基于改进的前馈补偿自抗扰控制伺服系统转速特性研究
2018-10-09张文华裘信国
姜 伟,张文华,裘信国,郑 颖
(浙江工业大学 特种装备制造与先进加工技术教育部/浙江省重点实验室,浙江 杭州 310014)
0 引 言
永磁同步电机(PMSM)具有高转矩电流比、效率高等优点。针对伺服系统中转矩脉动大、稳态精度差、转速响应性慢与超调量大等的问题,许多学者提出了不同的控制策略以提高伺服系统转速性能。
刘春强等[1]设计了位置-速度环复合控制的二阶非线性ADRC观测负载扰动,提高抗扰动性能,电流环采用一阶线性ADRC以取代传统PI的方法,提高动态响应速度,取得了较好的控制效果;黄庆等[2]把滑模变结构和自抗扰控制策略相结合,设计滑膜反馈控制率加载到速度环上,提高了转矩特性,降低了转速超调量;LI Jie等[3]将电机模型设计成已知部分和未知部分,并把已知量补偿到ADRC中去,提高了转速估计精度,实现了转速性能提升;韩晔等[4]将模糊控制与自抗扰结合对参数的值在线实时修正,取得了一定效果,但控制算法比较复杂,运算量大;薛薇等[5]将积分分离思想引入滑模控制器中,作用于速度环上,采用指数趋近律来抑制系统抖动,提升了速度稳定性;张巍等[6]将单神经元PID作用于速度环,结合前馈补偿思想和模糊控制对负载转矩施加前馈补偿,改善了系统抗扰动能力和平稳性。
为提升永磁同步电机的转速性能,在常规ADRC控制策略基础上[7-9],本文将提出基于改进的前馈补偿自抗扰控制策略,引入变比例积分[10-11]的专家PID控制[12],实现系统快速调节。
1 表贴式永磁电机数学模型
永磁同步电机经Clark变换和Park变换后,在d-q坐标系下的方程如下:
(1)电流方程为:
(1)
(2)电压方程为:
(2)
(3)磁链方程为:
(3)
(4)电机输出电磁转矩为:
(4)
(5)电机运动方程为:
(5)
式中:iA,iB,iC—定子电流;id,ud—直轴电流和电压;和iq,uq—交轴电流和电压;θr—转子位置角;ψd,ψq—直轴磁链和交轴磁链;Ld,Lq—直轴和交轴电感;ψf—同步磁链;J—转动惯量;TL—负载转矩;B—摩擦系数。
其中:J、TL、B为系统扰动。
为提升系统转速性能,第一要抑制系统扰动,第二要控制电机的电磁转矩稳定输出,无转矩脉动,通过控制iq和id的不同组合来控制转矩。由式(4,5)式知:实现伺服系统转速和转矩的高性能的控制问题,转变为对转速环和电流环的控制策略的设计。
2 转速环设计
2.1 改进的自抗扰控制策略
由式(4,5)建立伺服系统二阶自抗扰观测器如下:
(7)
其中:
(8)
式中:ωr—实际转速值;Z1—转速状态估计;Z2—系统总扰动观测值;β1,β2—观测器系数;α1,α2—0-1之间的跟踪因子;δ—误差线性区间宽度;b0—取1/J;u—扰动补偿量。
2.2 β1和β2的修正函数
为了提高转速观测精度,须实时修正其参数β1和β2的值,本文设计了β1和β2的修正函数。
令:
β1fal(e,α1,δ)=β10fal(e,α1,δ)+k1fal(e,α1,δ)
(9)
式中:β10—修正基础值,取值为0.05β1;k1—修正因子,根据误差值的不同实时修正。
修正函数如下:
(10)
令:
β2fal(e,α2,δ)=β20fal(e,α2,δ)+k2fal(e,α2,δ)
(11)
式中:β20—修正基础值,取值为0.1β2;k2—修正因子,根据误差值的不同实时修正。
修正函数如下:
(12)
设β1和β2的给定值分别为1.3和1.2,通过误差值来实时修正参数β1和β2的值提高观测精度。
(13)
非线性参数β3的值影响扰动补偿及系统反馈误差。本文也将引入修正函数对非线性参数在线实时修正。
令:
β3fal(e1,α3,δ)=β30fal(e,α1,δ)+k3fal(e,α1,δ)
(14)
式中:β30—修正基础值,取值为0.15β3;k3—修正因子,取β3的值为0.9。
根据给定转速和输出转速误差的不同实时修正。修正函数如下:
(15)
2.3 扰动补偿
对系统输出量进行实时动态补偿,一方面补偿扰动变化对转速的影响,一方面补偿扰动对转矩的影响。本文在常规ADRC基础上加入加速度前馈补偿以提升转速响应速度。引入加速度a前馈扰动补偿如下:
(16)
(17)
式中:kα—加速度前馈系数;b—前馈偏移量。
(18)
由此得出改进后的ADRC的转速控制图如图1所示。

图1 改进的ADRC控制图
3 电流环设计
由式(4)知:对转矩的控制转化为对iq和id电流的组合控制,这里取id=0。本文在PID的基础上对电流环进行设计,采用变比例-积分控制,同时引入专家控制思想实时调节比例和积分系数,防止积分饱和以及转速超调。
3.1 变比例-积分的专家控制
令:
(19)
其中:

将比例和积分系数分离,令:
kpe(k)=kp0e(k)+kαpe(k)
(20)
式中:kp0—比例常数;kαp—变比例系数,取值取决于误差值和阀值的比较。
令:
(21)
式中:ki0—积分常数;kβi—积分系数,取值取决于误差值和阀值的比较。

γ∈[0 0.01],kpα=0,kiβ=0.57;
γ∈[0.01 0.02],kpα=0.1,kiβ=0.49;
γ∈[0.02 0.05],kpα=0.15,kiβ=0.41;
γ∈[0.05 0.08],kpα=0.2,kiβ=0.35;
γ∈[0.08 0.1],kpα=0.5,kiβ=0.26;
γ∈[0.1 0.3],kpα=0.9,kiβ=0.1;
γ∈[0.3 0.5],kpα=1.3,kiβ=0.05;
γ∈[0.5 0.1],kpα=1.5,kiβ=0;
本研究根据设定的阀值和Δe(k)的变化趋势,判断相对误差γ所在阀值区间,依据专家控制思想,根据相对误差和阀值的比较及误差变化情况设计专家规则,选取最佳的比例和积分系数。
3.2 专家PID规则
(1)设γ>mmax,说明误差的绝对值很大,应加大比例作用,以迅速降低误差;
(2)γ>mmed,Δe(k)>0,此时误差值中等,但误差有增大的趋势,此时考虑比例作用作用增强,积分减弱;Δe(k)<0时,误差有减弱的趋势,此时比例作用作用减弱,积分增强,以降低误差,防止超调;
(3)γ>mmin,说明误差值很小,此时应该取较小的比例项而增大较大的积分作用项防止超调,提高稳态精度。
以相对误差γ所在阀值区间[0.05 0.08]为例,当Δe(k)=0时,kpα取0.2,kiβ取0.35;当Δe(k)>0时,误差值有增大的趋势,此时kpα取0.5,kiβ取0.26,使系统快速响应,降低误差;当Δe(k)<0时,误差值有减小的趋势,此时kpa取0.15,kiβ取0.35,防止系统出现超调。
基于专家控制思想,当相对误差γ落在其他区间时,本研究选取最佳的比例和积分系数调节系统输出量。
基于改进的前馈补偿自抗扰控制策略的系统图如图2所示。

图2 改进的控制策略的结构图
4 仿真结果分析
电机具体参数为:电机额定电压为36 V,额定转矩为0.9 N·m,额定转速为3 000 r/min,转子转动惯量为0.019 kg·m2,定子电阻为0.265 Ω,极对数为4,交轴电感为3.2 mH,直轴电感为3.2 mH。
4.1 改进后的ADRC控制策略转速性能验证
给定转速为500 r/min,无负载时,得到两种控制策略下转速特性图如图(3,4)所示。
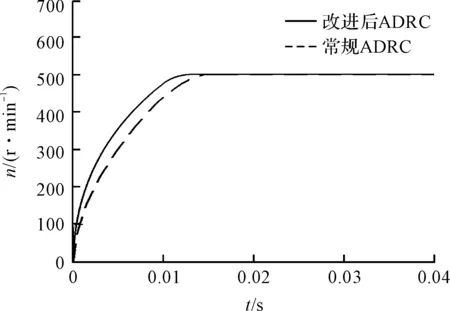
图3 转速为500 r/min时响应波形图

图4 转速为500 r/min时转速误差波动图
由图3可知:改进后ADRC能快速响应到给定转速,经过0.011 s即达到稳定运行,改进后的ESO观测精度更高,降低了误差。
图4中可知:改进后ADRC转速误差为0.28 r/min。由此得出,改进后的ADRC控制策略降低了观测误差。
4.2 改进后的ADRC控制策略转矩性能验证
设给定转速为500 r/min时,负载转矩为0.15 N·m时,转矩响应波形如图5所示。

图5 转矩响应波形图
可以看出:改进后的ADRC转矩响应速度更快,到达稳态时间为0.01 s;同时转矩的最大的峰值小于常规下ADRC峰值,降低了冲击响应,转矩脉动小,保证了转速的快响应和更高的稳态运行。
4.3 改进后的ADRC控制策略抗扰动性能验证
给定系统稳定转速为1 000 r/min,在0.8 s时突加0.5 N·m的负载转矩,转速抗扰动波形如图6所示。

图6 负载转矩突加时转速响应图
可以看出:改进后的ADRC控制策略,转速降低了5 r/min,经过0.013 s恢复稳态。可见,改进后的ADRC控制策略具有更强的抗扰动性,鲁棒性好。
5 实验验证
本文以stm32作为控制板的主芯片,完成实验的硬件设计。电路整体设计如图7所示。

图7 系统整体电路图
整个电路主要包括控制电路、驱动电路、反馈采集电路、故障保护以及通讯总线,共同组成PMSM的硬件电路,下面就主要的硬件电路作分析。
5.1 主要硬件设计
本研究选用IR2101功率驱动芯片,把主芯片3.3 V转换成20 V电压。选用STP75NF75功率器件,设计三相全桥逆变电路,母线电压加载36 V,经过空间脉宽调制算法输出互补脉冲,把直流转换成驱动电机的交流电压。
矢量控制最重要的就是完成坐标的变换,把交流三相电流变换成旋转的直流电,本研究选取ACS712电流采样芯片检测三相电流。最后在测控机上完成性能测试。
5.2 实验结果分析
本文在实验室的测控机上完成改进前后的控制策略电机性能测试,设定参数值和的给定值分别为1.3和1.2,设定启动转速为500 r/min,得到两种控制策略下的转速实验波形如图8所示。

图8 转速为500 r/min实验波形图
由启动波形实验图知,改进后的ADRC到达稳态时间为0.02 s,常规ADRC的稳态时间为0.03 s,稳态误差较小。由实验图能够验证理论分析,提高了系统响应时间。
在转矩突变下,设定转速为900 r/min,测得两种控制策略下转速抗扰动如图9所示。

图9 转速为900 r/min抗扰动波形图
在转矩由0突加为0.2 N·m,由0.2 N·m突加为0.3 N·m,由0.3 N·m突加为0.4 N·m时,改进的ADRC转速分别降低了5 r/min,3 r/min和6 r/min,常规ADRC转速分别降低了8 r/min,6 r/min和10 r/min。很明显,改进后的ADRC抗扰动性更强。
本研究保持功率一定,测得在堵转下,两种控制策略下的转速-转矩波形如图10所示。

图10 堵转下转速-转矩波形图
从实验前后对比中,验证了改进后控制策略的具有更好的控制性能,转速响应性更快、稳态性更优越、抗扰动性能更强。
6 结束语
本研究通过改进前馈补偿自抗扰控制系统来改善伺服系统,设计了修正函数实时修正其观测值,降低了观测误差,并给予加速度前馈补偿,提升了抗扰动性和稳态特性,提高了观测精度和转速响应性;采用变比例-积分的专家PID控制对电流进行调节,实时选取比例和积分项的值,减小转矩脉动,使转矩输出稳定,进一步提升了转速特性,使系统具有更好的鲁棒性。
仿真和实验表明:改进后控制策略具有更好的启动特性,抗扰动性能更好。
