基于专用短程通信技术的车路协同系统研究及应用
2018-10-08唐风敏王文扬王梦丹
郭 蓬,蔡 聪,戎 辉,唐风敏,王文扬,王梦丹
(1.天津大学,天津 300072;2.中国汽车技术研究中心有限公司,天津 300300;3.河北工业大学,天津 300222)
车路协同系统(Cooperative Vehicle Infrastructure System,CVIS)以先进的专用短程通信技术(Dedicated Short Range Communication,DSRC)为基础,融合新一代高精度定位技术和先进互联网技术,实现了车与车(V2V)、车与路(V2I)、车与人(V2P)之间的动态实时信息交互。在全方位动态交通信息采集与融合的基础之上,车路协同系统实现了车辆主动驾驶安全预警和控制以及道路交通协同管理,充分实现了人、车、路的有效协同,从而提高驾驶安全性,减少城市交通拥堵、提升交通出行品质、提高城市交通管理部门管理成效。本文基于真实CVIS场景的建立,分析说明了该系统的组成和架构,并对系统中不同场景的实现和关键技术进行了阐述。
1 车路协同系统介绍
1.1 系统架构
车路协同系统的总体架构说明:通过将专用短程通信设备布设于自动驾驶车辆或者智能网联车辆,以及路侧基础设施上,以实现车路的实时通信,从而将整个交通系统中的人、车、路等各方面的构成部分统一于一个整体。然后,对于交通系统中的红绿灯、摄像头、可变情报板等系统的数据,在人、车、路所构成的整个系统中进行实时信息传输与交换,为此,研发配套了短程通信与车载网络。而测试、调试软件则应用于对整个通信系统所产生的数据进行检测、处理、分析,并且将所获的结果应用于对整个通信系统的提高和改善。并且在此基础上构成了一个车路协同系统,这个系统基本上包括了RSU(Road Side Unit)、OBU(On Board Unit)、红绿灯、可变情报板、交换机、摄像头、网络设备等以及开发和测试软件,可以在室外和实验室范围内对所设计的整个系统进行模拟和示范,以达到总体的展示效果。
1.2 系统组成
车路协同系统主要包括3个部分,分别是智能网联汽车、路侧设备和后台管理系统,并且预留了可以提供拓展的功能,比如后续会实现更多场景以及车车通信。目前系统中实现的功能主要包括:基于红绿灯自动调节的车辆优先通行,基于智能情报板的施工信息警示以及基于智能摄像头的物体识别。物体识别具体包括对于运动物体的识别(主要用于模拟交叉路口的监控摄像头的功能)和对于静止物体的识别(主要用于模拟智能停车场的空闲车位的识别功能),并且将相应的数据以信号的形式通过专用短程通信设备以及配套通信软件进行车路之间的信息传输和交互,整个车路协同系统构成如图1所示。
车路协同系统中的实验车辆,是一款专门为该系统开发的智能网联观光车,车身搭载多种传感器以及OBU等通信设备,不仅能够满足无人驾驶的需要,同时还能实现后台管理系统的远程监控管理、手机APP的实时调度以及V2X

图1 车路协同系统的构成
通信等多元化功能,车辆外型如图2所示。

图2 智能网联观光车
车路协同系统中的路侧设备,采用可移动式的交通设备,并装有RSU等通信设备,可以实现车辆和路侧设备之间的通信,如图3所示。

图3 路侧设备
另外,车路协同系统还专门开发了一款APP,作为车载PAD的显示内容,方便更加直观地展示车路协同系统中不同场景的功能,如图4所示。

图4 车路协同系统APP
1.3 运行流程
系统运行流程主要是基于专用短程通信设备和配套的通信软件,实现不同交通参与者之间的信息交互和信息传输,使之构成一个整体,并且对于这个过程中产生的数据,会反馈到测试、调试软件进行进一步的处理,如图5所示。
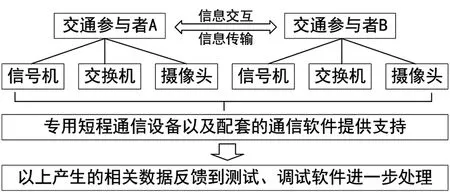
图5 系统运行流程示意图
2 场景介绍
车路协同系统目前包括4个测试场景:行人识别与躲避、红绿灯自动调节、施工信息警示和停车位检测,见表1。

表1 车路协同系统场景
2.1 行人识别与躲避
车辆转向遇到横穿公路的行人,由于路口建筑物的遮挡形成了NLOS(Not Line of Sight)场景,所以采用视频检测的识别方式和DSRC的通信方式。
路口处的摄像头监控路口是否有行人通过,并通过RSU实时广播当前路口的行人信息,OBU收到该路口有行人通过的信息后,车载平板显示警示信息,智能网联车辆自动采取减速或制动避让行人,避免发生碰撞的危险,如图6所示。
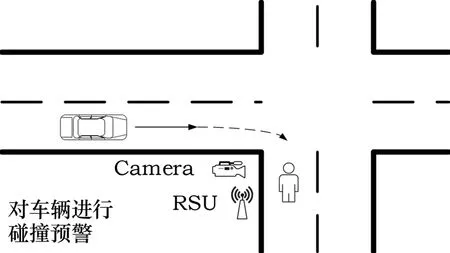
图6 行人识别与躲避场景
相较于目前普遍依靠无人车上的摄像头和雷达来检测行人,本文中采用的方案充分利用了智能网联汽车的优势,基于DSRC技术实现了车路协同,使车辆在一些NLOS场景中也能很好地检测到规划路径上的行人,而且行人不需要佩戴相关的通信设备,取而代之的是目前更为成熟的视频识别技术,可靠性更高,成本也更加低廉。
2.2 红绿灯自动调节
高优先路权使用车辆(如执勤车、救护车等)通过OBU发送应急通过路口信息给红绿灯,红绿灯通过RSU收到控制指令变换绿灯配时和相位,实现高优先权车辆优先通行,确保其快速通过路口,如图7所示。
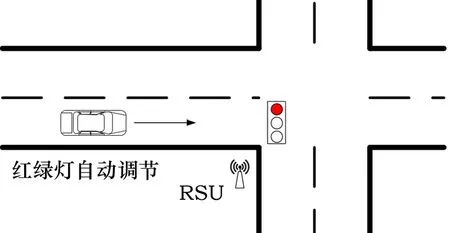
图7 红绿灯自动调节场景
目前车路协同系统中和红绿灯相关的场景主要是以绿波车速引导为主,OBU接收到红绿灯的配时和相位信息,给予驾驶员合适的建议车速区间,确保车辆能够经济、舒适地(不需要停车等待)通过红绿灯路口。本文中的方案则是以车辆为主导,不需要车辆来适应红绿灯的相位,而是红绿灯更改相位配合车辆的行驶,相比之下效率更高,驾乘体验更好。而且可以更改不同车辆的优先路权,确保执勤车、救护车等车辆有较高的优先路权,确保其快速通过。
2.3 施工信息警示
当前方道路施工时,可变情报板通过RSU向周边广播道路施工警示信息,提示周围车辆及时减速避让,避免发生事故。智能网联车辆OBU接收到RSU发来的广播消息后,根据信息的安全级别显示警示信息,自动减速避让,避免可能发生的交通事故,如图8所示。
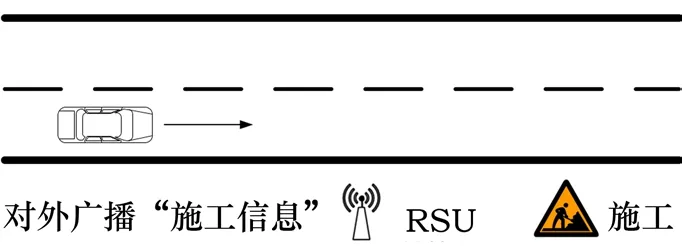
图8 施工信息警示场景
现有的施工信息警示牌受距离和NLOS场景限制较大,本文中采用的方案通过RSU将施工信息广播给周围通信范围之内的车辆,车辆根据各自的路径规划提前做出是否需要减速避让的判断,在施工警示牌进入视线范围之前或者一些NLOS场景中都能起到很好的效果。
2.4 停车位检测
通过摄像头实时监控停车位信息,并将停车位信息通过RSU广播给周围车辆,车辆OBU接收到信息后,车载平板显示停车位占用情况和空余停车位,如图9所示。

图9 停车位检测场景
目前应用较多的超声波停车位检测器成本较高,而且装在室外露天停车位上容易发生损坏,本文中采用的方案可以基于停车位原有的监控摄像头,加装嵌入式算法处理模块和RSU盒子,充分利用DSRC通信的优点,将车位信息实时广播给周围车辆。
3 场景实现
3.1 行人识别与躲避
路口处的摄像头监控路口是否有行人通过,通过网线将视频画面实时传送给算法处理模块,算法处理模块通过行人检测算法判断路口是否有行人通过(图10),并通过RSU实时广播当前路口的行人信息,并在报文中添加摄像头的ID号,智能网联车辆根据自身的路径规划,OBU接收带有即将通过路口的摄像头ID号的报文,并输出到工控机,控制车载平板显示警示信息,智能网联车辆自动减速或制动避让行人,避免发生碰撞的危险。行人识别与躲避业务流程如图11所示,流程说明见表2。
3.2 红绿灯自动调节
高优先路权使用车辆(如执勤车、救护车等)行驶到路口附近,通过OBU发送控制指令给RSU,RSU收到控制指令后输出给红绿灯控制器,红绿灯变换配时和相位,更改为绿灯常亮,实现高优先权车辆优先通行,确保其快速通过路口。红绿灯自动调节业务流程如图12所示,流程说明见表3。
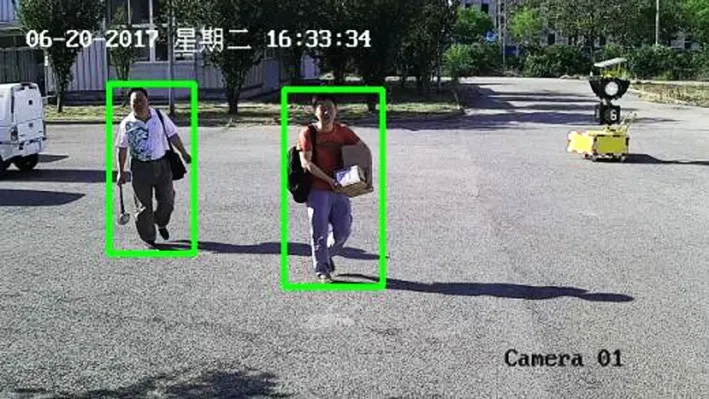
图10 行人检测结果
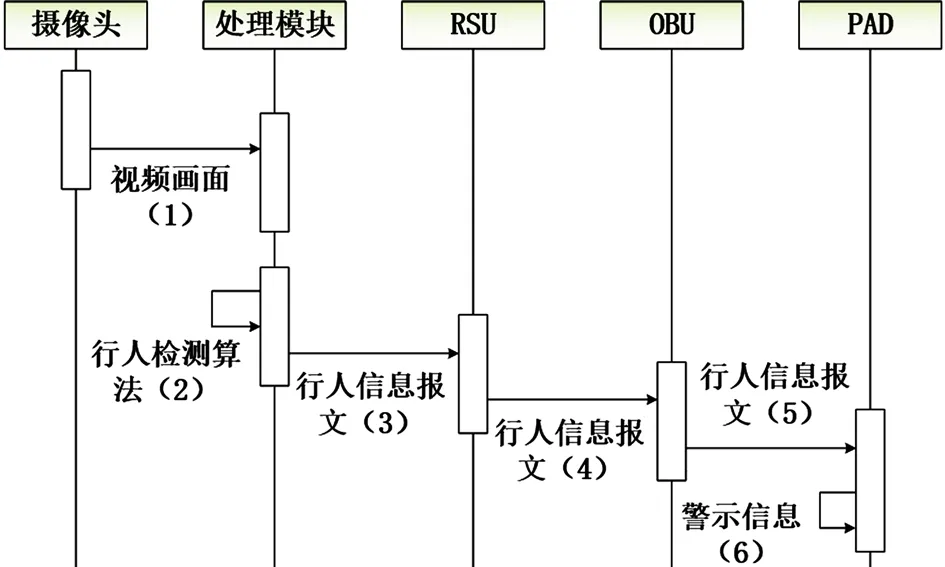
图11 行人识别与躲避业务流程
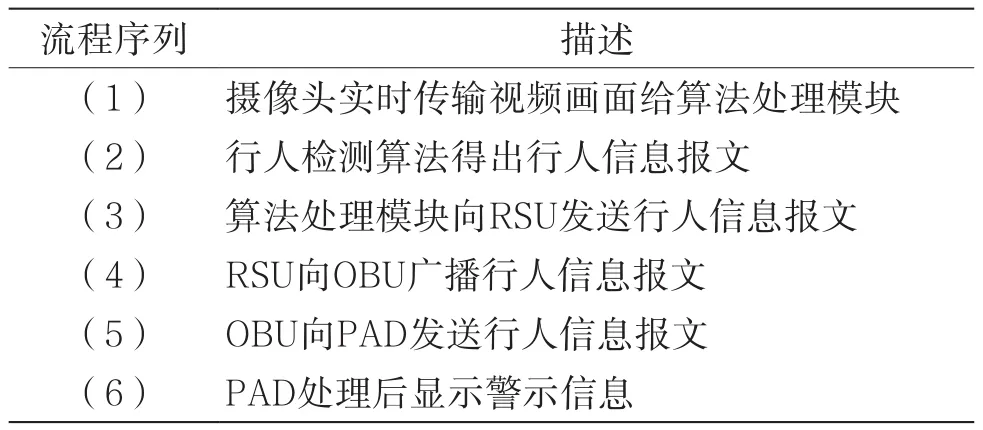
表2 行人识别与躲避流程说明

图12 红绿灯自动调节业务流程
3.3 施工信息警示
后台控制中心根据道路施工信息,远程更改路侧可变情报板文字信息,可变情报板通过RSU广播可变情报板上警示的施工信息,并在报文中添加可变情报板的ID号,附近车辆通过OBU接收到施工信息后,通过ID号判断与施工地点的相对位置,车载平板显示可变情报板上的施工信息,智能网联车辆根据当前路径规划和与施工地点的相对位置,自动执行减速避让或更改路径规划等操作,避免可能发生的交通事故。施工信息警示业务流程如图13所示,流程说明见表4。
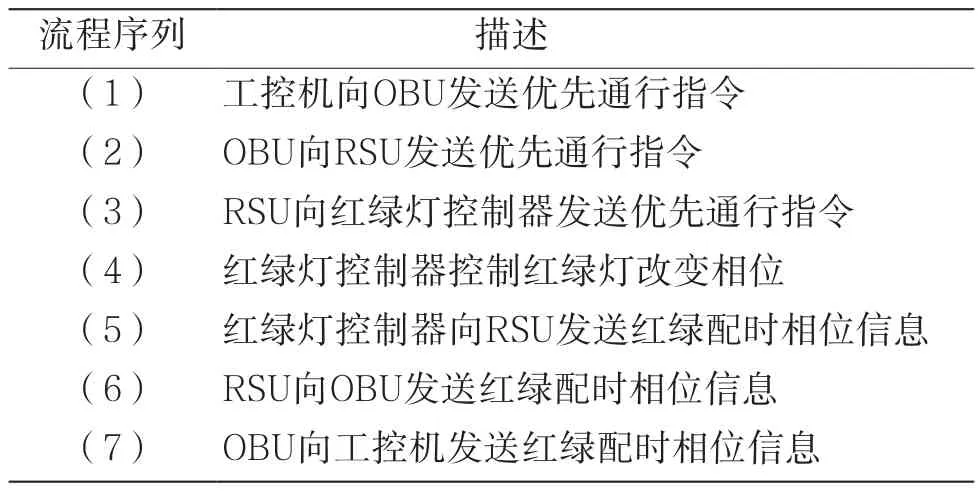
表3 红绿灯自动调节流程说明
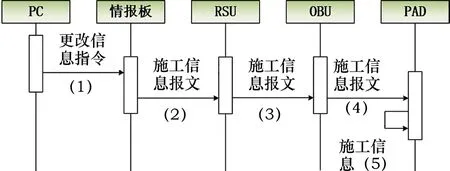
图13 施工信息警示业务流程

表4 施工信息警示流程说明
3.4 停车位检测
停车场摄像头监控停车位信息,通过网线将视频画面实时传送给算法处理模块,算法处理模块通过静态目标识别算法判断停车位是否被占用,并通过RSU实时广播当前停车位信息,OBU接收停车位信息在车载平板上实时动态显示停车位信息。停车位检测业务流程如图14所示,流程说明见表5。

图14 停车位检测业务流程
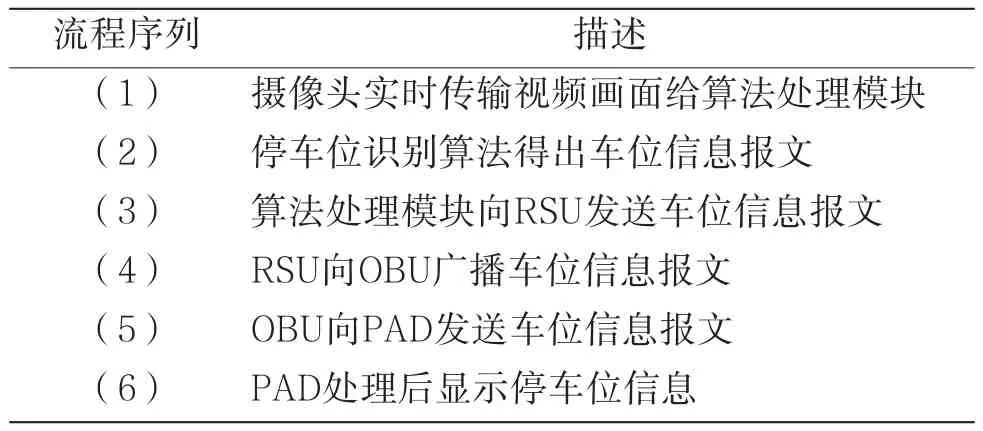
表5 停车位检测流程说明
4 结语
发展智能网联汽车,建立智能网联汽车的测试评价体系,针对智能网联汽车进行实车道路测试验证,都需要先在开放测试道路和封闭测试区内模拟实际的道路场景进行实车测试。目前国内智能网联示范区的建设才刚刚起步,多数测试场景都没有将无人驾驶和“网联”很好地结合起来,实现真正意义上的车路协同。而有关车路协同系统的研究也刚刚起步,多数尚处于跟踪调研和理论阶段,缺乏深入的研究并应用到实际。
本文基于专用短程通信技术,开发了一款专门用于车路协同的RSU和OBU盒子,构建了4个具有特色的车路协同场景,并为此研发了一款智能网联汽车进行实车验证,开发了一款移动端APP用于车载端演示,实际验证了本文提出的车路协同系统的可行性。文章中一共提出了4个场景,其中行人识别与躲避场景,利用DSRC技术实现路侧摄像头和车辆的信息共享,解决了无人车无法检测到NLOS场景中行人横穿马路的难题;红绿灯自动调节场景,改变了一贯以路为主导的现状,实现了以车位主导,大幅提高通行效率的飞跃式改进;施工信息警示场景,让车辆装上了“千里眼”和“顺风耳”,能够发现远距离的交通异常;停车位检测场景,通过开发视频检测算法,大大缓解了找停车位难的问题。
本文提出的这些场景,不仅可以服务于未来智能网联示范区的建设和智能网联汽车的发展,起到示范作用,对于车路协同领域的深入研究,也具有一定的参考价值。