让机器人会走就不简单!
2018-10-12
大科技·百科新说 2018年8期
人们希望不远的未来,机器人在各种特殊情况中能够不依赖人类“自发”地行动起来,和人们一起完成艰难的任务,但机器人的研发工作并非易事,第一要解决的就是让机器人走起来。
来自韩国的人形机器人DRC-HUBO结合了优秀的灵活性和机动性能,其轮子做的膝盖保证腿能灵活地卷曲起来,并依靠在比赛中完成了诸多高难度任务甩开了大批竞争对手,夺得了机器人大赛的巨额奖金。
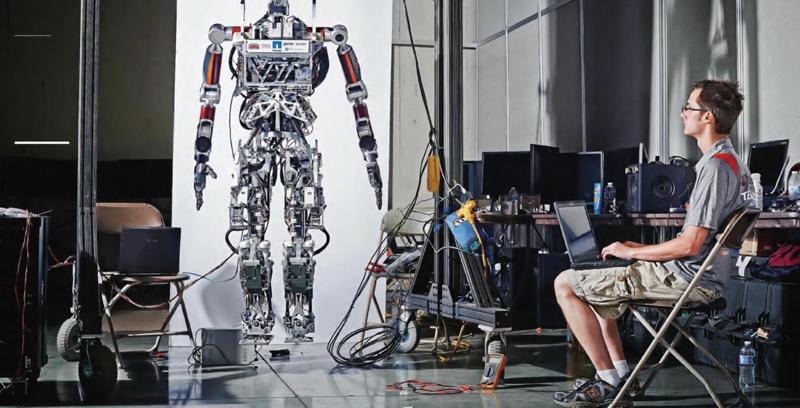
这款将近180厘米高的机器人ESCHER身上最大的亮点就是它弹性十足的关节,通过压缩弹簧获得前进的动能,这样的肢体关节是效率和缓冲减震的结合体。
面对许多以人为中心的任务,如开车、操作器械,很多设计师选择设计人型机器人,但考虑到双腿设计容易跌落,这台“漫步者”装上了减震用的缓冲垫。
这台机器人是为搜索和救援行动提供紧急援助的,设计团队现在面临的最大挑战是编写一款程序,保证它在复杂地面行走但不会摔得太严重。
美國国家航空航天局以灵长类动物作为灵感来源设计了RoboSimian。它非常灵活,每一条肢体都有28处关节,这看起来更像是一只章鱼的触手。
在机器人竞赛中除了竞争,更重要的是合作。这台德国制的“约翰5号”身上就整合了四位潜在竞争对手的软件程序和硬件,它的制造商在网上也免费公开了开源代码。
