深孔轴线直线度误差评定方法*
2018-10-11包建东
李 晓, 包建东
(1. 南京理工大学 机械工程学院, 江苏 南京 210094; 2. 南京理工大学 自动化学院, 江苏 南京 210094)
0 引 言
根据形状误差的国家标准及国际标准, 直线度误差定义为被测实际直线相对于理想直线的偏差, 该理想直线应符合最小条件[1]. 直线度的优劣会影响产品的性能及寿命等指标, 因此直线度误差的评判是一个重要的课题. 目前, 深孔轴线直线度误差评定的方法主要有: 端点连线法、 最小二乘法、 最小区域法. 其中前两种方法属于近似评定, 一般不能满足最小条件. 为此, 国内外学者研究了许多基于最小包容区域原则的方法: 计算点数较少时采用计算几何评定方法如凸多边形法、 极值搜索法等, 优化方法如遗传算法、 粒子群算法等, 以尽可能真实地反映直线的直线度误差. 不同的评定方法对直线度误差结果影响较大, 进而影响对产品质量的判断, 故而有必要进行深孔直线度误差评定方法的研究[2].
1 评定方法
本文通过介绍几种常见直线度误差评定方法的原理, 并以深孔光电检测实验采集的坐标数据为例, 分别用5种方法对其进行直线度评定, 并比较各方法优劣和评定精度. 采用某实验中采集的3组深孔坐标数据, 每组10个测量点, 将原始坐标转换为偏心距, 转化后的轴向位置x及偏心距y数据如表 1 所示.

表 1 偏心距数据
1.1 端点连线法
建立如图 1 直角坐标系xoy,x轴表示轴向位移,y轴表示光电坐标偏心距.
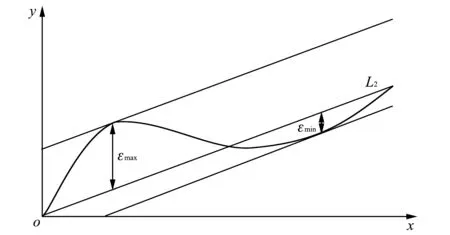
图 1 端点连线法原理示意图Fig.1 Endpoint connection principle diagram
连接首末两点, 直线L1方程为
(1)
式中:x0,y0为起点坐标值;xe,ye为终点坐标值.
计算误差曲线上各点(xi,yi)到直线L1的偏差(有正负)
εi=yi-fi
(2)
作包容所有点的L1的平行线, 那么两平行线在y轴上的距离
p=εmax-εmin
(3)
即为直线度误差值[3].
1.2 最小二乘法
根据表 1 数据计算最小二乘直线方程
f=ax+b,
(4)
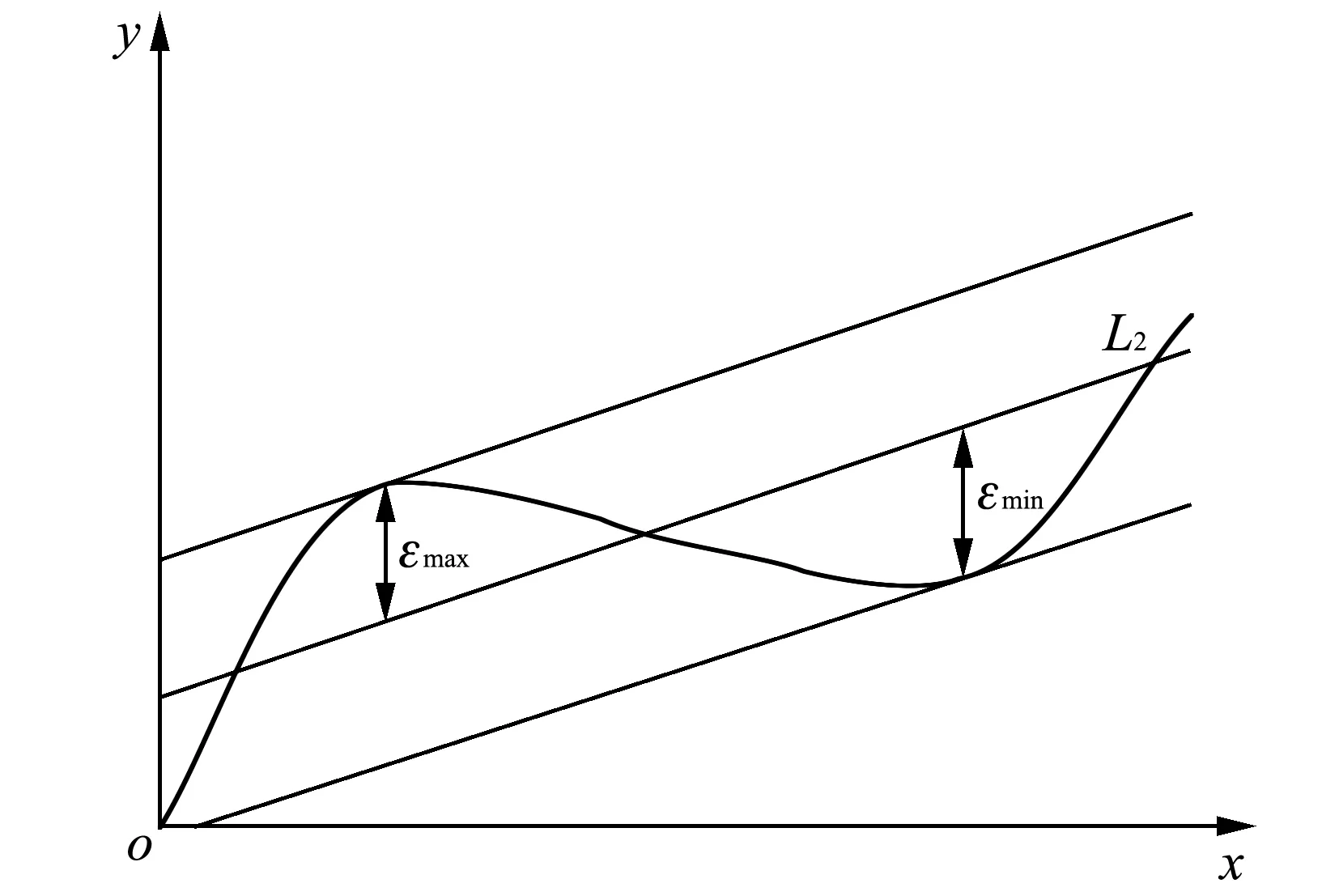
图 2 最小二乘法原理示意图Fig.2 Least square method principle diagram
式中:n为测量点数;
(5)
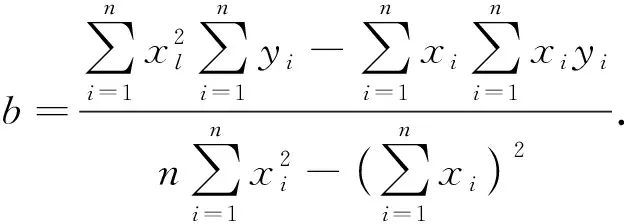
(6)
计算误差曲线上各点(xi,yi)到如图 2 直线L2的偏差(有正负)
εi=yi-fi.
(7)
求出εi中的最大值和最小值, 作包容所有点的L2的平行线, 那么两平行线在y轴上的距离
p=εmax-εmin
(8)
即为直线度误差值[4].
1.3 极值搜索法
计算最小包容区域主要是寻找到满足条件的“低-高-低”或“高-低-高”3点.
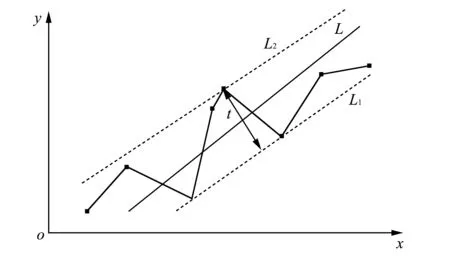
图 3 极值搜索法原理示意图Fig.3 Extreme search principle diagram
如图 3, 以最小二乘拟合直线L为基线, 称基线上侧为高点区, 下侧为低点区, 分别在两侧寻找满足条件的平行包容线组, 计算其间距. 找出所有满足条件的包容线间距ti(i=1,2,3……n)中的最小值tmin, 作为所求直线度误差[5].
如图 5(c) 对于第一组测量数据最小包容区域计算中, 低点连线为下包容线且满足间距为最小值时, 下包容线方程为
0.11x-60y+37.97=0,
(9)
这对包容线L1h、L1l间的距离为t1=0.440 mm. 高点连线为上包容线且满足间距为最小值时, 上包容线方程为
0.001x-45y+52.28=0.
(10)
这对包容线L2h、L2l间的距离为t2=0.521 mm. 则最小区域法直线度误差即为tmin=0.440 mm.
1.4 分割逼近法
基于分割逼近法提取理想直线的思路是: 拟合最小二乘直线如式(4), 并以此为起始直线进行搜索, 在一定的角度范围内以最小二乘直线斜率的变化量δa为间隔进行分割, 寻找满足最小区域的理想基准直线. 如图 4 所示实线为最小二乘线, 虚线为
f′=(a±m·δa)x+b,
(11)
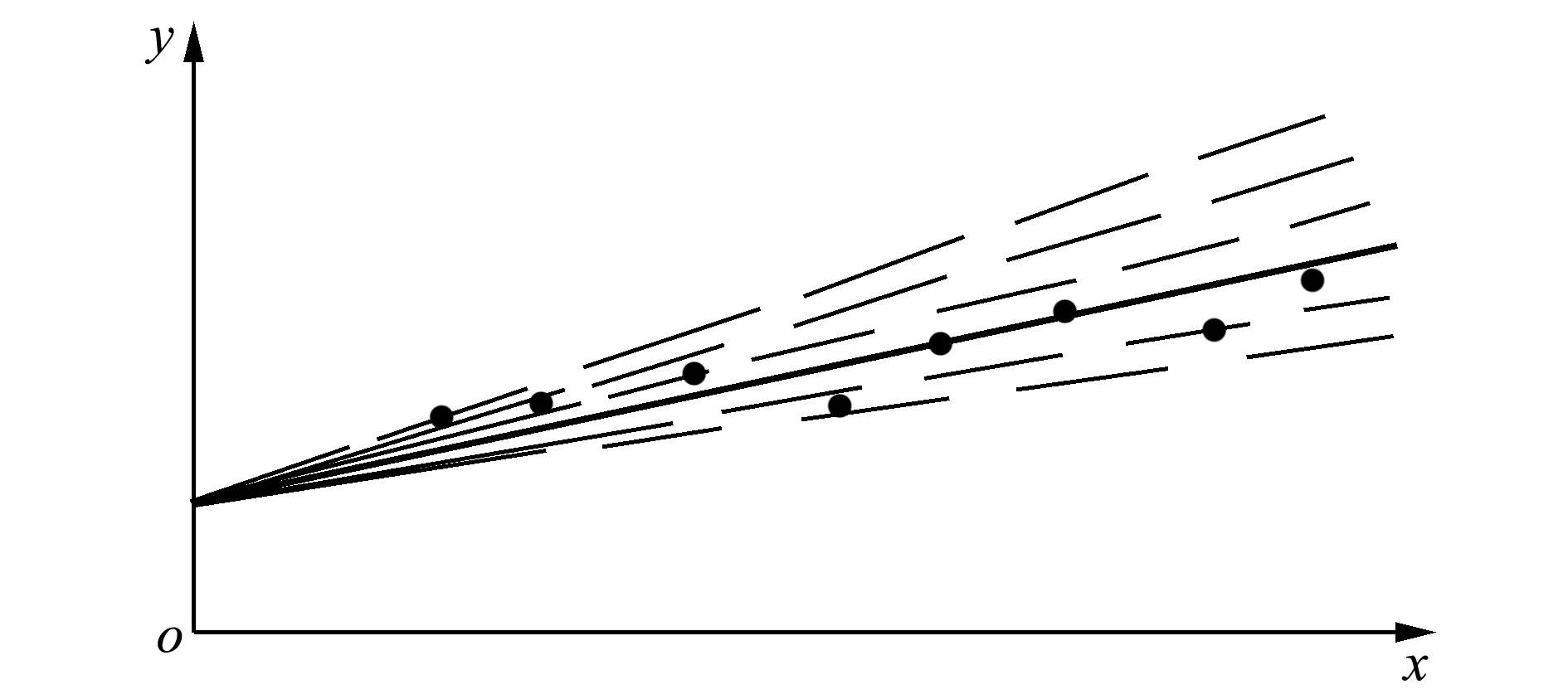
图 4 分割逼近法原理示意图Fig.4 Segmentation approach principle diagram
也即初始直线绕Q点逆时针和顺时针分别旋转角度, 计算对应于所设角度范围内所有分割线的直线度误差值pi, 其中最小值min(pi)就是符合最小包容区域的直线度误差值, 对应于min(pi)的直线就是符合最小包容区域的理想直线[6].
本例中逆时针和顺时针所设角度范围θ分别为1.5°, 分割次数m分别为240, 那么对应的角度增量或减量为0.37′,斜率变化量δa=1×10-4. 根据上述分割逼近原理, 得到如图5(d)所示结果, 由于分割线较密集, 图中仅展示5条分割线, 其中点划线即为所得理想直线, 斜率为0.001 822, 实线表示初始直线.
1.5 遗传算法
遗传算法以生物进化为理论基础, 总体来说是一个不断迭代更新的过程. 首先提取出问题的解对其进行编码构成“染色体”, 作为种群中的个体. 根据目标函数得到适应度函数, 由此算出个体的适应度值, 通过选择、 交叉、 变异一系列操作使种群完成新一代的进化, 这样一代一代不断更新最终求得最优解[7-8]. 算法步骤为:
1) 编码构成初始种群A0(t).
2) 计算个体适应度
h(k)=gmax-g(k),
(12)
式中:g(k)为目标函数
3) 选择操作, 根据适应度大小得到n个新个体A1(t).
4) 交叉操作, 形成A2(t).
5) 变异操作, 形成新一代A3(t+1).
6) 检查进化代数.
7) 保存适应度最大的个体, 求出对应的目标函数值即为直线度误差.
评定过程中所需参数设置为: 种群规模n=50; 交叉概率pc=0.6; 变异概率pm=0.02; 最大进化代数t=1 000. 算法运行优化迭代过程如图5(e)所示.
根据表 1 偏心距数据, 采用计算机辅助工具对数据进行仿真, 第一次测量数据的曲线图分别如图5(a)~图 5(e) 所示.
图 5 评定直线度曲线Fig.5 Assess the straightness curve
2 结果比较
对各方法3组结果求平均值, 最终结果如表 2 所示.
仿真结果表明, 端点连线法和最小二乘法评定结果最大; 极值搜索、 分割逼近和遗传算法此3种方法评定出来的误差较前两种方法精度均有提高, 遗传算法评定的直线度误差比端点连线法提高约4.4%, 比最小二乘法提高约3.4%, 其精确度高, 理论上可以无限逼近真实值. 由此可以看出: 通过最小包容区域原则评定直线度的误差是最小的. 此外, 本文采用的数据点数一定程度上限制了评定精度, 实际应用中可通过适当增加采样点, 或每轮采样交错选取采样点来进一步提高直线度误差评定精度.
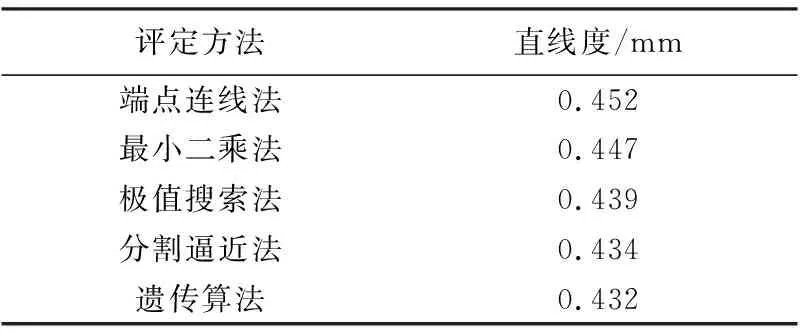
表 2 各算法计算结果
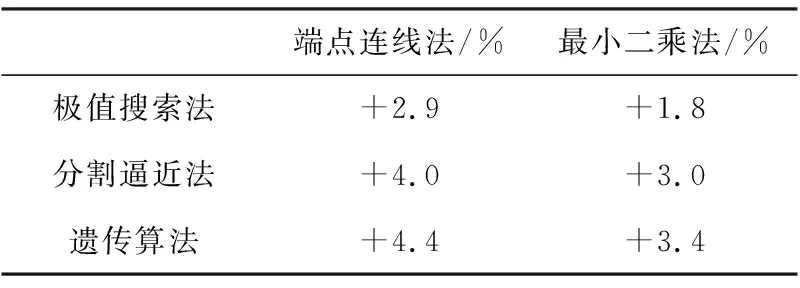
表 3 结果比较
4 结 论
通过研究深孔轴线直线度误差评定方法和进行计算机仿真实验可知: 几种方法均可对深孔直线度误差进行评估, 其中, 最小区域法直线度误差值小精度高, 计算过程较复杂, 但借助计算机程序容易实现, 而端点连线法和最小二乘法精度较低但计算简单. 实际应用中可根据产品对象和精度要求选择合适的评定方法, 或采用多种方法的计算结果进行综合评估.