串联多端直流输电系统接地极拓扑研究
2018-10-12马云龙杨建明王永平赵文强
邹 强, 马云龙, 杨建明, 王永平, 赵文强, 俞 翔
(1. 南京南瑞继保电气有限公司, 江苏 南京 211102;2. 国家电网有限公司直流建设分公司, 北京 100052)
0 引言
随着直流输电技术的发展,国内外已经开始着手多端直流输电系统技术的研究。文献[1]仿真研究了并联四端直流输电系统;文献[2]给出了串联多端直流输电系统的拓扑;文献[3]阐述了多端直流输电系统的监视功能;文献[4]阐述了多端直流输电技术的应用前景;文献[5]阐述了多端直流输电系统的绝缘配合;文献[6]分析了多端直流输电对系统稳定性的影响;文献[7]提出了电流源换流器(LCC)和电压源换流器(VSC)混合的多端直流输电技术;文献[8—14]研究了多端直流输电技术的控制保护策略。然而,目前的研究很少涉及含有串联换流器的接地极拓扑结构。而串联多端直流输电系统自身特点(串联站在正常运行时不能接地)决定了在隔离线路故障和换流站故障时都依赖于接地极的投退。因此开展串联多端直流输电系统接地极拓扑的研究工作十分必要。
1 串联多端直流输电系统拓扑
1.1 纯串联多端直流输电系统
图1为四端纯串联多端直流输电系统,可以看出整个系统只有送端1和受端2具有接地极,而串联在线路之中的送端2、受端1没有接地极,其换流阀串联在输电线路上。

图1 纯串联多端直流输电系统Fig.1 Pure series multi-terminal HVDC system
1.2 串并联混合多端直流输电系统
图2为送端采用LCC、受端采用多个VSC并联再与LCC串联的串并联混合多端直流输电系统。中日韩联网工程和落点江苏多个负荷中心的白鹤滩工程也拟采用类似结构。

图2 串并联混合多端直流输电系统Fig.2 Series and parallel hybrid multi-terminal HVDC system
1.3 包含串联换流器拓扑的缺陷与优点
多端直流输电系统在运行过程中,并联在输电线路上的换流器及首端和末端换流器都须有接地极投入运行,而串联在线路上的换流器则不能有接地点。如图2中的蒙古站、山东站、韩国站及日本站须有接地极投入运行,而串联在线路中的天津站则不能接地。并联换流站检修时可直接退出运行并不会影响整个系统的功率传输回路,而串联换流站由于换流器自身就是整个系统功率传输回路的一部分,如退出运行将导致部分甚至整个系统停电。
如图1所示,当极一线路1、极一线路2、极一线路3、极二线路1、极二线路2、极二线路3、送端1、送端2、受端1、受端2任意一个环节需要检修时,四端串联多端直流输电系统的相应极需要停电。当送端1接地极或者受端2接地极检修时,四端串联多端直流输电系统的两极都需要停电。图2中如果天津站不设置接地极,当蒙古站或者蒙古—天津线路检修时天津站将处于开路状态,整个系统也必须退出运行。另外当天津站检修时,如果没有旁路措施蒙古站也必须退出运行。综上所述,包含串联换流器的拓扑其可靠性不如纯并联换流器拓扑。
虽然包含串联换流器的拓扑可靠性较差,但也有优点。由于目前投入工程应用的直流电缆其最高电压等级只能达到500 kV,图2所示的系统把天津站串联在输电线路上,直接将天津站至日本站的电压等级降低到+400 kV,这为实现中国、韩国、日本联网提供了可能性。另外,当多端直流输电系统中有VSC时,为了降低VSC的电压等级,包含串联换流器的拓扑也是一个不错的选择。
2 串联多端直流输电系统对接地极的要求
串联多端直流输电系统存在多种运行方式,不同运行方式对接地极拓扑的要求也不一样[15]。下面以图1所示的四端串联直流输电系统为例说明运行方式对接地极拓扑的要求。
2.1 单极大地回线运行方式
单极大地回线运行方式下,当四端串联直流输电系统的送端1因故障退出运行时,为最大程度保障系统运行,需要将送端1旁路,并将极一线路1跨过送端1换流器直接与送端1的接地极相连。
为了保证送端换流器运行数目与受端换流器运行数目一致,受端1和受端2换流器必须要有旁路设备。当送端1和受端1(也可以是受端2)被旁路时,送端2和受端2构成的两端直流输电系统仍然可以正常送电,如图3所示。

图3 采用送端1接地极的两端单极大地回线运行方式Fig.3 Two-terminal monopole ground return operation mode with the sending end 1 electrode
送端1接地极或线路1检修时,考虑到单极大地回线运行时接地极电流很大,为保证输电系统正常运行,只能在送端2配置一个能通过大电流的接地极,且旁路送端1和受端1换流站,如图4所示。

图4 采用送端2接地极的两端大地回线运行方式Fig.4 Two-terminal monopole ground return operation mode with the sending end 2 electrode
2.2 金属回线运行方式
金属回线运行方式下,当送端1、送端2、受端1或受端2任意一个换流器检修时,为保证剩余系统继续运行,对接地极拓扑的要求与大地回线相同。当受端2接地极或者线路3检修时,为保证系统持续运行,要在受端1配置接地点,如图5所示。

图5 采用受端1接地点的金属回线运行方式Fig.5 Metallic return operation mode with the receiving end 1 grounding point
2.3 双极大地运行方式
按站外接地极是否流过电流可以分为双极平衡运行和双极不平衡运行两种情况。
2.3.1 双极大地平衡运行方式
在双极平衡运行方式下,接地极没有持续的运行电流流过。当送端1极一换流器故障时可以采用与单极大地回线类似的处理方法,即隔离送端1换流器和受端1换流器,如图6所示。

图6 采用送端1接地极的双极大地回线平衡运行方式Fig.6 Bipolar ground return balance operation mode with sending ending 1 electrode
当送端1接地极或者线路1故障时,如果在送端2增设一接地点,则可以将送端1及其接地极全部退出运行,具体运行方式如图7所示。
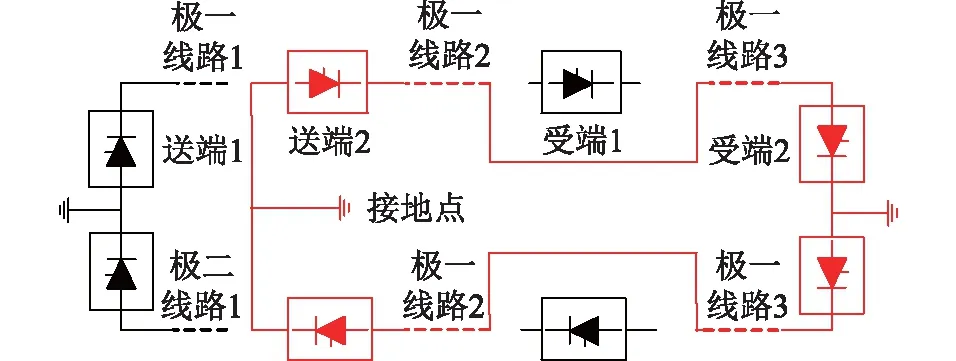
图7 采用送端2接地点的双极大地回线平衡运行方式Fig.7 Bipolar ground return balance operation mode with sending ending 2 grounding point
2.3.2 双极大地不平衡运行方式
双极大地不平衡运行时,在送端1极一换流器检修时,其剩余系统的投入运行情况与图6相同。
在送端1接地极故障时,剩余系统的投入运行情况与图7相同。此时要求送端2的接地点能通过大电流,或者将传输电流大的那一极电流减小至与另一极电流相等再投入运行。
当极一线路1(或极二线路1)故障时,为了保证剩余系统继续不平衡运行。应将送端1的极一换流器和极二换流器全部退出运行,并将极二换流器(或极一换流器)旁路。送端2极一换流器的阳极与极二换流器的阴极连接,连接线通过极二线路1(或极一线路1)接入送端1接地极,如图8所示。

图8 双极大地回线不平衡运行方式Fig.8 Bipolar ground return unbalance operation mode
3 串联多端直流输电系统接地极拓扑研究
3.1 串联多端直流输电系统接地极拓扑
随着运行方式的改变,串联多端系统在换流器、直流线路或者接地极检修时,未检修站继续运行对接地极拓扑提出的要求不尽相同。综合所有的运行方式,串联多端直流输电系统接地极拓扑应具备以下功能:接地极拓扑能旁路任意换流站,每个换流站配置能流过大电流的站外接地极,并且能将送端2和受端1的极一换流器阳极(阴极)或者极二换流器阴极(阳极)连接后再与相应的接地点连接。另外接地极拓扑能把送端2(受端1)通过线路1(线路3)与送端1(受端2)的接地极连接。
但是,送端2和受端1换流站在正常运行时不需要接地,只有当送端1或者受端2的接地极检修等特殊场合时才投入使用。而站外接地极征地、选址非常困难,因此建议送端2和受端1只配置与站内接地网连接的接地点,不单独配置站外接地极。在单极大地回线或者双极不平衡运行时,如果送端1或者受端2的接地极检修,可以将单极大地回线转化成金属回线运行、将双极不平衡运行方式转为双极平衡运行方式。
根据上述要求并结合已有研究成果[16-17],本文设计如图9所示串联多端直流输电系统接地极拓扑。

图9 串联多端直流输电系统接地极拓扑Fig.9 Electrode topology of series multi-terminal HVDC system
串联多端直流输电系统接地极拓扑包括送端1的开关S1、S2、S3、S4、S5;串联在线路上的送端2、受端1的开关SR1、SR2、SR3、SI1、SI2、SI3、SL1、SL2、SL3、SL4及旁路开关SB;受端2的开关设备S1、S2、S3、S4、S5。其中送端1和受端2的接地采用能流过大电流的站外接地极,送端2和受端1的接地采用与站内接地网相连的方式。
3.2 串联多端直流输电系统接地极拓扑控制方法
针对串联多端直流输电系统不同运行方式说明图9所示的接地极拓扑几种典型的控制方法。
3.2.1 单极大地回线运行方式
在单极大地回线运行方式下,针对图3所示的送端1换流器检修时,接地极拓扑的控制方法如图10所示。

图10 单极大地回线接地极拓扑控制方法Fig.10 Electrode topology control method of monopole ground return operation mode
3.2.2 金属回线运行方式
图5所示的线路3检修时,极一金属回线运行方式下接地极拓扑的控制方法如图11所示。送端2和受端2的组合、送端1和受端1的组合以及送端1与受端2的组合也可以通过控制开关的分合状态来实现金属回线的运行。
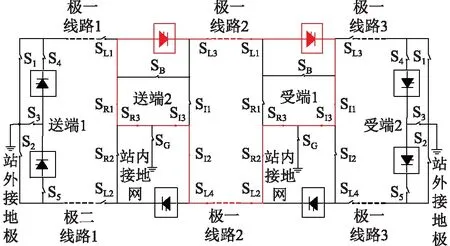
图11 金属回线接地极拓扑控制方法Fig.11 Electrode topology control method of metallic return operation mode
3.2.3 双极大地回线运行方式
图7所示的双极大地平衡运行方式接地极拓扑的控制方法如图12所示。送端2和受端1的组合、送端1和受端1的组合以及送端1与受端2的组合也可以通过控制开关的分合状态来实现双极大地平衡运行方式。图8所示的双极大地不平衡运行方式接地极拓扑的控制方法如图13所示。

图12 双极平衡运行接地极拓扑控制方法Fig.12 Electrode topology control method of bipolar ground return balance operation mode

图13 双极不平衡运行接地极拓扑控制方法Fig.13 Electrode topology control method of bipolar ground return unbalance operation mode
4 结语
本文给出了串联多端直流输电系统两种主要拓扑结构并分析了其优缺点,指出串联多端直流输电系统中,串联在线路上的换流器在正常运行时不能接地,是影响整个系统可靠性的重要因素。分析了串联多端直流输电系统在不同运行方式下如果发生设备检修,维持剩余系统继续运行对接地极拓扑的具体要求。并根据这些要求,设计了一种串联多端直流输电系统接地极拓扑。给出串联多端直流输电系统接地极拓扑在直流不同运行方式下的控制方法,该接地极拓扑在串联多端直流输电系统任意一条线路、接地极或者换流站需要检修时,都能最大程度地保证剩余串联直流输电系统在任意一种直流运行方式下正常运行。