空气中声速自动测量系统
2018-09-29刘永智解立强梁盛德
刘永智,解立强,梁盛德,2
(1.甘肃民族师范学院 物理与水电工程系,甘肃 合作 747000;2.南京大学 声学研究所 近代声学教育部重点实验室,江苏 南京 210023)
声速是描述声波在介质中传播特性的物理量,声音本质上是一种波. 声速测量实验是大学物理实验教学中综合性较强的内容,声速测量常用的方法有共振干涉法和相位比较法[1]. 图1为实验装置示意图,S1是发射端,由压电陶瓷超声换能器向外发射超声波,另一只压电陶瓷超声换能器S2作为接收端,接收声音压强信号,波速v、波长λ和频率f之间存在v=λf的关系,因此可以通过测定声波的波长λ和频率f来求得声速v. 在测量中接收端S2的移动和声波在发射端S1与接收端S2间多次反射叠加的结果及声波在空气中的衰减、两换能器界面的反射能量损耗、半波损失不影响测量结果[2],而介质的特性不同,声速的大小不同. 针对大学物理实验中测量空气中的声速实验时,幅度最大值或示波器上相位角不易准确判断及空气的温度、压强、湿度特性对声速也有影响等问题,设计了自动测量空气中声速值的实验装置.
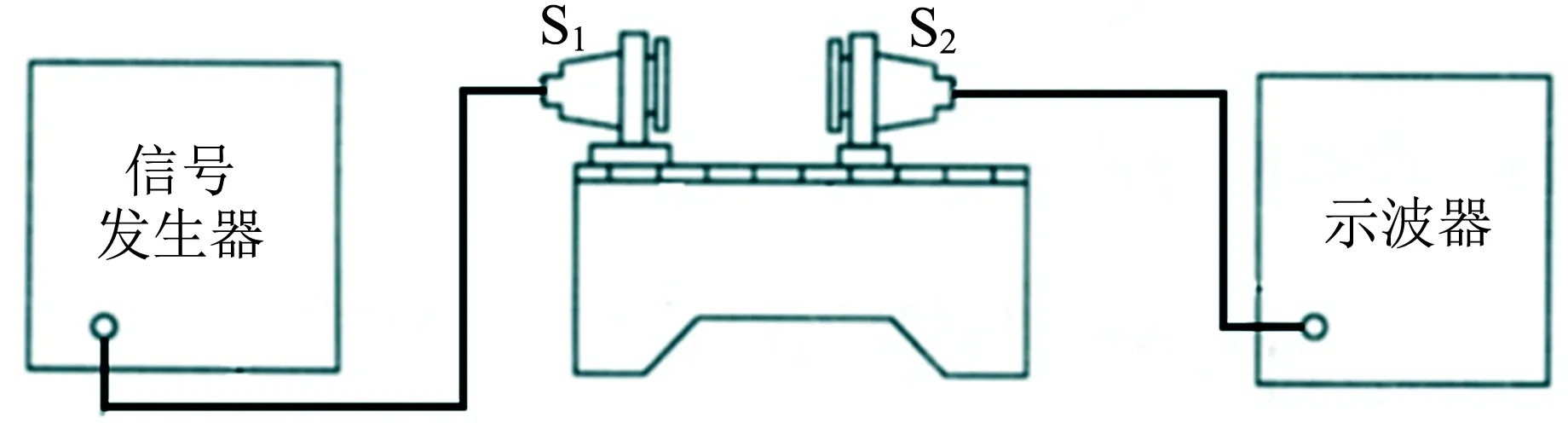
图1 声速测量实验装置图
1 系统设计
1.1 设计原理
声波在空气中传播时,声速v与温度T、压强p的关系[3]为
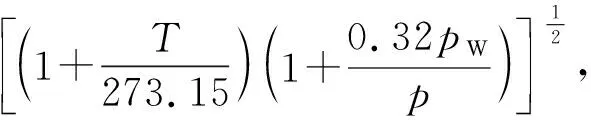
(1)
其中,pW为相对湿度与对应温度饱和蒸气压[4]的乘积.
1.2 系统硬件设计
本文设计的空气中声速自动测量电子装置结构原理如图2所示. 选用低功耗STC12C5A60S2为核心处理器、高精度DHT11为数字温/湿度传感器[5]、BMP180为数字压力数据采集传感器[6]、液晶显示器为LCD12864;采用DC5V进行供电,而系统主要使用3.3 V电源,故选用ASM1117-3.3 V进行电源转换并提供给BMP180和DHT11元件;选用STC12C5A60S2 处理器为主控制器进行系统总体控制,选用BMP180和DHT11传感器,在STC12C5A60S2 的控制下,传感器内部的测量部分单元进行当前气压、温度、湿度测量,测量所得到的数据经过内部ADC转换为数字信号并加以修正,修正后的结果通过I2C数据总线和STC12C5A60S2 进行通信;然后系统软件将所得到的压力p、温度T和湿度H,经式(1)计算出当前声速值, 并将数据显示在LCD12864液晶显示器上.
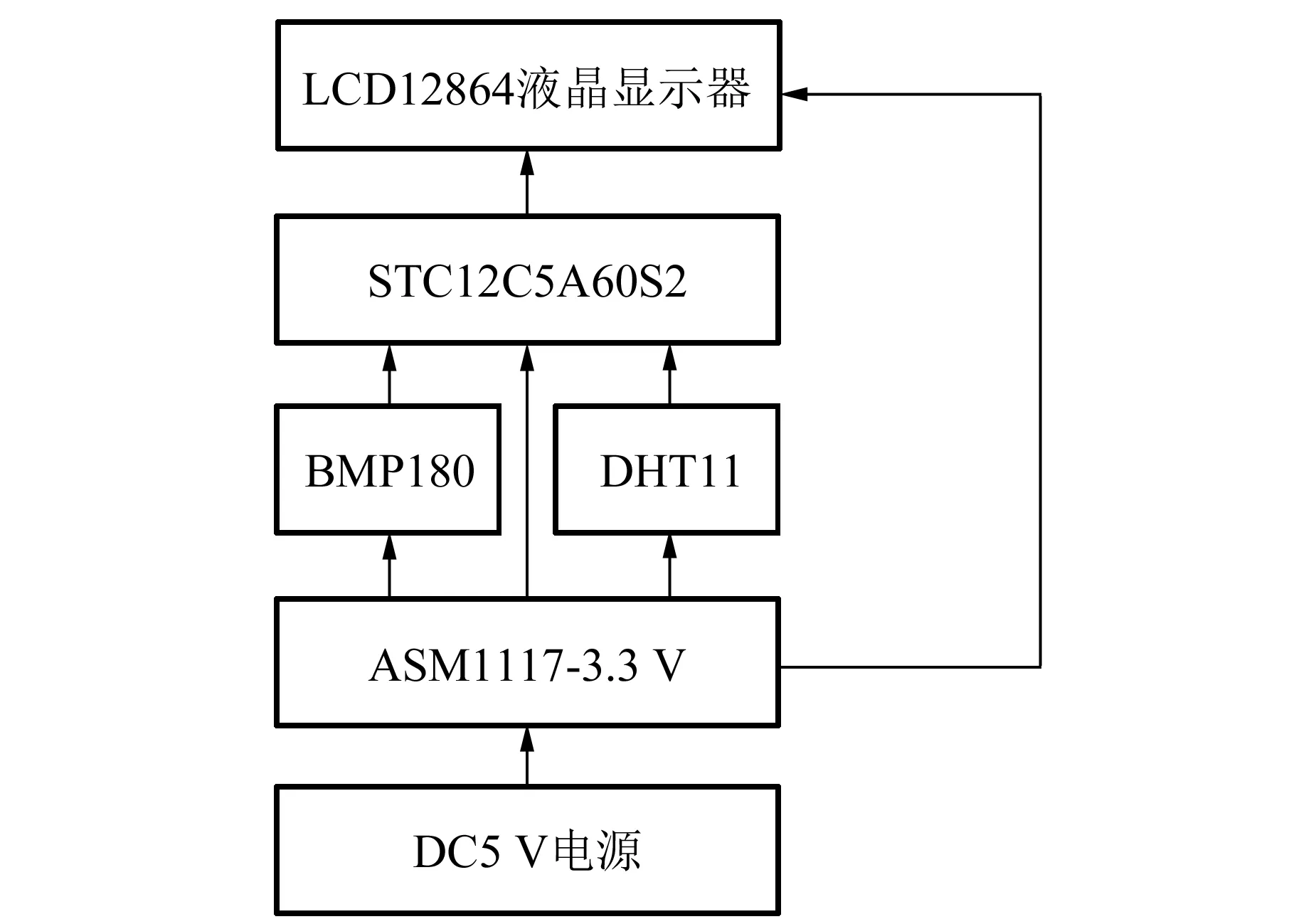
图2 系统结构示意图
1.2.1 供电、下载、串口模块通信
由于需要采用DC5V或充电宝进行供电,但BMP180和DHT11的供电电压一般为3.3 V,故需要AMS1117-3.3 V稳压器进行电源转换,将DC5V或充电宝电压转换为稳定的3.3 V电压供给BMP180和DHT11设备. 电源转换硬件基本原理如图3 所示.
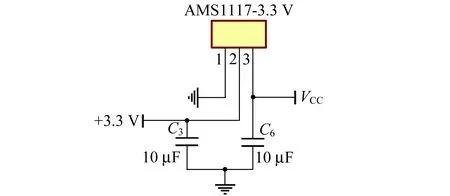
图3 电压转换电路
由于软件系统需要调试和修改程序,故预留USB串口通信接口以及和其他设备进行通信,图4为供电、下载、串口模块通信中采用CH340芯片做数据转换,STC12C5A60S2 的引脚P3.1为TXD,P3.0为RXD引脚,2 个引脚分别接入CH340的2和3引脚的TXD和RXD连接即可.
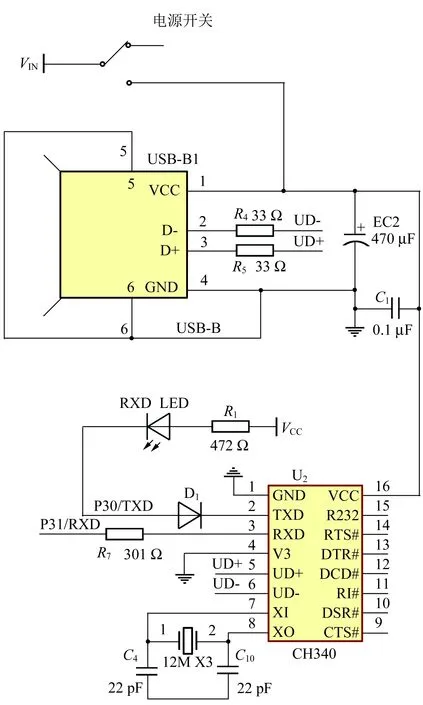
图4 供电、下载、串口模块通信
1.2.2 系统设计电路总图
系统设计电路总图如图5所示. BMP180 压力传感器通过I2C总线和STC12C5A60S2 微处理器连接,其连接只需通过SCL 时钟线和SDA数据线2 根线连接在STC12C5A60S2的2个引脚P1.0和P1.1即可,DHT11温度/湿度传感器通过DATA数据线连接在STC12C5A60S2的P3.2引脚; LCD12864液晶显示器引脚DB0~DB7与STC12C5A60S2微处理器的P0.0~P0.7依次连接;LCD12864液晶显示器引脚RST与STC12C5A60S2微处理器的引脚P2.3连接;LCD12864液晶显示器引脚Vout连接10 kΩ滑动变阻器调节LCD12864液晶显示器的背光,滑动端与液晶显示器的引脚Vo连接;LCD12864液晶显示器的引脚RS,R/W,E与STC12C5A60S2微处理器的引脚P2.4,P2.5,P2.6分别连接;实物图如图6所示.
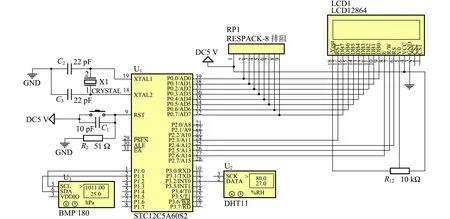
图5 系统电路设计总图
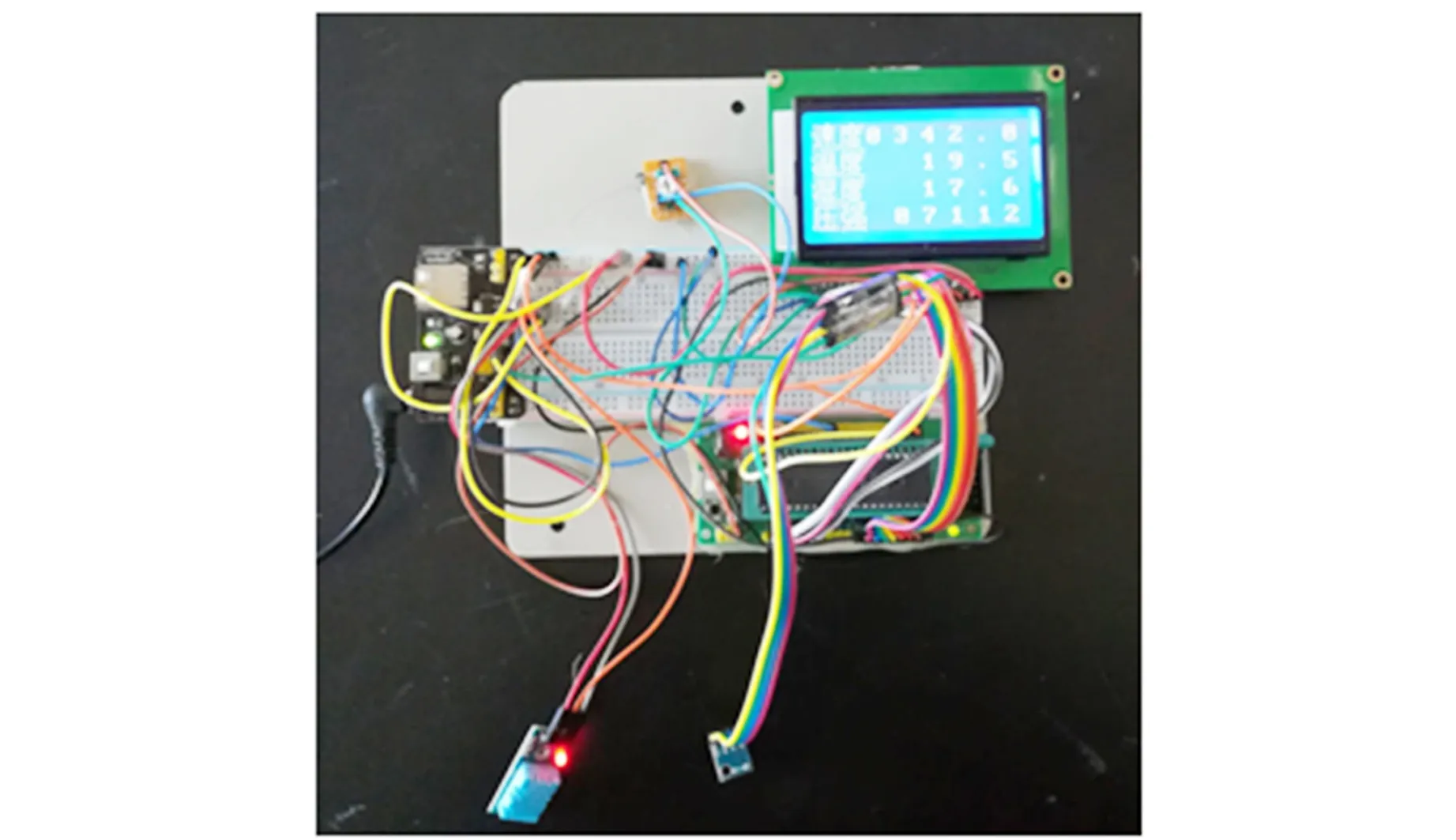
图6 系统设计实物图
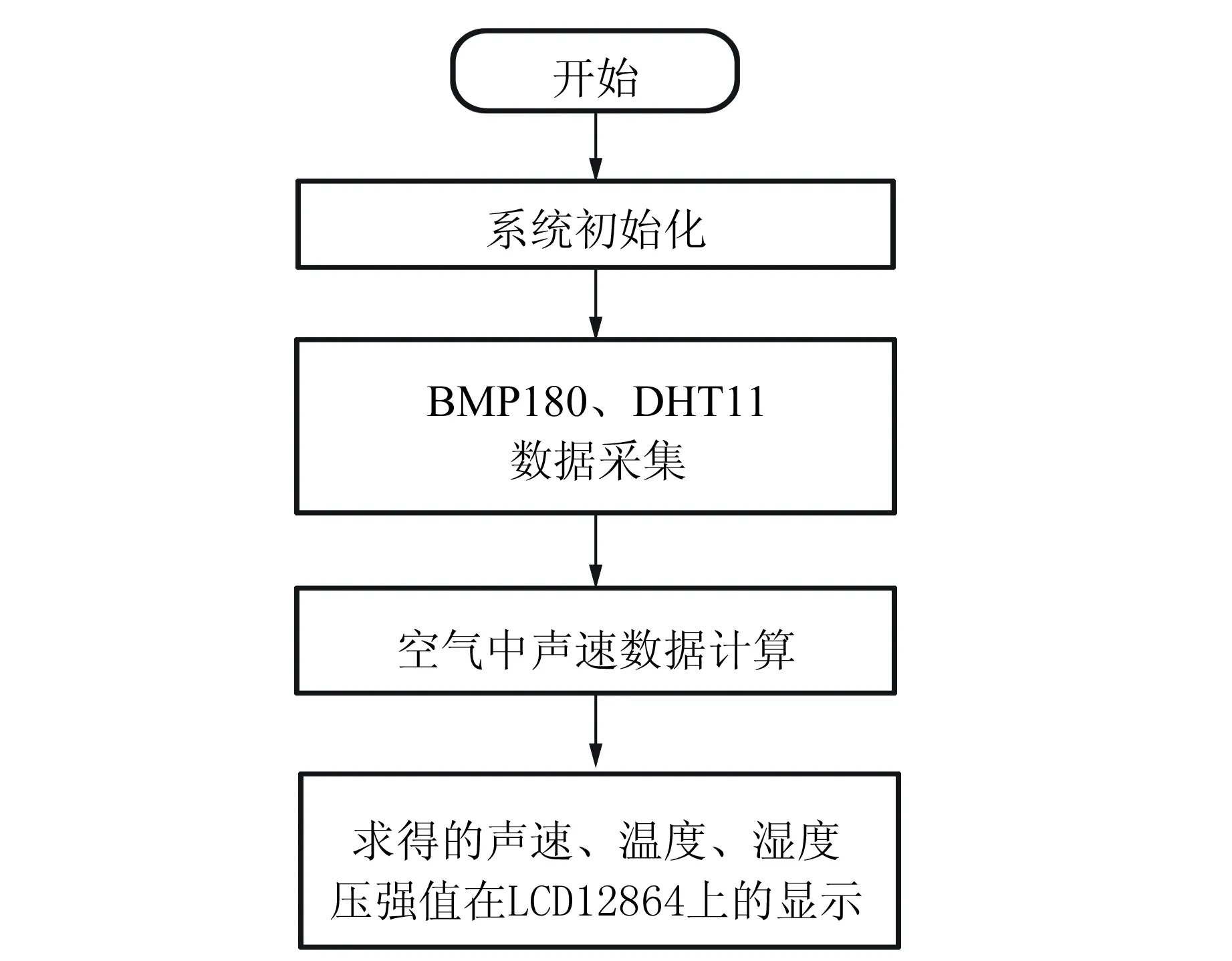
图7 系统主要流程图
1.3 系统软件设计
系统主要流程如图7所示.
软件部分设计采用C语言编程,主要包括STC12C5A60S2主控程序部分,LCD12864液晶显示部分,BMP180和DHT11的I2C数据通信部分、空气中声速值计算部分等.
2 实验数据
2.1 使用SW-1实验装置测声速
为了减少测量驻波距离时的误差,计算中采用:
(2)
其中,x0为信号强度产生极大值初位置,xi为信号强度产生极大值末位置,n为驻波个数. 依据波速v、波长λ和频率f之间关系
v=λf
(3)
计算声速值见表1.
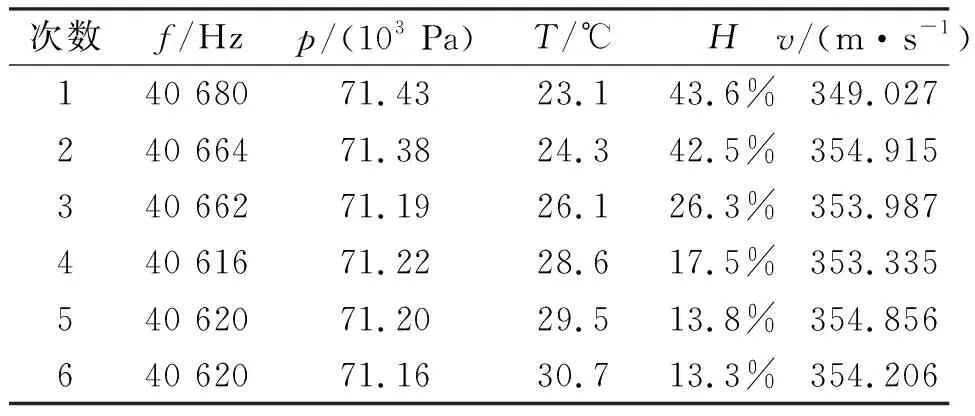
表1 驻波法测量声速的数据
2.2 电子装置测声速
采用电子装置测量声速的测试结果见表2.
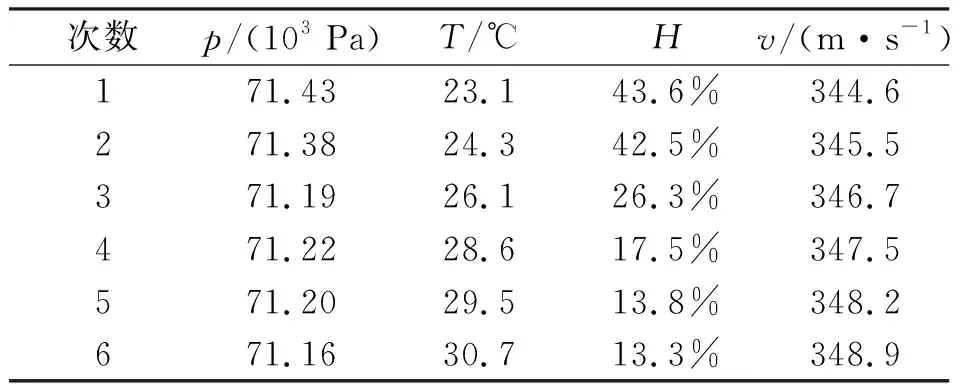
表2 用电子装置测量声速的数据
2.3 理论计算结果
根据式(1)计算结果见表3.
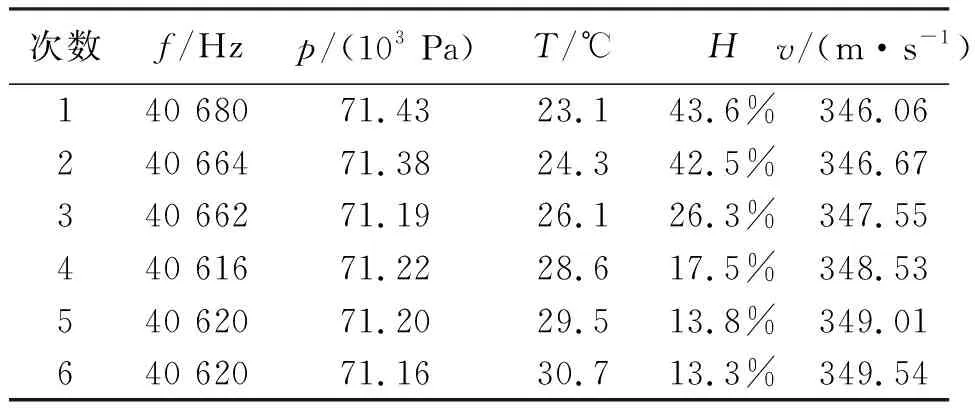
表3 由式(1)计算得到的声速数据
2.4 数据分析
由表1~表3可计算出各测得的速度的相对偏差,具体见表4,Er1为SWL-1实验装置测得的声速与理论声速的相对偏差,Er2为电子装置实测声速值与理论声速的相对偏差.
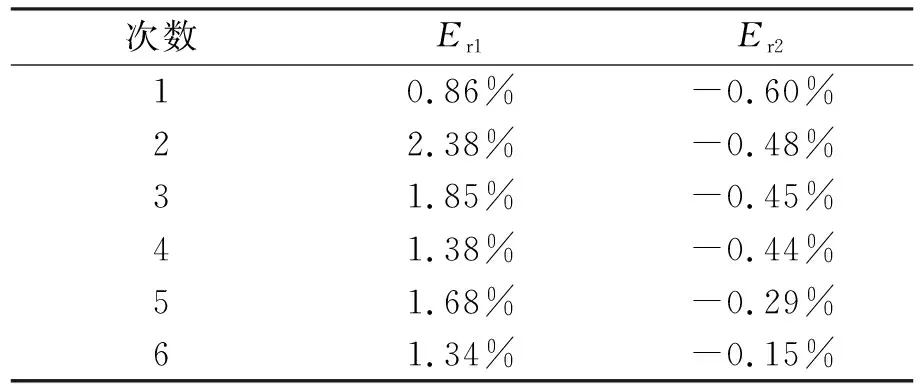
表4 相对偏差
由表4可知,本系统在实验原理、硬件结构和软件算法方面均采取了减小误差的措施,由实验数据得各组偏差均不超过1%,相比于SW-1实验装置实测声速处于合理的范围,可见本系统具有较高的准确度. 误差来源可能包括:温度/湿度传感器精确度为相对湿度±5%、温度±2 ℃,导致本电子装置输出结果与理论值存在偏差;信号采集和处理电路存在微小噪声.
3 结束语
本装置与现有的实验室测声速设备相比,实现了自动测量与计算,可及时测量,减少了人工干预;测量结果误差小,准确性高;结构简单、制作成本低、携带方便,可利用充电宝为其提供电源,方便在野外进行实地空气声速测量. 该声速测量实验装置可应用在大学基础物理实验及课堂教学环节,在声速测量实验中可提供声速值验证其他声速测量实验设备所得的声速数据的正确性,本装置也体现了虚拟仪器的设计思想.
