平板闸门精确控制信号改造
2018-10-12文兴
文兴
(金平国能电冶开发有限公司,云南 红河州 661500)
目前随着集控运行方式的推广,很多采用平板闸门的电站和水库对平板闸门都开始逐步实现远程控制改造。但实现远程控制闸门非常重要的全开位和全关位、闸门实际开度量采集,现在的技术几乎都是通过卷扬机中间轴的转动来实现。这种对开关量和模拟量的采集误差大,只能适合现地控制,如果是远方控制很可能出现因采集量误差,开关位置动作不正确而发生闸门失控现象。由于很多电站大坝值守人员文化水平低,只能适应简单的操作,没有紧急事故处理的能力。
目前已经发生很多起闸门冲顶的事故案例值得我们反思。为确保远方操作能准确控制平板门,结合平板门特点对平板门的位置信号和开度信号进行了技术改造。改造后的控制信号能准确反应闸门工作状态,并且通过现场的机械指示可清楚地知道闸门真实开度。
1 闸门全开位置的实现
为准确得到闸门的全开位置,在闸门下部焊接一个限位杆(限位杆根据全开实际位置焊接),当限位杆动作行程开关时,将闸门全开点信号输送给控制柜和远控PLC,如图1。
远程操作时最主要的极限位置信号必须可靠。为确保闸门全开位和全关位时闸门位置信号可靠动作,以前由轴上连接的限位行程开关还是接入闸门现地控制柜里面,调节位置信号时稍稍比实际过一小点。新安装的闸门全开位和全关位行程开关动作信号就接入远程控制PLC。这种冗余配置确保了闸门远程操作极限位置动作的可靠性。

图1 闸门上限位安装图片
2 闸门全关位和现场实际开度的实现
如图2所示,闸门下限位的实现是通过在闸门顶上焊接一根向上的钢管,最上面焊接一个限位块。当闸门达到全关位置时,限位块动作于行程开关将闸门全关位置上传。该信号在PLC编程过程中当全关位动作后一定要延时1秒让闸门电机停止工作。这样做的目的是确保全关位置时钢丝绳处于松弛状态,钢丝绳不长期受力。

图2 闸门全关位和现地直观开度尺
目前平板闸门都是通过和轴连接的编码器以数显表的形式来实现闸门开度。但这个开度是否准确,现场运行值班人员无法判断。我们曾发现好几起闸门开度和显示不对应的情况。为准确判断闸门的实际开度,我们在闸门下限位限位杆上安装了一条反方向的刻度尺,通过指针指示刻度尺的数据准确显示出闸门的实际开度。
3 闸门开度准确实现
以前闸门开度采用的是和轴连接的编码器来实现,因为是通过比较大的转比换算,实际显示的误差大,不能作为控制信号精确地远控闸门。为了使闸门开度准确,我们根据闸门轴旋转做了一个非常复杂的计算过程并写入了PLC里面。但实际运行过程中因机械结构问题还是存在一定的误差,不能准确测量出闸门的实际开度。为得到可靠的开度信号,直接将闸门开度采集器改为拉线式位移传感器,反应闸门开度的拉线跟闸门同时运动,准确反应出闸门实际开度(如图3、4所示)。
4 结语
通过现场技术改造和实际运行,闸门信号能准确上传到监控系统,确保闸门可靠控制。为保证闸门动作的可靠性,我们还在闸门远程操作的过程中增加了工业视频监控。为防止因操作闸门的接触器触点粘连、闸门失去控制等情况发生。将闸门供电的总电源开关器改成可以远程控制的断路器,该断路器直接安装在有人值班的中控室外。当紧急情况发生时,直接断开闸门总电源,确保现场设备安全。此项技改方案是在实际工作中总结出来的经验,没有高深的技术含量,但打破了传统平板门信号采集的思路。动作可靠是实现平板门远程操作的有力保障。

图3 现场安装的拉线式位移传感器
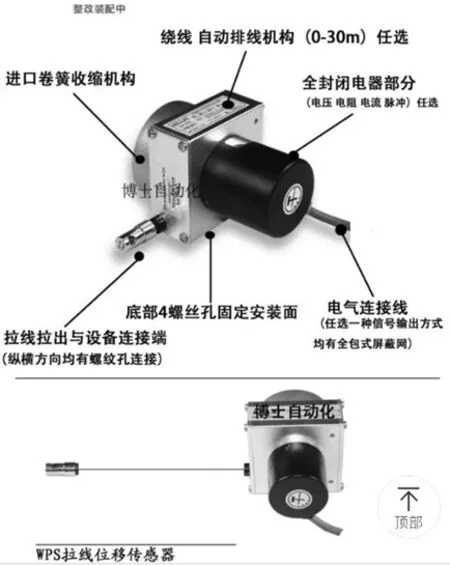
图4 拉线式位移传感器厂家安装图
