基于优化MPPT算法的光储能量管理系统的研究
2018-10-15罗冰洋
方 曼,罗冰洋
(武汉理工大学 自动化学院,湖北 武汉 430070)
随着化石能源的日益枯竭,作为可再生的光伏太阳能发电应用越来越广泛[1-2]。在小电网系统中太阳能发电量的波动对系统电压稳定影响巨大,因此加入储能系统以稳定电网系统电压(简称光储系统)。考虑到负载波动和太阳能发电量波动对小电网系统的影响都很大,因此在含有光储系统的小电网系统中,研究在发电量和负载波动下的能量管理控制策略以维持整个系统的电压稳定十分必要。作为维持光储系统母线电压稳定的核心部分,能量管理系统根据光伏电池发电与蓄电池工作状态,控制光伏发电与蓄电池的工作模式,从而使供电系统电压稳定运行并快速响应系统的各种状态。人们对光储能量管理系统的研究已有很长的历史,提出了很多的能量管理控制策略。文献[3]以LabVIEW为软件基础,提出根据光伏输出功率、负载功率与储能电池电压状态以设定光储系统工作模式,但是该系统并没有仿真出光储系统在各个模式间切换下母线电压的变化,且负载电流后期震荡较大。文献[4]以LabVIEW为软件开发平台,开发设计了光储控制系统,完成了系统在各个工作模式下的自由切换仿真,但是该仿真不能准确反映系统在模式切换下的状态,难以仿真出光储系统在模式切换情况下的系统稳定性。
笔者根据独立光伏系统特性,以 LabVIEW为软件开发平台,与Starsim电磁暂态仿真软件相结合,开发设计了光伏储能控制系统。通过连续运行测试,结果表明系统在各种工作模式下能够自由切换,证明了所提出的能量管理控制策略的可行性和有效性。
1 光储能量管理系统整体构架
独立式光储系统基本结构,包括光伏阵列、蓄电池组、MPPT(maximum power point tracking)控制器、系统模式控制部分、DC/DC变换器和直流负载等[5],如图1所示。
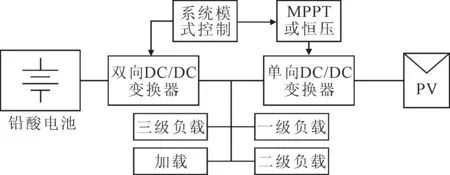
图1 独立式光伏储能系统结构图
1.1 变扰动步长MPPT算法
为使太阳能电池保持最大能量输出,MPPT控制是其必不可少且最重要的控制部分。扰动观察法是光伏储能系统中应用最广泛的一种MPPT控制算法,它的具体步骤为:对光伏阵列的工作点施加一定的扰动,然后判断光伏阵列输出功率的变化。如果输出功率增大,则扰动方向将保持不变继续扰动;如果输出功率减小,则反向扰动[6]。扰动观察法具有算法简单,精度高,效应快,且容易实现等优点,但是在稳定工作状态下MPPT会导致系统额外能量损耗[7-8]。特别是在定步长情况下,MPPT能量损耗与步长成反比。为降低MPPT导致的额外能量损耗,笔者采用变扰动步长观察法以降低能量损耗,并兼顾跟踪速率和稳态震荡大小。
变扰动步长MPPT算法流程如图2所示。Uk、Ik、Pk分别为本次太阳能电池输出电压、电流和功率,Uk-1、Pk-1分别为上一次太阳能电池输出电压和功率。ΔUk、ΔPk分别为本次扰动电压和扰动功率,ΔPk-1为上一次扰动功率,并且有ΔUk=Uk-Uk-1,ΔPk=Pk-Pk-1。变步长扰动MPPT算法通过计算k=ΔPk/ΔPk-1来改变下一次扰动的步长。下一次扰动电压步长设定为ΔUk+1=k×ΔUk。变扰动步长MPPT算法原理是:在MPPT寻优过程中,当ΔP幅值不断减小时,ΔU也不断减小,在最大功率跟踪点附近,ΔU趋近于0,从而达到最大功率点跟踪的目的。
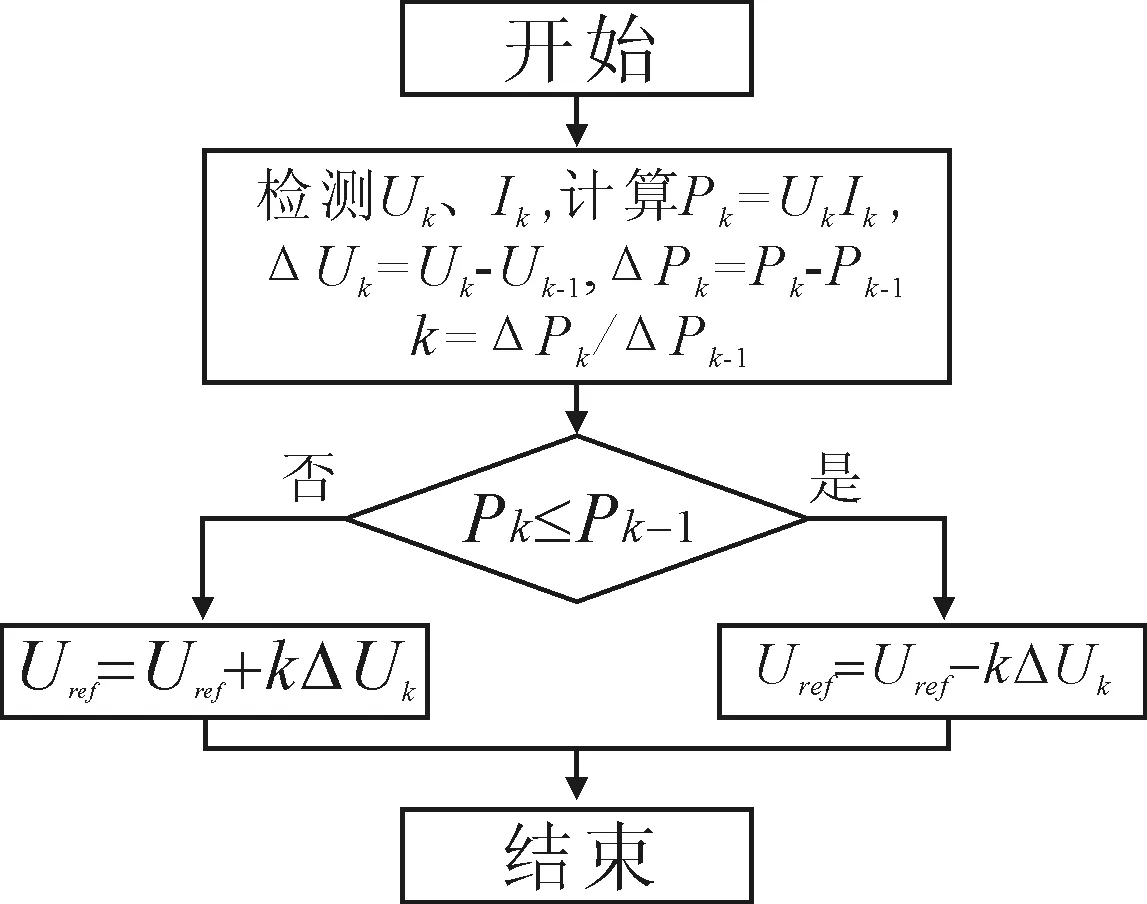
图2 变步长扰动观察算法流程图
1.2 光储能量管理控制策略
光储能量综合管理控制系统包括太阳能电池、蓄电池、单向DC/DC变换器和双向DC/DC变换器,如图3所示。连接光伏电池的单向DC/DC变换器包括MPPT控制和恒压控制。连接蓄电池的Buck-Boost双向DC/DC变换器可以根据实际需要控制能量流动。
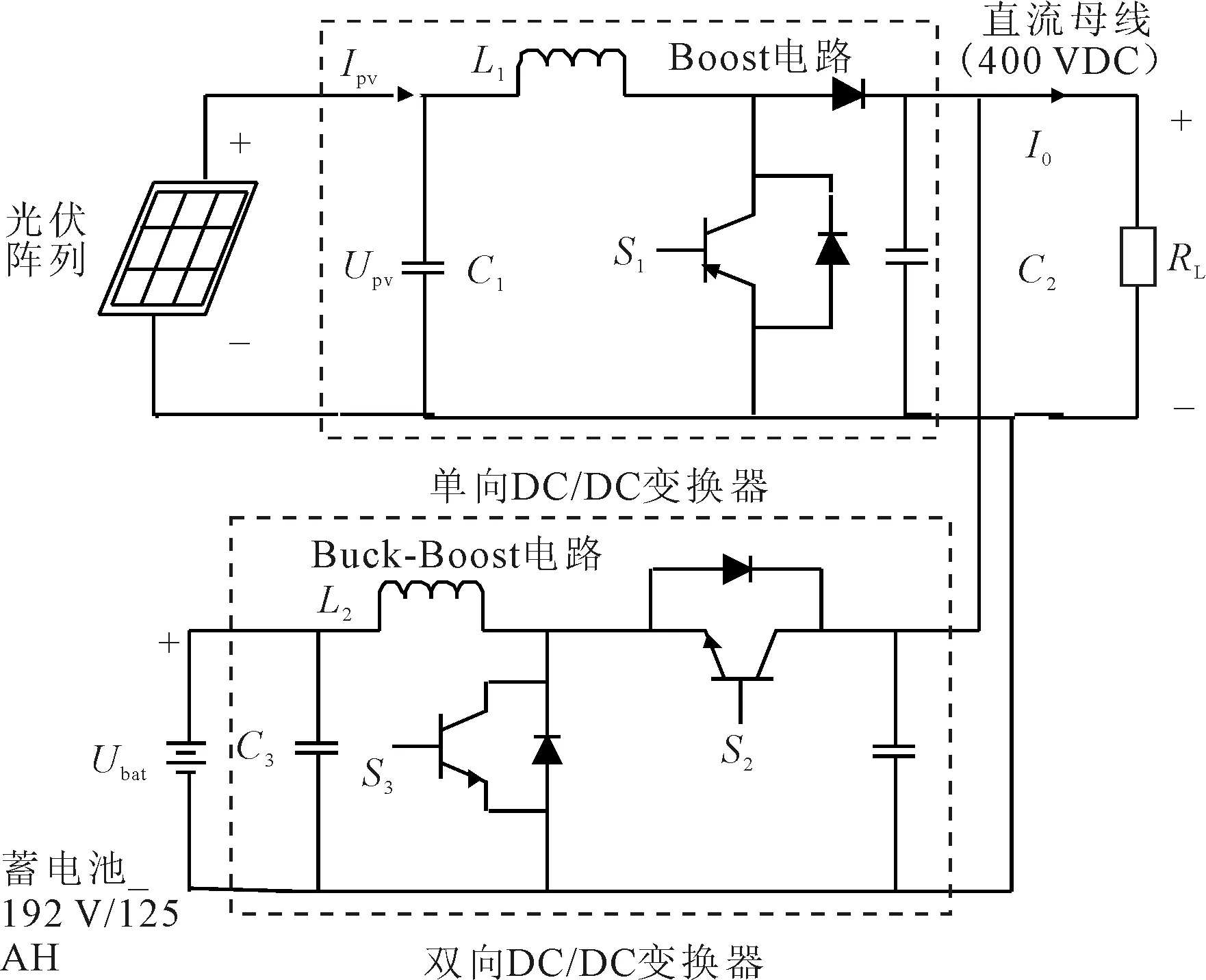
图3 光储能量综合管理控制系统
系统针对15 kW的额定负荷功率进行设计,配置额定功率为30 kW的光伏电池。同时,为使系统能在蓄电池单独供电的状况下维持24 h的稳定运行,配置蓄电池容量为C=1 875 Ah、192 V。蓄电池正常电压范围为160~220 V。根据蓄电池的荷电量C=1 875 Ah,选取充电电流限幅值为Ilim=0.133×C=250 A,因此充电功率为Pb=Ub×Ilim=192×250=48 kW。
光伏储能系统有5种工作模式,如表1所示。
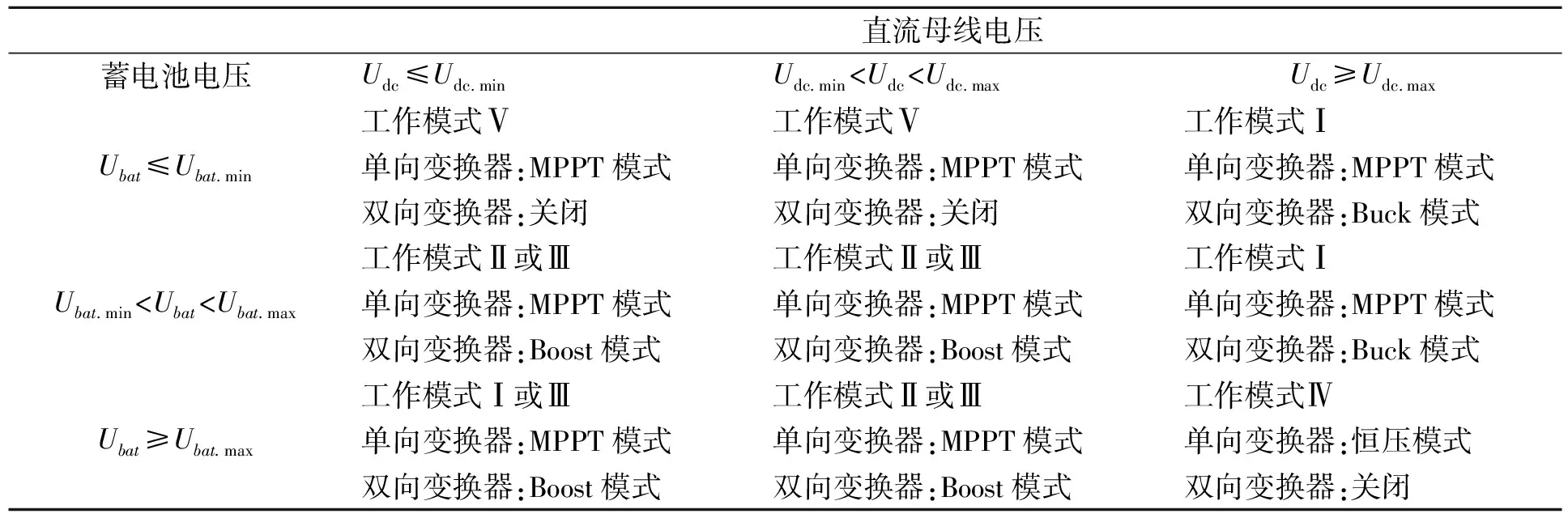
表1 系统的工作模式
(1)工作模式Ⅰ。光伏阵列正常工作,若光伏阵列输出功率大于负荷所需功率时,单向变换器工作在MPPT模式。蓄电池吸收电能,双向变换器工作在Buck模式,双向DC/DC变换器能量从母线向蓄电池流动。蓄电池吸收的功率为光伏输出功率减去负载的多余部分;
(2)工作模式Ⅱ。光伏阵列正常工作,若光伏阵列不足以提供负荷所需能量,单向变换器工作在MPPT模式,双向变换器工作在Boost模式。双向变换器控制能量由蓄电池向母线流动,蓄电池放电;
(3)工作模式Ⅲ。光伏阵列处于关闭状态,仅有蓄电池给负载供电,双向变换器工作在Boost模式,系统负荷功率完全由蓄电池组供给;
(4)工作模式Ⅳ。蓄电池处于过充状态(Uhat>220 V)时,双向DC/DC变换器将会停止工作。母线电压完全由光伏电池供电,此时单向变换器处于恒压模式,以维护母线电压恒定;
(5)工作模式Ⅴ。蓄电池处于过放状态(Uhat<160 V)时,为了保护蓄电池,双向变换器将会停止工作,单向变换器工作在MPPT状态,负载完全由光伏电池供电。由于光伏阵列不能完全供给系统负荷,为维持母线电压稳定,系统将切掉非关键负荷以保证关键负荷供电。系统将所有负荷分为3类:一级负荷、二级负荷和三级负荷(各5 kW)。当光伏阵列不能够完全供给15 kW的负荷时,系统切掉三级负荷;当光伏阵列不能够完全供给10 kW负荷时,系统切掉二、三级负荷;若光照强度过低,光伏阵列产生电压不足以维持5 kW的关键负荷时,光伏阵列关闭,此时整个系统关闭。
2 LABVIEW仿真模型建立及结果分析
根据所采用的光储能量管理系统的拓扑结构,搭建仿真电路模型。在仿真中为简化分析,将本地负荷均用电阻负载代替。仿真系统中的其他参数如表2所示。其中MPPT初始扰动步长为0.3 V,扰动间隔时间为0.05 s。
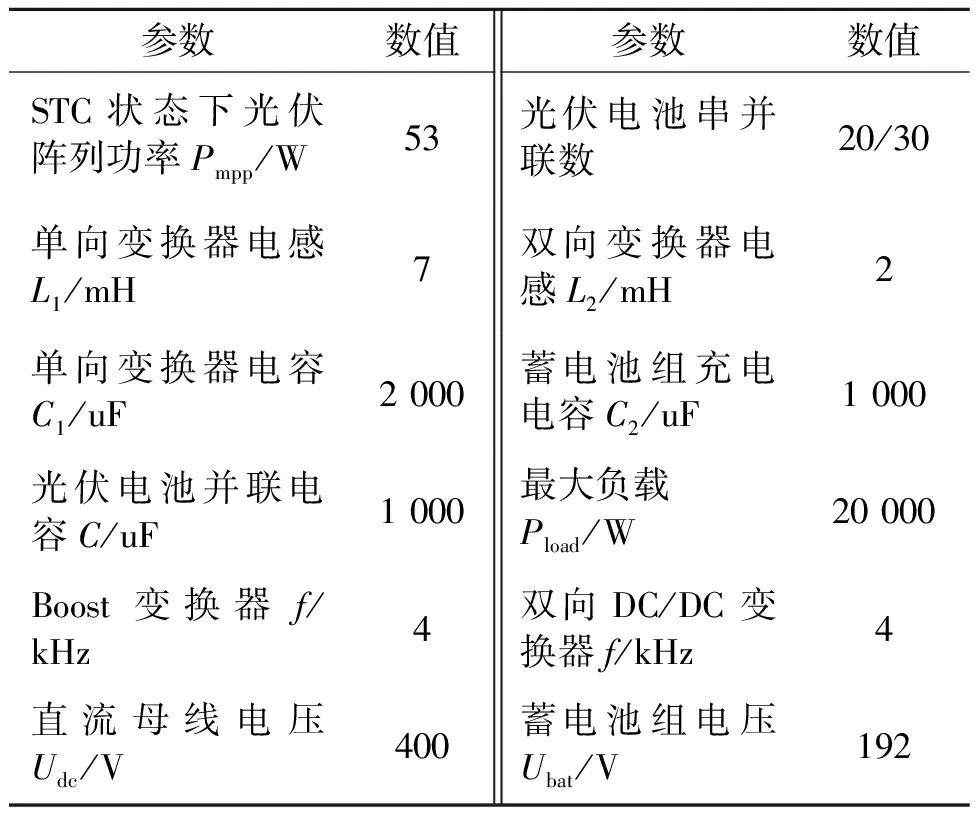
表2 独立光伏发电系统的仿真参数
2.1 变扰动步长MPPT控制LabVIEW模型及仿真结果
为验证笔者所提出变扰动步长MPPT控制的有效性,将用两组定扰动步长的MPPT控制做对比实验。采用扰动观察法进行验证时,两组定扰动步长MPPT算法的步长分别选定为0.3和0.03,光照强度为1 000 W/m2,其仿真结果如图4所示。仿真结果表明步长为0.3和0.03的情况下,系统稳定时间均约为0.1 s,而步长为0.3时的稳定时间要稍短于步长为0.03的稳定时间。而步长为0.3时功率跟踪时震荡幅度更大。笔者所提出的变扰动步长MPPT算法仿真波形如图5所示(光照强度为1 000 W/m2)。仿真结果表明,变扰动步长MPPT算法能够快速追踪光伏电池的输出功率,稳定时间约为0.02 s,大大低于定扰动步长MPPT算法。而且变扰动步长的MPPT算法跟踪的震动幅度小,远低于定扰动步长MPPT算法的震荡幅值。
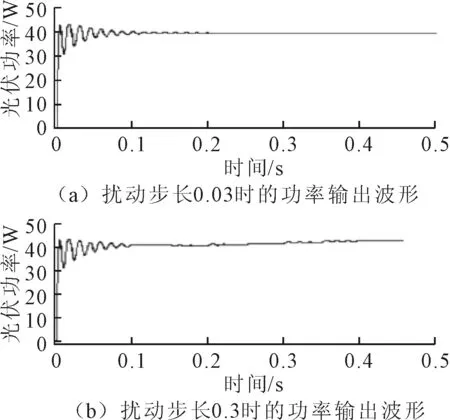
图4 定扰动步长的功率输出波形
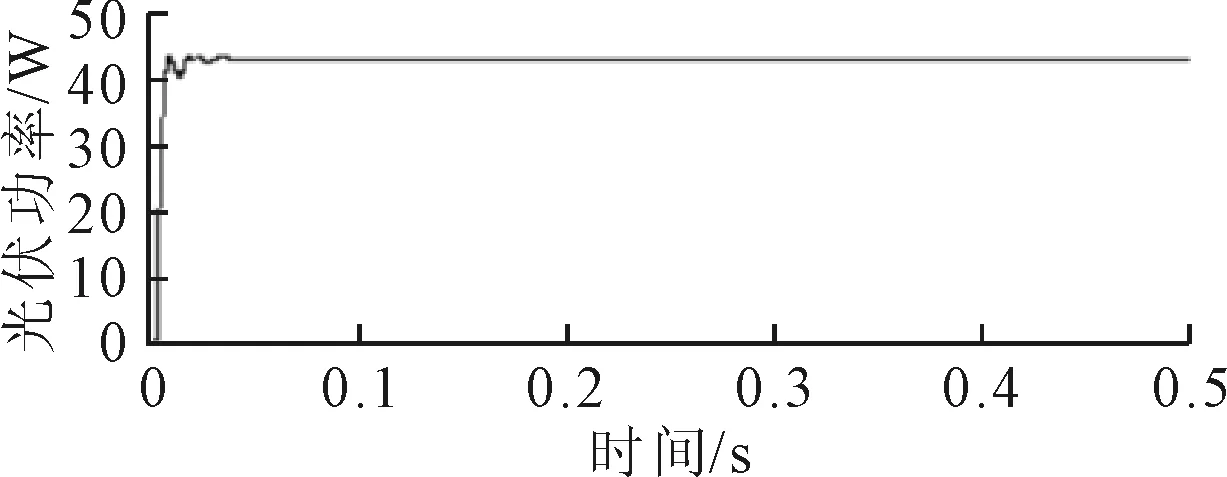
图5 变扰动步长的功率输出波形
采用步长为0.3,仿真时间为0.5 s,扰动间隔0.05 s。仿真中光伏阵列模块在0.3 s左右由太阳辐照度为1 000 W/m2后突变为800 W/m2,仿真结果如图6(b)所示,图6(a)为传统扰动观察法下,相同仿真条件得到的功率输出波形。从图6中不难看出,通过对扰动观察法的改进使得初始步长较大时启动时的功率波动明显减弱,当外部条件变化时有效保证了动态跟踪性能,系统响应速率保持在0.015 s左右,并且减少了稳态损耗,当光伏工作点跟踪到MPPT工作点时,MPPT附近的功率波动减弱,提高了系统效率。因此,采用本文的改进算法,在步长较大时,依然可以保证其原有的跟踪速率,并且能有效减小稳态震荡。通过仿真数据表明,改进的扰动观察法具有以下优点:①降低系统启动时的功率波动;②在外部条件变化时保证动态跟踪性能;③减小MPPT点附近的功率波动,提高系统效率。
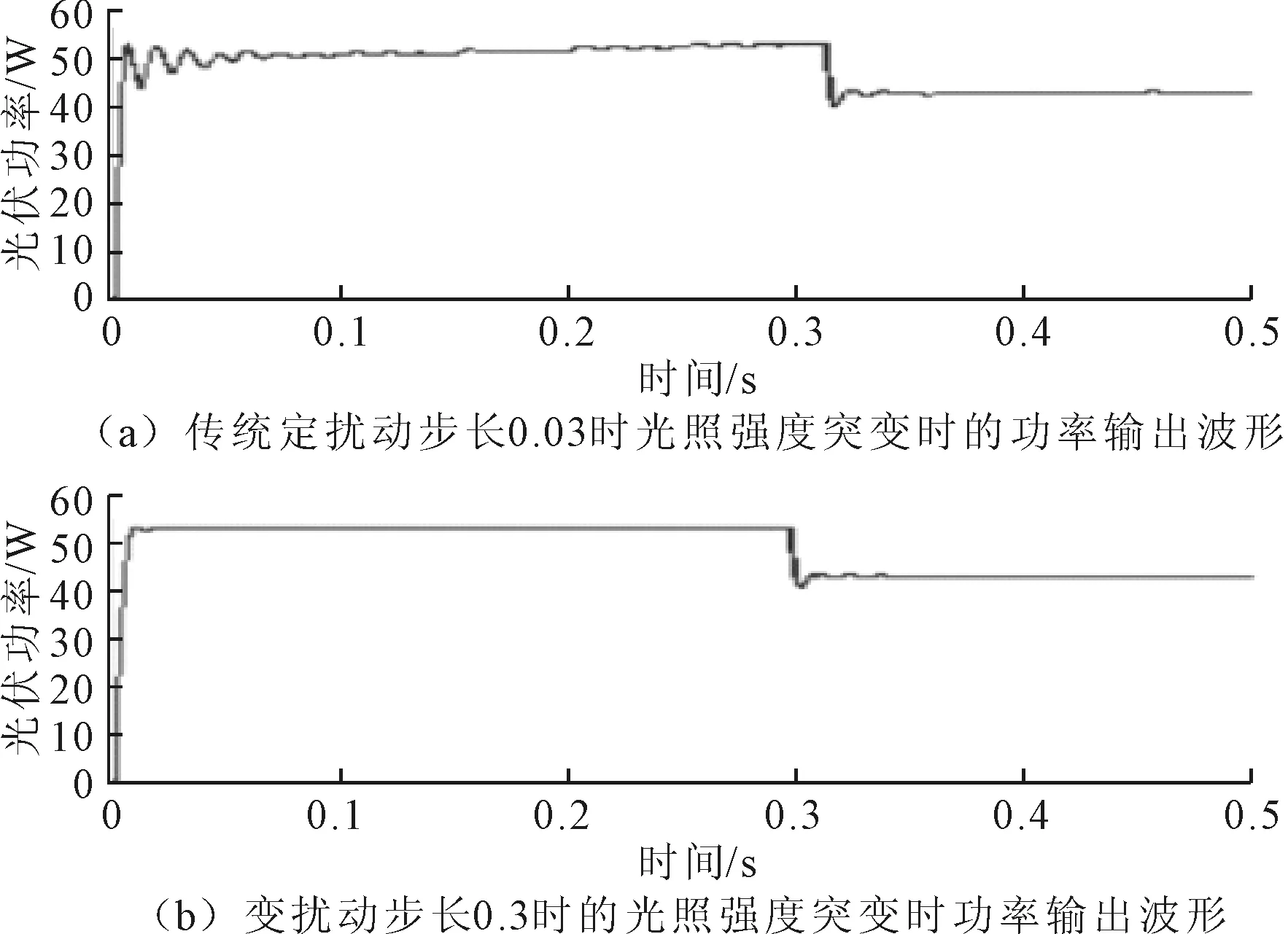
图6 功率输出波形
2.2 基于LabVIEW光储能量管理系统建模
Starsim光储系统主电路如图7所示。从左到右依次为光伏电池、单向DC/DC变换器、直流负载(一级负荷、二级负荷、三级负荷、加载负荷)、双向DC/DC变换器和储能电池。
3 能量管理系统仿真分析
3.1 模式内切换仿真
3.1.1 蓄电池组处于充电工作模式
图8给出了蓄电池组处于充电状态(模式I)下蓄电池的仿真波形。在t=2 s时,光照强度由标准光照强度1 000 W/m2变为700 W/m2,在t=4 s时光照强度又变为9 00 W/m2。在t=6 s时,负载由15 kW变为20 kW。
从图8可以看出,此时光伏阵列处于MPPT模式,蓄电池组电流为负,蓄电池组处于充电状态。当光照强度发生变化时,直流母线电压一直保持在系统母线正常电压范围内,直流母线电压稳定。当系统光照强度减弱时,此时光伏输出功率降低,负荷功率几乎不变,蓄电池组充电功率下降,蓄电池组充电功率等于光伏阵列输出功率与负荷功率之差。蓄电池组的端电压随着充电电流的降低而下降。当系统加载时,充电功率降低以维持母线电压。此时系统在负载或光照发生变化时,通过增大或者减小对蓄电池组的充电电流来维持整个直流母线的电压稳定在400 V,保持整个系统内的能量平衡。
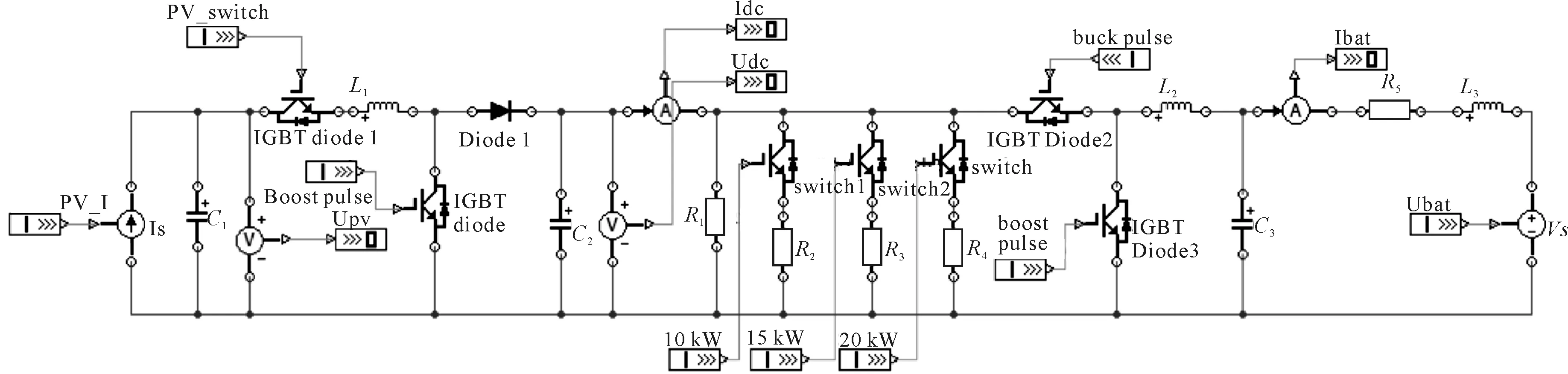
图7 Starsim光储系统主电路
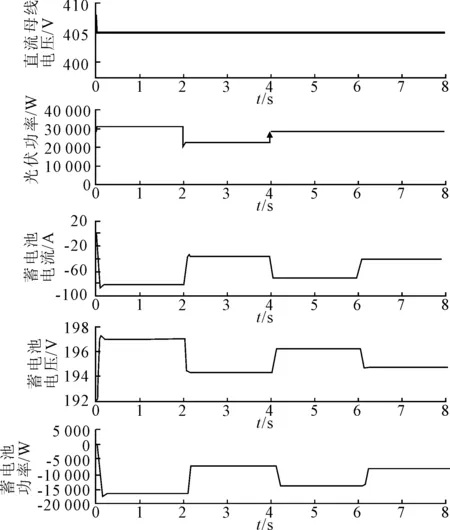
图8 蓄电池处于充电模式仿真波形
3.1.2 蓄电池组和光伏阵列同时供电
图9给出了独立光伏发电系统处于光伏阵列和蓄电池组共同供电(模式Ⅱ)时的仿真波形。在t=2 s时,光照强度由500 W/m2变为200 W/m2,在t=4 s时,光照强度变为200 W/m2,在t=6 s时,负载由15 kW变为20 kW。

图9 蓄电池组和光伏阵列同时供电仿真波形
从图9可以看出,在该工作条件下,蓄电池组的电流为正,此时蓄电池组处于放电状态,蓄电池组的端电压随着蓄电池组的放电而略有下降。此时光伏阵列一直处于MPPT状态。在光照或者负载发生变化时通过调整蓄电池组的放电电流以调节放电功率来维持直流母线电压稳定在400 V左右,保持整个系统内的能量平衡。
3.1.3 蓄电池组单独供电工作模式
图10给出了蓄电池组单独给负载充电状态(模式Ⅲ)下的仿真波形。光照强度为0 W/m2。在t=4 s时,负载由15 kW变为20 kW。蓄电池组电流为正,蓄电池组处于放电状态。蓄电池组的端电压随着充电电流的增加而缓慢下降。
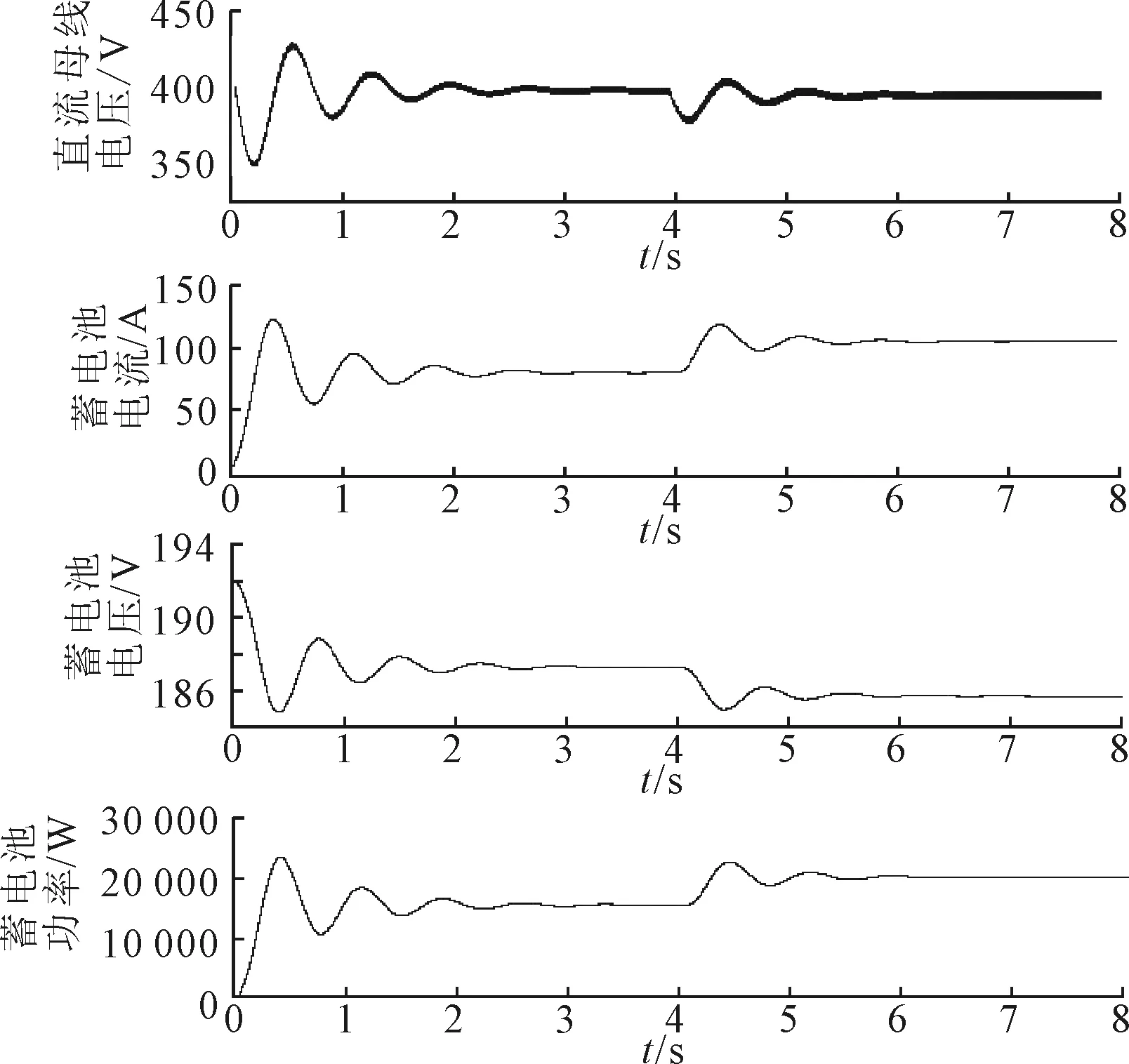
图10 蓄电池组处于单独供电工作模式仿真波形图
如图10所示,虽然当负荷变化较大时直流母线电压的初始波动较大,但是系统在负载发生变化时通过调整蓄电池组的放电电流以调节放电功率仍能最终维持直流母线电压稳定在400 V左右。
3.1.4 光伏阵列单独供电(恒压)工作模式
当蓄电池组过充时系统处于光伏阵列恒压工作模式(模式IV)时,光伏阵列P-V特性曲线有两个点与负载功率相对应,图11为光伏阵列恒压输出时的仿真图。在t=2 s时负载由15 kW变为20 kW,在t=4 s时光照强度由1 000 W/m2变为800 W/m2,在t=6 s时光照强度由800 W/m2变为900 W/m2。
从图11中可以看出,在光照或负载发生变化时,光伏阵列可以使直流母线电压稳定在400 V左右,维持整个系统的能量平衡。
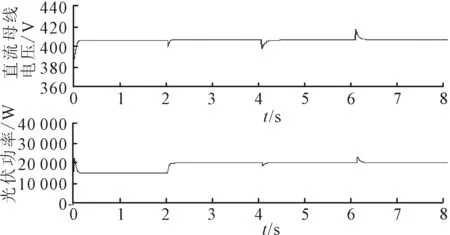
图11 光伏阵列单独供电(恒压)工作模式仿真波形
3.1.5 光伏阵列单独供电(MPPT)工作模式
图12给出了蓄电池组在过放的情况下光伏阵列在MPPT模式下独立给负载充电状态(模式V)下的仿真波形。此时光伏阵列输出功率不足以供给负载,因此系统只保留一级负荷与二级负荷的供电。假设一级负荷与二级负荷分别为5 kW。在t=2 s时光照强度由500 W/m2变为400 W/m2,在t=4 s时光照强度变为300 W/m2,在t=6 s时光照强度变为200 W/m2。
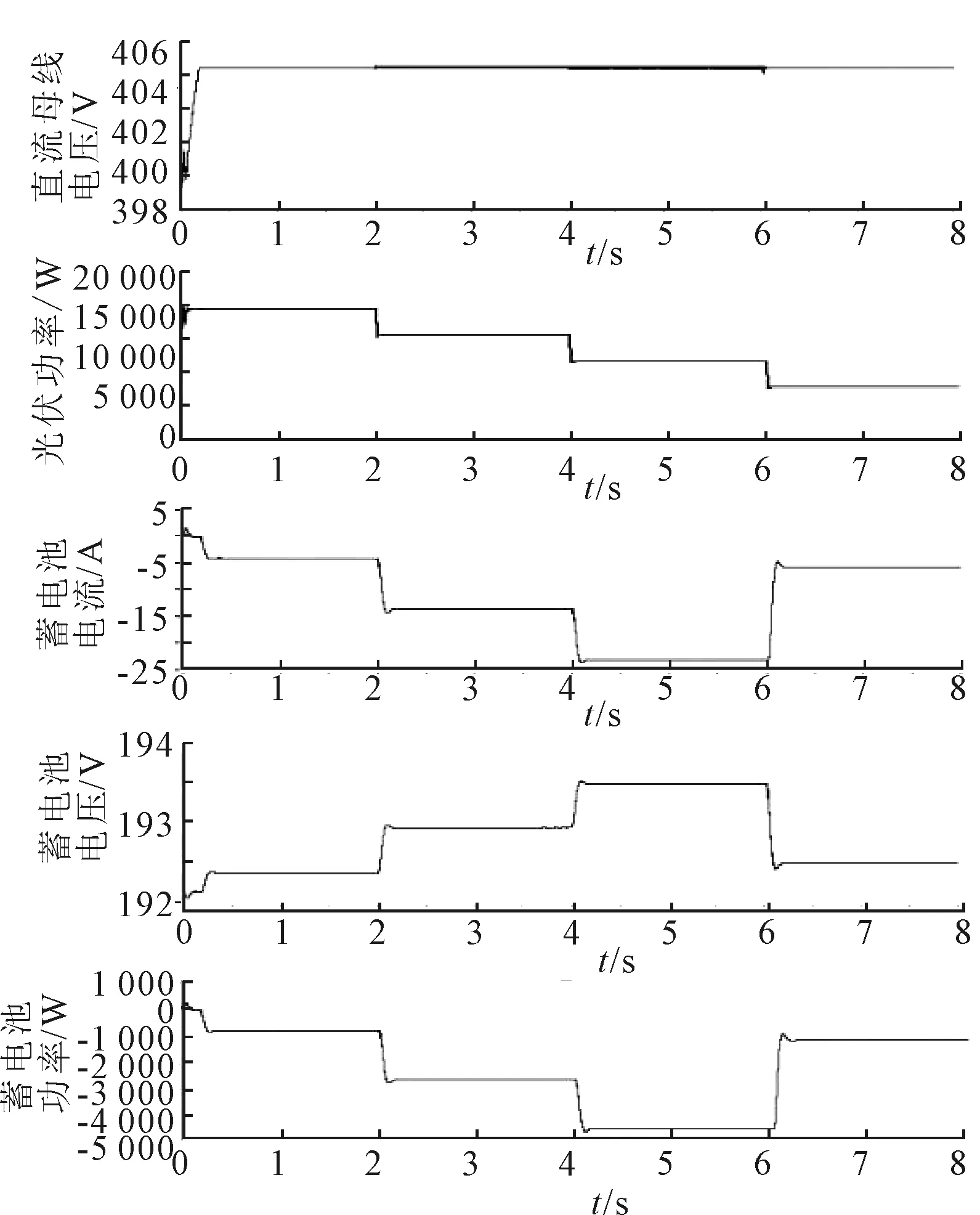
图12 光伏阵列单独供电(MPPT)工作模式仿真波形
当蓄电池组由于过放而无法放电时,光储能量管理系统为保证直流母线电压稳定,关键负荷能够正常工作;当光伏阵列输出功率不足以维持母线电压的供电时,系统将会自动切掉非关键负荷以维持流母线电压稳定在400 V,从而维持整个系统的能量平衡。当光照强度为500 W/m2时,蓄电池为充电状态,系统无需切负荷,系统负荷为15 kW;当光照强度为400 W/m2时,此时光伏阵列不能够完全供给15 kW的负荷,系统切掉三级负荷,此时系统负荷为10 kW;当光照强度为300 W/m2时,此时光伏阵列不能够完全供给10 kW的负荷,系统切掉二级负荷,此时系统负荷为5 kW;若光照强度过低,光伏阵列产生电压不足以维持5 kW的负荷时,光伏阵列处于关闭模式,此时整个系统关闭。
3.2 模式间切换仿真
当独立光伏发电系统的外部条件发生较大变化时,或者蓄电池端电压达到蓄电池组的过充或者过放电压,使得系统要在不同的工作模式间切换来保护蓄电池组和维护系统能量平衡的目的。图13为系统中光照强度发生变化时,系统在不同模式之间切换的仿真波形。其中在t=2 s时光照强度由1 000 W/m2跳变到0 W/m2,在t=4 s时光照强度跳变到300 W/m2,在t=6 s时蓄电池组过放光伏阵列转入MPPT工作模式。图13展示了系统由工作模式Ⅱ切换到工作模式Ⅰ切换到工作模式Ⅲ再切换到工作模式Ⅴ的波形图。
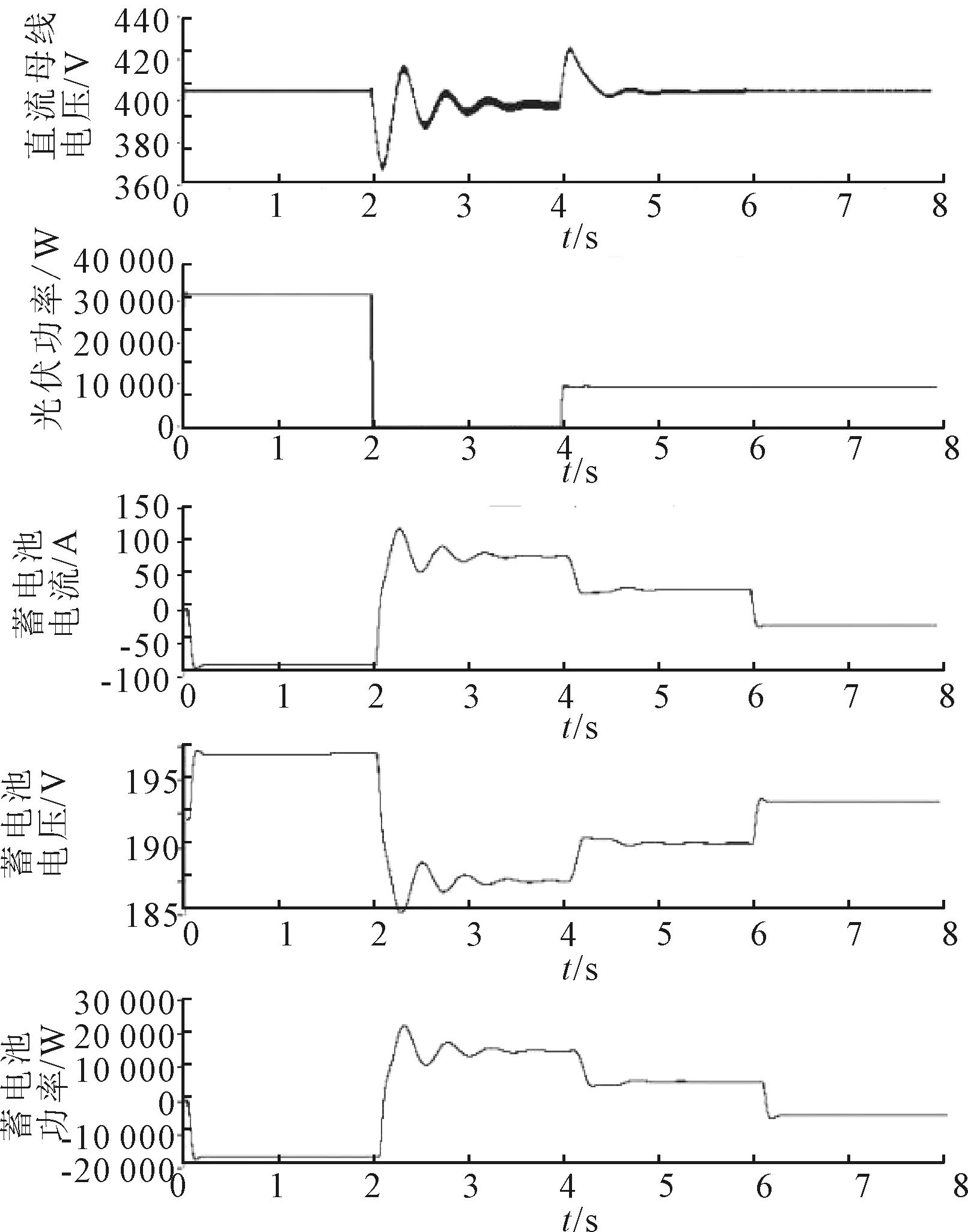
图13 光伏系统模式切换(MPPT)时的仿真波形
从图13可以看出,在负载或者外界环境发生变化时,系统能够在各个模式间进行切换,且此时直流母线电压在外界环境或者蓄电池组状态发生变化时,经过一定波动后能够稳定在400 V左右,维持整个系统内的能量平衡。
当独立光伏发电系统的外部条件发生较大变化时,或者蓄电池端电压达到蓄电池组的过充或者过放电压,使得系统要在不同的工作模式间切换来保护蓄电池组和维护系统能量平衡的目的。图14为系统中光照强度发生变化时,系统在不同模式之间切换的仿真波形。其中在t=2 s时光照强度由1 000 W/m2跳变到0 W/m2,在t=4 s时光照强度跳变到300 W/m2,在t=6 s时蓄电池组过放光伏阵列转入恒压工作模式。图14展示了系统由工作模式Ⅱ切换到工作模式Ⅰ切换到工作模式Ⅲ再切换到工作模式Ⅳ的波形图。
从图14可以看出,在负载或者外界环境发生变化时,系统能够在各个模式间进行切换,且此时直流母线电压在外界环境或者蓄电池组状态发生变化时,经过一定波动后能够稳定在400 V左右,维持整个系统内的能量平衡。
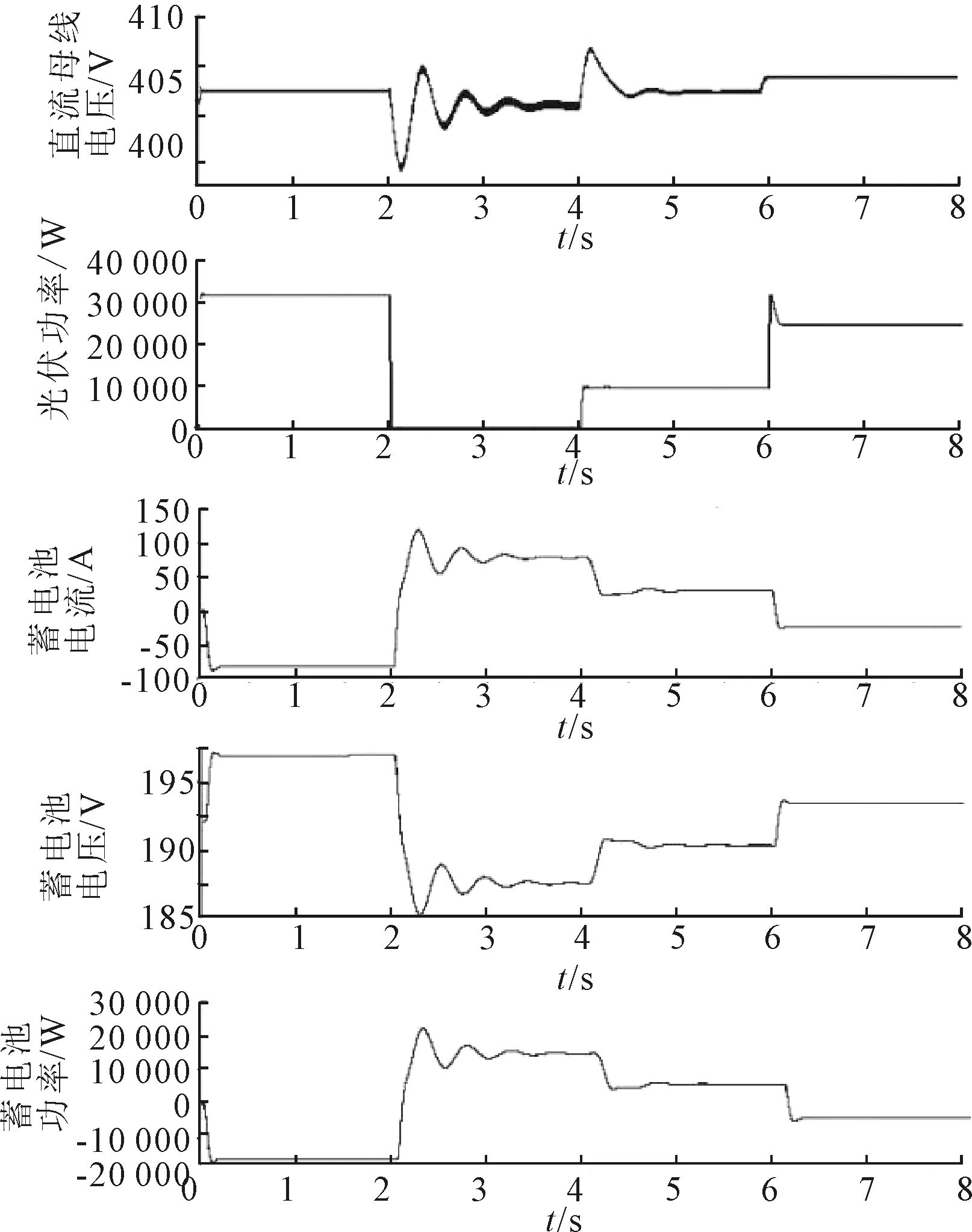
图14 光伏系统模式切换(恒压)时的仿真波形
4 结论
笔者基于LabVIEW软件对光伏电池模型的建立和MPPT算法进行研究,针对MPPT算法中扰动观测法的缺点,研究了一种变步长扰动观测法,有效减小了光伏阵列的功率波动。并在此基础上研究了一种独立式光伏发电系统的集中式能量管理控制策略。仿真结果表明:该光储能量管理系统可以在5种工作模式内与工作模式间自由切换,验证了光储能量管理控制策略的可行性和有效性。
