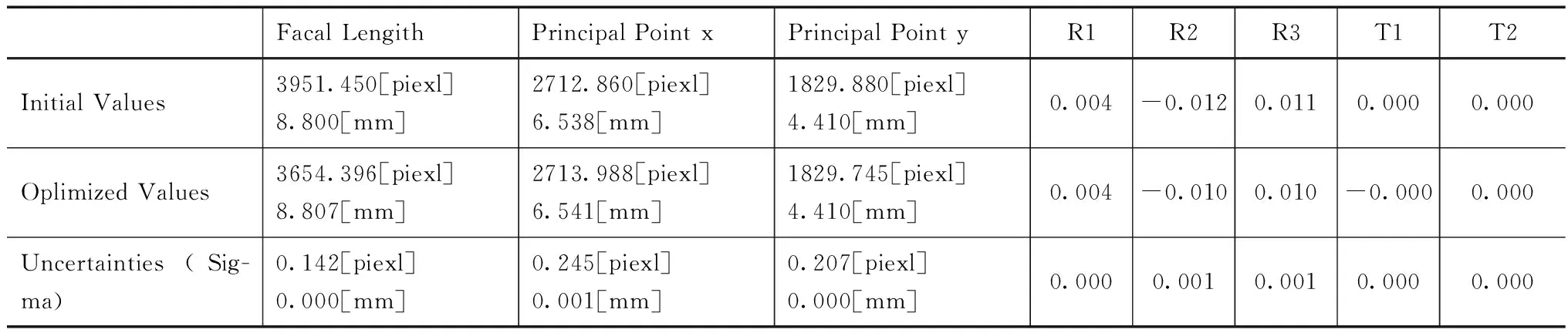
Facal LengithPrincipal Point xPrincipal Point yR1R2R3T1T2Initial Values3951.450[piexl]8.800[mm]2712.860[piexl]6.538[mm]1829.880[piexl]4.410[mm]0.004-0.0120.0110.0000.000Oplimized Values3654.396[piexl]8.807[mm]2713.988[piexl]6.541[mm]1829.745[piexl]4.410[mm]0.004-0.0100.010-0.0000.000Uncertainties(Sig-ma)0.142[piexl]0.000[mm]0.245[piexl]0.001[mm]0.207[piexl]0.000[mm]0.0000.0010.0010.0000.000
(3)全面刺点:概略刺点完成后,打开手动连接点编辑器,对包含像控点的照片依次刺刺点,因为已经过概略刺点的匹配,所以每张照片的刺点位置只要微调就可以了,全面刺点完成后,保存即可。
(4)初始化处理:采用全面高精度处理,完成后会自动输出质量报告,在质量报告中重点查看区域网空三误差与相机自检误差[8]。
区域网空三误差见表1,Mean Reprojection Error就是空三中误差,以像素为单位。
相机自检校误差的上下两个参数一般不能超过5%,R1,R2,R3,三个参数不能大于1,否则可能出现严重的扭曲,见表2。
(5)输出成果:输出的成果包含了DOM和DEM,在输出成果前要设置分辨率参数为10cm/像素。
2.5 制作地形图
制作地形图使用清华山维的EPS软件,主要分为DSM生成、立体采集、成果输出。
(1)DSM生成:清华山维的三维采集模块需要DOM与DSM一起使用,所以要先使用EPS将DOM和DEM合成一套ESM,为立体采集时所用[9]。
(2)立体采集:打开EPS的三维模块,加载对应的EOM和DSM,就可以进行地形图的立体采集了。
(3)成果输出:将DLG打印为纸图,准备外业调绘和检查。
2.6 外业调绘、补测与检查
(1)以编绘的底图为外业工作图,利用RTK,在实地与工作图进行对比调绘,调绘的一般要求有:判读准确、描绘清楚、符号使用恰当、位置准确无误等。
(2)补测的重点内容有:内业确定的疑问区、高植被区、水域、影像模糊区、新增地物等,这些区域要重新实测[10]。
(3)检查以测断面和地物的方式进行,每间隔100m测量一条断面,以验证高程精度;测量地物,以验证平面精度。
3 精度分析
本项目全测区共2.97km2,实测断面点和地物点共3714个,将其与所采集的DLG线划图对比,得出平面中误差为0.32m,高程中误差为0.18m。参考GBT 17278- 2009《数字地形图产品基本要求》中的1∶500~1∶2000地形图平面精度中误差在平地、丘陵地不大于图上0.6mm,高程注记点中误差在平地不大于0.2m的要求,所以本次使用大疆精灵4Pro四旋翼微型无人机航测成图项目完全符合1∶1000地形图精度要求。
4 结语
无人机测量平台以其结构简单、操纵灵活、低成本、反应速度快等优点,在专业测绘领域得到了迅猛的发展,而多旋翼无人机在小面积测图和特殊飞行环境下,有其自身的优点。随着旋翼无人机的载重量和相机等硬件发展以及低空雷达在测绘方面的应用,相信今后,无人机测绘的平面和高程精度会有很大的提高,从而也会得到更广泛的应用。
