一种仿生八足机器人的设计与越障仿真
2018-10-11杨晓帅
何 悦,周 鹏,杨晓帅,解 鑫
(西南科技大学 制造科学与工程学院,绵阳 621010)
0 引言
机器人技术的发展是一个国家高科技水平和工业自动化程度的重要标志和体现[1]。多足机器人作为仿生机器人的典型代表,具有丰富的步态和冗余的肢体结构,运动灵活,可靠性高。自20世纪80年代起,国外卡内基梅隆大学在1986年研制出具有简单腿结构的液压驱动四足机器人[2],但是结构简单,也十分笨重。2007年,哈尔滨工业大学的王倩等设计了一款新型六足机器人。该机器人采用舵机驱动,四连杆传动提高稳定性[3]。2011年,唐晶晶[4]等设计出了六足减灾救援仿生机器人的虚拟样机,将虚拟样机技术引入到仿生多足机器人的研制中,对仿生多足机器人的研制提供了新思路。经过不断地发展,仿生多足机器人一方面趋于高负载,高稳定性,高环境适应性方向发展,另一方面也正朝着微型化,智能化方向不断推陈出新,正在不断影响到生活的方方面面。
为了能让机器人更好适应多样化的工作环境和完成更为复杂的任务,本文以蜘蛛为仿生对象,设计了一款结构微型化,可在狭小的环境空间中进行作业的多足仿生机器人。
1 仿生八足机器人的结构设计
1.1 机器人的总体结构设计
蜘蛛头胸部呈十边形,八条足分居两侧,拥有互不干扰的运动空间,对蜘蛛的行动十分有利。基于此仿生原理,仿生多足机器人的躯体也采用十边形结构,这种结构对于仿生机器人而言具有三方面优势,一是机器人腿的根关节与躯体可垂直连接,向外拓展,运动空间增大;二是机器人腿部可对称分布与躯体两侧,增加了机体的稳定性,三是增大了机器人腿部的运动空间可减少机器人的腿部碰撞。

图1 机器人整体原理图
根据自然界中蜘蛛的结构特征以及驱动、传动方式的考虑,确定了基于仿生学原理的仿生多足机器人由躯体和八条腿两部分组成,采用正相对称分布,如图2所示。躯体通过舵机与腿部的根关节连接,躯体由两块正十边形板材上下叠放而成,两板材之间的间隙用于安装舵机和控制电路,顶部板材上可搭载其他传感器或负载。
1.2 机器人的腿部结构设计
仿生多足机器人的腿部结构是从蜘蛛的足的结构中简化、优化产生的,由于其髋关节极短且在实际运动中活动范围有限故此在仿生过程中将其简化股节上,而足在活动中主要起到抓地作用且已经失去自由活动能力所以在设计中将其忽略。简化后的腿部仿生原理图如图3所示。

图2 机器人模型

图3 腿部仿生原理图
由于平行四边形曲柄连杆机构和滑块连杆机构和丝杆连杆机构,回差小,刚性好,可保持特殊位形[18]。连杆机构对于仿生机器人这种短距离的动力传动具备很大的优势。因此选用连杆机构作为机器人关节的传动方式。机器人腿部如图4所示,舵机采用交叉装配,如图5所示。
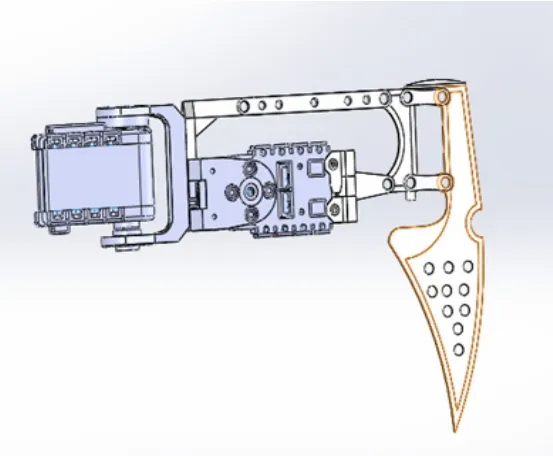
图4 机器人腿部模型

图5 舵机装配方式
2 八足机器人的越障分析与仿真
2.1 仿真理论分析
仿生多足机器人的腿按图6所示分为两组(L1、R1、L3、R3;L2、R2、L4、R4),两组交替完成机器人的支撑和提供前进的驱动。
在本部分内容中,结合模型的复杂程度和精度要求主要采用SolidWorks中的motion分析作为基本分析工具。仿真过程流程图7所示。

图6 机器人腿部分组

图7 仿真过程流程
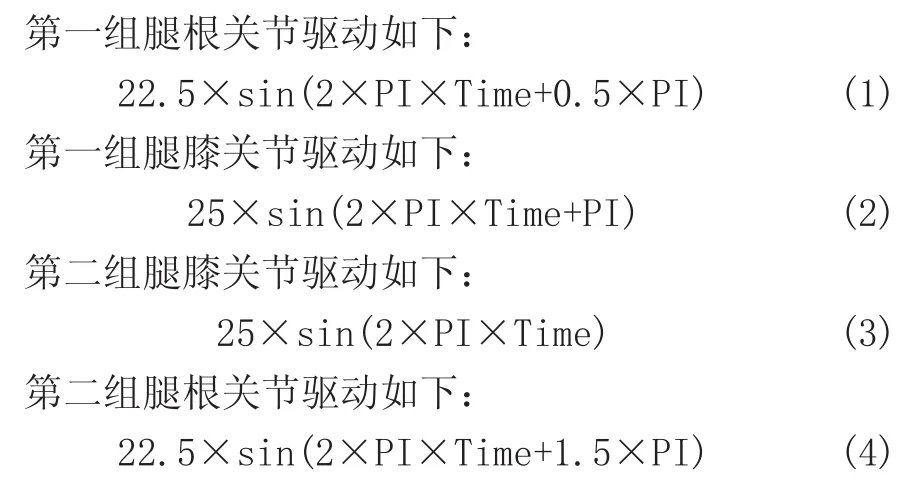
为了使机器人的运动效率足够高,对于根关节舵机的转动幅度应取最大值,对机器人结构进行分析可知,为了使机器人相邻足互不干扰、产生干涉,每条腿的最大转动幅度为45°,即根关节舵机的转动幅度取±22.5°。
此时仿生多足机器人的驱动如下:
2.2 仿真过程
基于仿生多足机器人的结构特性分析可知,仿真多足机器人通过障碍物的方式主要有绕行、跨越同过、爬行通过三种。针对不同的障碍物采用不同的运动方式,对于障碍物周围存在平整环境时,可通过控制机器人的转向和行进,绕过障碍物;对于不可绕行的障碍物又可分为两种,第一,障碍物宽度低于仿生多足机器人运行一个周期的前进量,高度低于仿生多足机器人的跨度时,仿生多足机器人可以采用跨越通行的运动方式;第二,障碍物宽度高度低,机器人不发生倾翻,此时可以采用爬行通过直接通过障碍物。绕行方式结果与平整地面行走类似,此处不再累述。
2.2.1 跨越通行方式越障仿真
仿生多足机器人的越障能力主要体现在两个方面:
1)仿生多足机器人能越过机器人的最大高度;
2)仿生多足机器人能越过障碍的最大宽度。
为了解决这两个问题,首先对直线行走中膝关节转动幅度为±45°的情况进行分析,列出R1腿足尖到坐标原点的线性位移如图8所示;根据图8可知,仿生多足机器人运行一个周期,R1腿的z分量运动范围是5mm~-79mm,由于坐标系原点与躯体底部重合,故为了防止仿生多足机器人躯体底部与障碍物接触,障碍物的最大高度不得超过79mm,由图8可知足从0~79mm的过程中,足尖的x分量变化量约为60mm,取一定误差空间,取能跨越的障碍物宽度为50mm。

图8 R1腿足尖到坐标原点的线性位移
下面通过仿真来验证仿生多足机器人能否通过79mm高,50mm宽的长方体障碍。具体过程如下:
打开膝关节转动幅度为±45°根关节舵机转动幅度为±22.5°的装配体文件,编辑零部件“地面”,切换零部件配置为“最高障碍”,返回装配体;
各关节舵机驱动如下:
L1、L3、R2、R4腿根关节舵机驱动为式(1);
L2、L4、R1、R3腿根关节舵机驱动为式(2);
L1、L3、R1、R3腿膝关节舵机驱动为式(3);
L2、L4、R2、R4腿膝关节舵机驱动为式(4)。
仿真结算完成后结果如图9所示。

图9 机器人质量中心位移图(越障)
2.2.2 爬行通过方式避障仿真

图10 越障过程

图11 障碍物为40.5mm的运动过程
仿生多足机器人要能够通过爬行通过方式通过障碍物,必须要满足任意时刻都要有支撑相、仿生多足机器人不发生倾翻两点,初步估计能保证这两个要求的状态中障碍物高度在50mm以下。本节通过更改障碍物的高度通过仿真过程寻找满足此种运动方式的障碍物最大高度。具体过程如下:
1)打开用于仿真的膝关节转动幅度为±45°根关节舵机转动幅度为±22.5°的装配体文件;
2)编辑零部件“地面”,切换零部件配置为“爬行测试”并编辑障碍物高度为50mm,返回装配体;
3)切换回运动算例界面,运行仿真;
4)分析仿真结果,若仿生多足机器人无法满足要求,则将障碍物高度减少10mm,继续执行仿真,直到达到要求为止。
通过仿真后得出结果为障碍物的最大高度为40.5mm,仿真运动过程图如图11所示。
3 结论
提出了一种新型的仿生八足越障机器人,利用舵机作为原动力,通过连杆式关节连接,结构简单易于控制,中间躯体可以搭载不同设备,应用性强。文中主要对机器人的结构以及越障能力进行了阐述与分析,分析得出理论上机器人能攀爬最大高度为40.5mm的障碍,为多足机器人的结构设计提供了重要的参考价值。
