下肢康复训练伺服系统建模与模糊自整定PID控制
2018-10-12李彩凤杨风
李彩凤 杨风
摘 要: 为提高下肢康复训练伺服系统的控制精度,将模糊控制理论和PID控制结合起来,提出适合下肢康复训练伺服系统的模糊自整定PID控制算法。在说明系统结构的基础上建立模型,详细描述模糊自整定PID控制器的原理及设计过程。仿真结果表明,相对于常规PID法,模糊自整定PID法能够使下肢康复训练伺服系统达到良好的控制效果,输出响应时间缩短并且大大提高了扰动稳定性,具有较好的实际应用前景。
关键词: 下肢康复训练; 伺服系统; 模糊控制; PID; 仿真; 系统建模
中图分类号: TN876?34; TP242 文献标识码: A 文章编号: 1004?373X(2018)19?0129?04
Abstract: A fuzzy self?tuning PID control algorithm suitable for the lower limb rehabilitation training servo system is proposed by combining the fuzzy control theory with PID control to improve the control precision of the lower limb rehabilitation training servo system. The model of the system is established on the basis of the description of the system structure, and then the principle and design process of the fuzzy self?tuning PID controller are described in detail. The simulation results show that, in comparison with the conventional PID method, the fuzzy self?tuning PID method can get more perfect control effect for lower limb rehabilitation training servo system, shorten the output response time, improve the disturbance stability, and has the wider practical application prospect.
Keywords: lower limb rehabilitation training; servo system; fuzzy control; PID; simulation; system modeling
0 引 言
由于下肢康复训练机器人伺服系统的重要医用价值,对其研究已成为国际机器人研究领域的一个热点[1]。下肢康复训练机器人是一种高度智能的机器人伺服系统,具有环境感知、行为控制和执行、动态决策和规划等功能[2]。运动控制是其最基本,也是非常重要的一环。在传统控制领域,由于PID控制器具有结构简单且使用方便的特点经常被使用。而下肢康复训练伺服系统对精度要求较高,简单地使用PID控制很难达到其目的。模糊控制适用于非线性、参数变化大、强耦合,难以获得精确数学模型的控制系统[3]。如果将PID控制和模糊控制两种方法结合起来进行互补,使得PID具有在线整定参数的功能,便能较好解决高精度下肢康复训练伺服系统控制问题。目前,这种结合在康复训练伺服系统控制中的研究和成果并没有广泛应用,下面就这一方法的具体实施进行仿真分析研究。
1 下肢康复训练伺服系统的结构及模型
1.1 伺服系统的结构
下肢康复训练机器人伺服系统控制回路由位置控制器、速度控制器、驱动器、伺服电机以及机械传动机构组成,结构框图如图1所示。驱动电机为Maxon公司的RE25伺服电机,驱动器选择RMDS?107直流伺服电机驱动器,采用编码器作为位置、速度检测元件的双闭环伺服系统。由[PS]给出伺服电机的位置设定值,由编码器采集实时位置,模糊PID控制器的输出通过串口与下位机通信,驱动器接收命令驱动伺服电机。
1.2 整体数学模型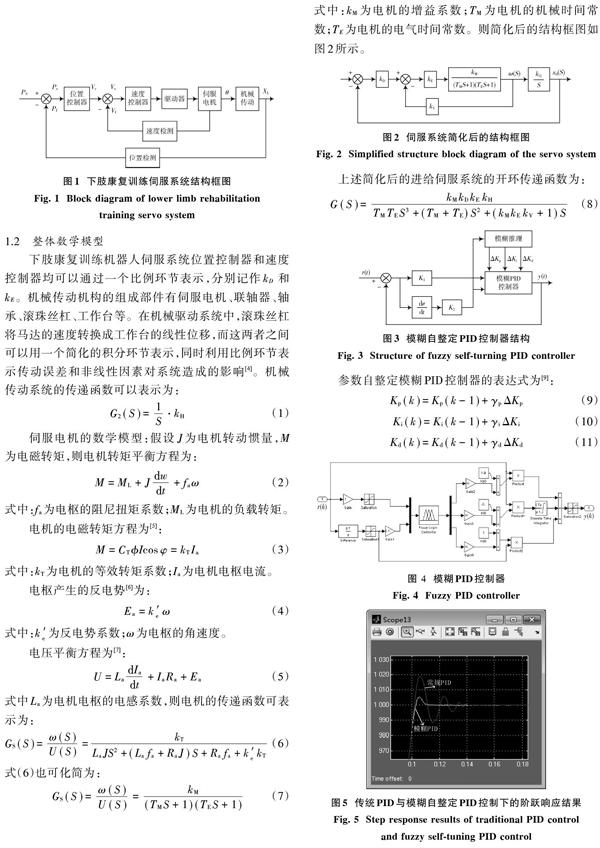
下肢康复训练机器人伺服系统位置控制器和速度控制器均可以通过一个比例环节表示,分别记作[kD] 和[kE]。机械传动机构的组成部件有伺服电机、联轴器、轴承、滚珠丝杠、工作台等。在机械驱動系统中,滚珠丝杠将马达的速度转换成工作台的线性位移,而这两者之间可以用一个简化的积分环节表示,同时利用比例环节表示传动误差和非线性因素对系统造成的影响[4]。机械传动系统的传递函数可以表示为:
2 模糊自整定PID控制器
2.1 模糊PID控制器原理结构
速度控制器是下肢康复训练伺服机构的关键部件,由于传统的PID调节器不具有在线调整参数的功能,因此不能达到良好的控制效果。所以将模糊控制和PID相组合以产生模糊自整定PID控制器,输入为偏差[E]和偏差变化率[EC],PID参数可以通过模糊控制理论在线校正,从而满足不同时刻偏差和偏差变化率对PID参数自整定的要求[8]。整体结构如图3所示。
2.2 模糊PID控制器设计
2.2.1 确定各变量的隶属度函数
通过分析系统要求,模糊控制器采用二输入三输出的形式。控制器的输入为误差[E]和误差变化率[EC],输出为3个参数P,I,D校正值[ΔKp],[ΔKi],[ΔKd]。确定输入[E,EC]及输出[ΔKp],[ΔKi],[ΔKd]变量语言值的模糊子集都为{NB,NM,NS,ZO,PS,PM,PB},子集中的元素依次代表负大,负中,负小,零,正小,正中,正大。其在模糊集上的论域均为[[-6,6]]。在模糊逻辑工具箱中,控制器输入[E,EC]的隶属度函数选择高斯函数,输出[ΔKp],[ΔKi],[ΔKd]的隶属度函数选择三角函数。
