基于快速原型的新能源汽车网关控制器开发平台设计
2018-10-12郭海宇张晓光
郭海宇 张晓光
摘 要: 针对缩短新能源汽车网关控制器开发周期,并利用网关控制器对汽车全局信息的把控能力开发控制算法的需求,采用基于模型的嵌入式开发方法,利用The MathWorks公司的Simulink和Stateflow以及dSPACE公司的快速原型硬件平台MicroAutoboxII和实时管理软件Control Desk NG搭建网关控制器开发平台,并基于此平台设计了一款网关控制器软件。最终通过了台架测试和整车测试,实验结果表明,此平台不仅能够适应功能需求的频繁变化,在车辆开发初期快速响应实验验证的需要,同时能够为后续算法验证提供平台,具有很好的延展性。
关键词: 电动车网关; 基于模型的设计; 快速原型; TargetLink; Simulink; Stateflow
中图分类号: TN876?34; TP311 文献标识码: A 文章编号: 1004?373X(2018)19?0141?05
Abstract: In order to shorten the development cycle of new energy automobile gateway controller and use the automobile global information control ability of gateway controller to develop the control algorithm, the embedded development method based on model, Simulink and Stateflow made in the MathWorks Company, rapid control prototype hardware platform MicroAutoboxII and real?time management software Control Desk NG made in dSPACE Company are used to establish the development platform of gateway controller. On this basis, a gateway controller software was designed. The bench testing and vehicle testing were accomplished. The experimental results show that the platform can adapt to the frequent change of function requirements, meet the needs of fast response in early development process of vehicle, provide a basis for the subsequent algorithm verification, and has perfect scalability.
Keywords: electric automobile gateway; model?based design; rapid control prototype; Targetlink; Simulink; Stateflow
0 引 言
当今社会普遍面临着能源枯竭、环境污染等问题。预计到2020年交通用油占全球石油总消耗的62%以上,因此世界各国都在交通能源转型上加大了投入力度[1]。新能源汽车具有排放低、综合能源利用效率高的特点,逐渐成为全球研究的重点方向[2],电动汽车、混合动力汽车得到了飞速的发展。开发新能源汽车控制技术是今后汽车工业发展的必然方向[3]。
随着电子技术和通信技术的飞速发展,现如今的汽车电控系统普遍采用现场总线网络技术。汽车通信方式的改变,解决了由于汽车电控单元不断增加带来的线路复杂和线束增加的问题,不仅极大地提高了通信效率,节约成本,满足汽车轻量化需求,同时也是汽车通信和控制的一个重要基础[4]。由于技术不断创新,汽车网络具有多协议并存的发展趋势,因此网关将是汽车电子的重要组成部分[5]。
传统的汽车电子控制单元开发方式是,汽车厂商向零部件开发商提出功能需求,然后经过开发商报价和签订开发协议,等待开发商提供样件,厂商测试,出现问题再向开发商提出更改需求,如此往复直到产品最终完成。此开发方式不但开发周期长、成本高,且汽车厂商对软件质量把控能力相对较弱。随着基于模型的软件开发技术的不断成熟,以及快速原型产品的不断丰富,汽车厂商为了加快产品开发周期,提高对零部件质量的把控能力,增强自身市场竞争力,越来越多的厂商选择搭建自己的电子控制单元开发平台。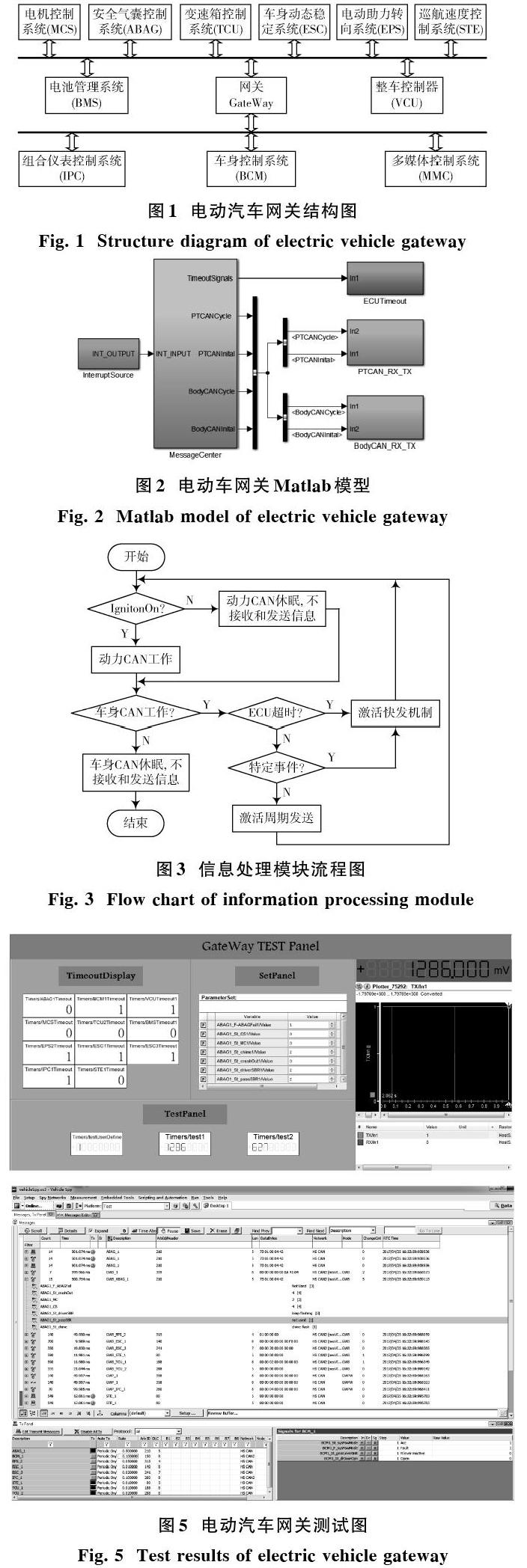
本文选用美国The MathWorks公司的Matlab软件、德国dSPACE公司的快速原型系统开发套件、英国Intrepid的Vehicle Spy3和荷兰NXP公司的MPC5784G进行网关开发平台的搭建,并设计一例具有两路CAN的网关控制器验证平台可行性。
1 汽车通信网络CAN总线
车载控制器局域网(Controller Area Network,CAN)是当前主流的汽车网络,被广泛应用于国外汽车的电器网络中。它解决了现代汽车中不同控制单元以及测试设备之间的实时数据交换。相较于其他车载总线,CAN总线具有高实时性、高可靠性、高灵活性、容易实现和低成本等特点[6]。CAN总线可有效地支持分布式控制和实时控制,多主方式工作,网络上任何一个节点均可在任意时刻主动地向网络上其他节点发送信息,而不分主从;CAN节点只需要通过对报文的标识符滤波即可实现点对点、一点对多点及全局广播等几种方式传送接收数据;CAN总线的通信介质可为双绞线、同轴电缆或光纤,选择灵活[7]。
2 dSPACE快速原型
dSPACE 实时仿真系统是由德国 dSPACE公司开发的一套基于Matlab/Simulink的控制系统在实时环境下的开发及测试工作平台,实现了和 Matlab/Simulink 的无缝连接[8]。
快速控制原型系统是一种在真实环境中无需手动编程就可非常有效且快速地开发、优化和测试控制策略的方法。RCP可用于检查并立即改进设计缺陷。借助 dSPACE的实施软件和实时接口(RTI),可以在 dSPACE硬件上自动运行基于Matlab/Simulink设计的模型。通过使用综合实验与测试环境ControlDeskNG,可在运行期间使用图形控件监控程序和调整程序中相关变量。RCP硬件的处理能力和内存空间要比实际产品级电子控制单元(ECU)强大得多,因此几乎无需考虑任何硬件局限性。dSPACE RCP系统可用作 ECU 的替代品(全通)或扩展(旁路)。dSPACE为控制器开发和设计提供多种现成的软件和硬件组件,在汽车ECU开发中应用来越广泛[9?11]。因此选用此快速原型产品作为平台搭建的元素。
3 网关设计
3.1 系统设计
汽车网络中各种电子控制单元组合成实时控制系统,不同控制器之间通信信息有很强的时效性。除此之外汽车各电子控制单元之间需要进行大量的数据交换,而通信线路信息承载力是有上限的,如若把日益增多的电子控制单元全部挂载在同一条线路上,就很容易出现总线负荷过大,导致系统实时响应速度下降,并产生安全隐患[12]。因此汽车网络需要根据电子控制单元要求的实时性和数据量进行分析,将不同的控制器进行分组,挂载在不同的线路上,这些线路可以是Flexray,CAN,MOST,LIN等[13]。
本文中网关控制器设计以某车型CAN网络为例,网络分为动力CAN和车身CAN。动力CAN上电控单元主要是与电动车动力控制和安全相关的模块,包括电机控制系统(MCS)、电池管理控制系统(BMS)、整车控制器(VCU)、安全气囊控制系统(ABAG)、变速箱控制系统(TCU)、电动助力转向系统(EPS)、车身动态稳定系统(ESC)、巡航速度控制系统(STE)。车身CAN上电控单元主要有组合仪表控制系统(IPC),车身控制系统(BCM),多媒体控制系统(MMC)。车身动力CAN对于信息时效性有较高的要求,因此设置为高速CAN,而车身CAN则可设置为低速CAN。整车汽车电子系统的通信网络拓扑结构如图1所示。
3.2 仿真系统设计
在综合分析网关DBC文件和功能需求之后,利用 dSPACE的实施软件和实时接口,结合Matlab/Simulink和Stateflow进行网关模型的搭建。以层次化建模为指导思想,根据内容不同,将网关分为5个模块:中断处理模块,Stateflow信息处理模块,ECU超时检测模块,动力CAN收发模块,车身CAN收发模块。其中中断处理模块主要负责处理各ECU CAN信息的接收中断和定时器中断;Stateflow信息处理模块是信息处理和加工的核心部分,是网关控制器的大脑,决定信息如何在两条CAN线路上进行交互。同时也是后续控制算法开发的关键部分;ECU超时检测模块是判断网络上控制器是否与线路连接;动力CAN收发模块负责动力CAN线上信息的接收和发送;车身CAN收发模块负责车身CAN线上信息的接收和发送。网关模型如图2所示。
网关核心的信息处理模块采用Stateflow进行搭建。Stateflow是集成于Simulink中的图形化设计与开发工具,适用于针对事件响应系统进行建模和仿真。所谓事件响应系统是指那些通常利用一些自然语言或者邏辑表达式进行描述的系统。传统的动态变换系统通常利用Simulink的数学表达式、方程等组成的输入/输出关系进行建模,而事件响应系统则需要采用Stateflow进行建模。Stateflow和Simulink可以实现无缝连接,创建确定性监管控制系统。利用Stateflow可视化的模型和直观的仿真能力,以清晰、简洁地反映出复杂动态逻辑关系[14]。因此网关关键部分采用Stateflow进行建模。
依据功能规范的要求,在电动车处于点火状态时动力CAN才处于激活状态。此时网关从动力CAN网络上接收动力信息并转发车身网络上接收到的相关信息,否则动力CAN处于休眠状态。车身CAN在ACC时便处于激活状态。在各ECU正常的情况下,网关信息发送方式为周期触发。当存在ECU超时的情况或者存在预先定义的事件发生时,网关对于相关信息采取的发送方式为快发机制。所谓的快发机制即:相关信息在超时或者特定事件发生时打破预先定义的周期触发方式的转发周期,采取短间隔多频次的信息发送方式。信息重复发送的周期和次数是按信息重要程度和总线负载率进行设计的。信息处理模块控制逻辑如图3所示。
3.3 程序监控和测试
本节利用ControlDesk对程序进行调试。ControlDesk是dSPACE公司针对快速原型和硬件在环测试开发的综合试验和测试软件工具,提供对试验过程的综合管理,可实现对实时硬件的可视化管理,变量的可视化管理,参数的可视化管理,试验过程的自动化等[8]。
首先通过Matlab将电动汽车网关模型编译生成SFD格式的文件。然后利用ControlDesk把生成的文件下载到快速原型硬件平台MicroAutoBoxⅡ,进行在线调试。为了实现对程序监控和测试,通过ControlDesk搭建网关软件测试面板。测试面板大体可分为4个部分:超时显示部分,用来显示哪个ECU的信息接收超时;参数设置部分,用来在线调整程序中的参数,不再需要频繁的修改模型、编译和下载,此模块对于程序调试优势明显、效果显著;自由变量测试部分,此部分是独立于程序的变量,用来调试程序;示波器显示部分,可用来显示CAN信息接收和发送状态,显示效果直观明朗。网关程序测试上位机界面如图4所示。
4 产品级代码生成和硬件平台选择
TargetLink自动代码生成工具是dSPACE公司配合快速原型产品开发的套件,它可以方便快捷地将Simulink和Stateflow设计的控制策略生成产品级C代码。由TargetLink生成的代码和手工代码相比,生成速度快、可靠性高、易读性好、易于理解和维护,能够适应多种微处理器和编译器[15]。
利用TargetLink对Matlab模型进行代码转化之前,必须先把Simulink模型转化成TargetLink模型,之后对TargetLink模型进行变量定标和仿真设置。在代码转化之前还要对TargetLink模型进行三个层次的仿真:第一阶段是Simulink仿真,目的是验证模型正确性,记录参考数据,为定标和溢出提供数据依据;第二阶段是软件在环仿真,实质是在PC上仿真TargetLink生成的代码,验证代码正确性,定量分析生成定点代码对算法的影响;第三阶段是处理器在环仿真,实质是在目标板上仿真TargetLink生成的代码,目的是确定执行时间,评估RAM\ROM堆栈利用情况,最终核对代码[16?17]。
恩智浦(NXP)的MPC57xx采用Power Architecture?技术,是面向汽车和工业应用的超高可靠性32位MCU。该系列芯片可实现低端到高端产品的软件和硬件均兼容,采用高密度浮栅技术实现的嵌入式闪存,轻松达到功能安全标准,如ISO 26262 ASIL?D级安全完整性的要求。多种片上冗余和安全选项,例如延迟锁步内核、DMA控制器、存储器保护单元、故障采集和控制单元,同时具有Power Architecture?工具和软件生态合作体系的完美支持。
本平台主芯片选用MPC5748G,主频高达160 MHz,支持单精度浮点运算,8 KB指令缓存和4 KB数据缓存,支持可变长度编码(VLE)提高代码密度,内存高达6 MB FLASH,768 KB RAM,外设资源丰富,支持Ethernet,FlexRay,MOST,CAN,LIN。 硬件选用恩智浦(NXP)的TMPC574XG?MB评估板用于网关模块。该评估系统支持用户对CPU进行完全访问,包括CPU的所有I/O信号和主板外设。
5 实验验证
TargetLink 生成的代码不是一个完整的控制程序,还需将ECU的驱动程序、中断程序等进行整合、编译和调试,然后才能下载到MPC5748G评估板中。利用NXP的开发环境S32 Design Studio IDE和P&E;的Cyclone Universal完成ECU控制程序的生成与调试。
实验验证分为三个阶段。第一阶段为离线测试,利用ControlDesk编写的上位机程序和Vehicle Spy对模型生成的SDF格式的软件进行在线测试和调整,确保能够实现功能规范中的要求,并根据实验结果对模型进行修正和完善。此阶段测试主要由程序开发人员进行,属于白盒测试的范畴。图5为网关测试图。第二阶段为台架测试,由测试组专业人员根据功能规范生成测试用例,然后根据测试用例进行逐条测试。台架上控制系统接收和转发的信息为真实ECU产生的信息。由于测试人员对程序不了解,此阶段测试属于黑盒测试的范畴。第三阶段为实车测试,将生成的产品接入到实车中进行测试和验证,通过此测试的程序便可以下发给零部件厂商进行批量生产。
6 结 语
本文将Matlab,dSPACE RCP,TargetLink,ControlDesk,Vehicle Spy和MPC5748G有机结合成一个高效的电动汽车网关開发平台,并利用平台高效快速地开发了一款可实际应用的网关程序,最终通过三个阶段测试,验证了程序实用性。实际操作证明,开发平台具有如下优势:
1) 开发人员可以将工作重心转移到控制策略的开发,减少手工代码编写所需的时间,提高了工作效率。
2) 控制系统的设计基于模型,相较于代码,模型更直观,易于理解,设计和扩展更方便,同时由模型生成的代码具有更高的可读性,适合团队开发。
3) 汽车生产厂商内部开发控制程序,具有完善的测试环境,开发人员和测试人员无缝对接,高效的信息沟通,问题反馈及时,极大地缩短产品开发周期,同时这种量身定做的程序可以更好地满足自身的需求,使产品具有延续性,加快开发速度同时极大地节约开发成本。
4) 利用网关对汽车总体信息的把控能力,可以用于开发控制策略,满足汽车厂商对于第三方零部件功能的验证需求。
参考文献
[1] 欧阳明高.汽车新型能源动力系统技术战略与研发进展[J].内燃机学报,2008,26(z1):107?114.
OUYANG Minggao. Technology strategy and R&D; progress of automotive new energy and powertrain [J]. Transactions of CSICE, 2008, 26(S1): 107?114.
[2] 田丽媛,王庆年,田晓川.电动汽车电机驱动系统的共模电磁干扰[J].北京理工大学学报,2014,34(10):1028?1033.
TIAN Liyuan, WANG Qingnian, TIAN Xiaochuan. Common?code EMI of motor driving system in EVs [J]. Transactions of Beijing Institute of Technology, 2014, 34(10): 1028?1033.
[3] 陈虹,宫洵,胡云峰,等.汽车控制的研究现状与展望[J].自动化学报,2013,39(4):322?346.
