基于机器视觉技术的铁路隧道衬砌表面状态检测系统设计与实现
2018-10-12丁道祥
丁道祥
(中国铁路沈阳局集团有限公司科学技术研究所,辽宁 沈阳 110013)
隧道是重要的铁路设施,其状态好坏直接影响铁路行车安全及运输效能。我国铁路隧道总数量及总里程均处较大规模,这些隧道建设年代不同,材料各异,结构多样。大量早期建设的隧道,存在不同程度的损坏,且呈逐年恶化趋势。《铁路桥隧建筑物修理规则》中规定隧道要定期进行检测,及早发现损坏及时维修,避免事故发生,但以往因隧道衬砌表面状态检测技术相对落后,主要采用目视检查、人工记录、钉锤敲击等方法,费工费时。
目前隧道衬砌表面状态检测技术手段主要有人工目测、人工仪器检测、地质雷达探测、多光谱分析法等。人工检测费工费时、效率低,主要依靠工作人员的经验来对裂缝进行判断,有一定的主观性,很难保证检测结果的准确性,而且检测的过程中必须要暂时停止过往车辆运行,通常还要借助升降车等起落设备,检测人员具有一定的危险性;人工仪器检测需要工作人员操作仪器近距离进行对焦、读取数据和记录数据,这种检测手段同样不仅效率低、劳动力大,而且人工读取的数据容易出现误差;地质雷达检测虽然可以准确地探测出裂缝,但是不具有图像采集系统的多功能性;多光谱分析法虽然可以检测到微小的裂缝,但是检测效率低,不适合应用到隧道衬砌表面状态检测中。
为了能更加准确、快捷、安全的检测隧道衬砌表面状态,本文提出一种基于机器视觉技术的铁路隧道衬砌表面状态检测方法,利用线阵图像采集技术,实现在高速状态下,对隧道衬砌表面状态进行非接触式检测,形成完整、高清晰度的隧道衬砌表面图像,并通过智能图像处理技术自动识别出问题点图像及定位信息。
1 系统设计
1.1 系统总体结构
系统可分为图像采集和图像处理两个子系统:图像采集系统主要包含检测车、工业线扫相机、图像采集卡、照明设备、定位系统、工控机;图像分析处理系统主要包括图像增强、图像分割、图像特征识别与提取。系统结构如图1所示。

图1 系统结构示意图
1.1.1 图像采集系统
图像采集系统主要包括检测车、工业线扫相机、照明设备、定位系统、图像采集卡、工控机等几个部分。系统设计为车载式,安装在现有的隧道限界检测车上,充分利用隧道限界检测车车体结构和试验环境进行设备布局、安装。
线扫相机按检测角度覆盖区域分布在隧检车机械间检测窗内,照明系统光源与线扫相机一一匹配安装,如图2所示。
图像采集系统各个组成部分主要功能如下。
(1)检测车:设备的载体。
(2)线扫相机:衬砌表面图像采集。
(3)照明设备:补偿隧道内光照亮度,满足线扫相机对光照的较高要求。
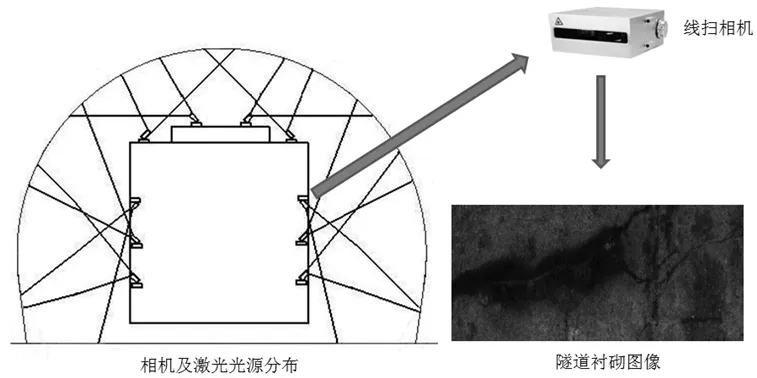
图2 系统布局示意图
(4)定位系统:采集实时车速,将相机的采集速率和检测车的速度相匹配。
(5)图像采集卡:将采集到的图像信号转换成工控机能够识别、处理的数字信号,压缩处理后存入工控机硬盘中。
(6)工控机:整个检测系统的'大脑',在检测过程中,工控机作为图像采集软件的硬件平台负责图像采集过程的控制,同时采集并存储检测车的速度和位置信息;在图像处理系统中,工控机作为图像处理软件的硬件平台负责图像信息处理和提取。因此工控机性能的好坏直接影响到检测质量。
在整套检测系统中,还需配备供电子系统、定位子系统、照明子系统才能保证检测工作正常进行,设计方案如下。
(1)供电子系统
检测系统需要连续长时间工作,且系统中的各部分设备都离不开电源供电,为了确保检测过程中设备供电不发生异常,必须具备稳定的供电系统为检测系统进行不间断供电。因此,检测车安装柴油发电机组,为车内设备和生活设施提供电源,不依赖外部供电。同时,用电设备前端安装有不间断稳压电源,给用电设备提供一个稳定的用电环境,免受电压波动带来的干扰,保证检测过程中即使发电机组故障断电检测系统仍能继续工作一定时间。
(2)定位子系统
车速定位子系统在整个检测过程中是非常关键的,一是定位车辆当前行进总里程,二是定位车辆在隧道内实际位置,并与扫描图像一一对应起来。定位算法是根据车速传感器数值计算出来的。在检测过程中需要实时采集检测车的速度,车速传感器的理论计算公式为:

其中,D代表车轮轮径,f代表车速传感器的输出脉冲频率Hz,N代表车轮旋转一圈车速传感器发出的脉冲数。
(3)照明子系统
目前,大部分隧道内灯光的光照强度较弱,再加上建造隧道用的混凝土颜色较深,因此可能影响到采集的图像质量,给裂缝图像的识别和特征提取增加难度。因此,为了得到高质量的图像,同时便于后期图像处理、特征识别以及提取,必须要为采集系统提供照明系统。由于相机距离隧道衬砌表面较远,普通LED光源无法达到良好效果,所以应该选择激光光源作为照明设备。
1.1.2 图像处理系统
图像处理是综合数字图像处理技术对采集到的隧道表面图像进行处理、分析、提取裂缝特征信息的过程。图像处理的核心过程如图3所示。
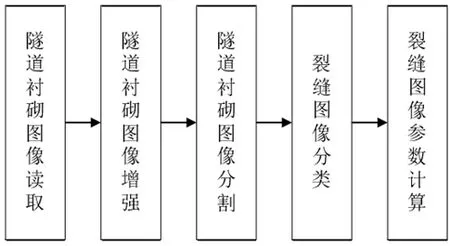
图3 图像处理过程示意图
(1)裂缝图像增强
图像预处理就是将采集到的隧道衬砌表面图像进行增强,以达到提高图像质量的目的。图像增强的结果是凸显图像中的重要部分,去除或者减弱不重要的部分,便于后期的图像特征提取和参数计算。
(2)裂缝图像分割
图像分析是对采集到的隧道衬砌表面图像进行分割,提取出图像特征部分,包括图像的边缘、区域等,是进行图像分类、参数计算的前提,是实现图像分析首先要完成的操作。
(3)裂缝图像分类与参数计算
为了给隧道衬砌维护提供技术支持,需要将采集到的隧道衬砌表面图像进行裂缝识别、提取特征值(如裂缝面积、长度和宽度),然后依据特征值将图像裂缝进行分类。最后将得到的裂缝数值与相关标准进行比对,评估出隧道的危险等级。
1.2 系统工作原理
当检测车进入隧道后,线扫相机开始以一定的行频扫描隧道表面状态,行频根据实时车速自动调节,保证图像不出现拉伸或者压缩现象;然后图像采集卡将采集到的图像信号进行转化和压缩,存储在工控机中;最后应用图像处理分析系统对采集到的图像进行处理,处理的结果是把裂缝目标从背景区域中分离出来,对裂缝图像进行参数值计算和分类,最后将裂缝参数与裂缝评价标准进行比对,得出裂缝破损等级,为工务部门制定维修方案提供决策依据,保证隧道的安全运营。系统工作原理如图4所示。
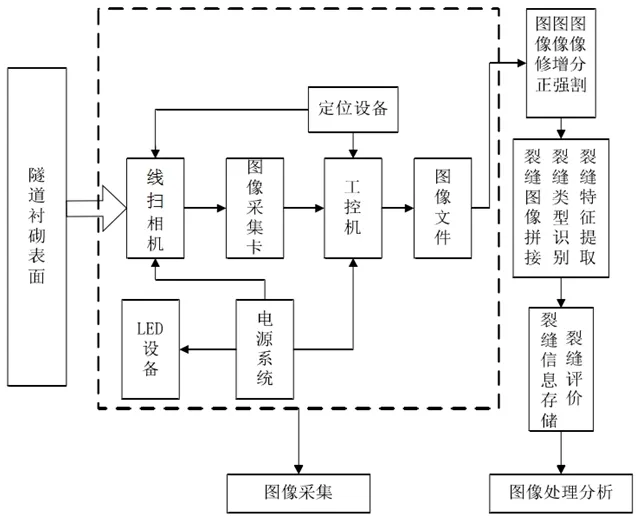
图4 系统工作原理图
2 前期工作基础
2016年初,沈阳局集团公司科研所课题组针对隧道衬砌表面状态检测进行了大量调研,对国内外前沿的图像采集设备及图像处理技术进行了深入研究,最终确定了图像采集系统采用工业线扫相机结合激光光源采集图像,图像处理分析系统采用图像增强、图像分割、图像自动分类、裂缝参数计算(面积、宽度、长度)、裂缝病害程度分级等处理分析技术。
2016年3月,课题组委派技术人员,在隧道限界检测车WX998264检测沈阳局集团公司隧道限界期间,进行了隧道衬砌表面状态图像采集实验,在列车运行状态下,用一台工业CCD线阵一体机拍摄隧道衬砌,检测效果基本达到预期目标,为下一步工作打下了基础。图5为当时在隧检车内安装检测设备的情况。

图5 前期试验工作设备情况
图6、7为实际检测图像。可以看出,图像成像较为理想,衬砌表面裂纹清晰可见,精度约为3mm左右,若再对图像进行后期分析处理,检测精度可进一步提升。

图6 前期试验测试图像1

图7 前期试验测试图像2
3 结语
本文介绍了一种基于机器视觉技术的铁路隧道衬砌表面状态检测方法,论证了充分利用现代工业图像检测、处理技术,可实现隧道衬砌表面状态的高速检测及病害分析,从根本上解决传统检测手段带来的弊病,从而有效保障铁路隧道运营安全,具有良好的应用前景。