基于车辆传感网的交通路网自动提取方法研究*
2018-09-29赵小超郑金兵李科峰郑明才
赵小超,郑金兵,李科峰,郑明才
(1.湖南第一师范学院 信息科学与工程学院,湖南 长沙 410205;2.中国电子科技集团第48研究所,湖南 长沙 410111)
0 引 言
随着交通运输系统[1]的不断发展,路边基础设施和交通运输车辆的覆盖区域越来越宽广,信息化服务功能越来越完善,不仅具有越来越强大的交通运输能力,而且逐渐具有越来越丰富的泛在信息感知、处理、传输和应用能力[2],促使泛在互联车辆传感器网络(Vehicular Sensor Networks,VSN)[3]逐渐形成。基于泛在互联车辆传感器网络平台,智慧地球[4]、感知中国[5]、数字化城市[6]等信息化战略逐步加速实现。依托泛在互联车辆传感器网络的泛在信息感知和泛在信息传送能力,可以极大地促进诸多领域的信息化服务水平[7]的提升,如智能交通系统(Intelligent Transport System,ITS)[8]等。本文基于泛在互联车辆传感器网络获取的交通状况智能监测数据进行交通路网自动提取方法研究,为交通路网规划、自动驾驶、交通导航等服务提供健壮的路网信息自动获取途径。
1 基于车辆传感网的交通状况监测
泛在互联车辆传感器网络不仅具有丰富的泛在信息感知能力,还具有健壮的泛在信息传送能力。以路边基础设施为主的路边节点(Roadside node)和以交通运输车辆为主的车辆节点(Vehicle node),不仅能通过专用短程无线通信(Dedicated Short Radio Communication,DSRC) 自 组 成 网,而且能通过路边节点丰富的网络接入能力接入Internet、移动通信、卫星通信等公用通信网络实现泛在互联。在自组网、泛在互联以及运输车辆自捎带等传送途径的保障下,泛在互联车辆传感网络具有极其健壮的泛在信息传送能力,可为交通状况智能监测数据的汇聚处理提供便利。泛在互联车辆传感器网络组成如图1所示。
交通状况信息遍布于广阔的物理空间和繁杂的信息空间,感知对象种类繁多,信息的表现形式多种多样,信息质量及可信度参差不齐,且跨时空相互关联和互为补充。因此,完备可信的交通状况信息泛在感知必不可少。在基于泛在互联车辆传感器网络的交通状况智能监测信息中,常用的监测数据包含时间信息、位置信息、速度信息以及场景的视频监控信息等,可用于交通阻塞、运输安全、事故救援、出行效率、路网规划等交通信息化服务应用中。此外,从交通状况智能监测数据中可以提炼出大量极具价值的有用信息。

图1 泛在互联车辆传感器网络
2 基于监测数据的交通路网自动提取
交通状况智能监测数据海量混杂、跨时空相互关联,具体应用时需做相应处理。将交通状况智能监测数据用于交通路网自动提取时,需经过监测数据筛选、监测数据增强、路网边界节点标定和路网边界确定等处理过程。
2.1 监测数据筛选
交通路网自动提取的主要任务是路网边界的确定,可由车辆节点的实时位置感知数据获取。因此,从海量繁杂的交通状况智能监测数据中筛选出与时间关联的车辆节点位置信息,是交通路网自动提取的首要任务。在这项任务中,需解决以下问题。
(1)运动车辆节点识别。用于交通路网自动提取的位置信息,只能是在路网中运动的车辆节点的位置信息。运动车辆节点的识别可根据车辆节点标识符和其运动速度联合识别。
(2)与时间关联的运动车辆节点位置信息抽取。为准确标记交通路网边界,只选取运动中的车辆节点的实时位置感知信息作为交通路网自动提取的源数据。选取的数据中应包含运动车辆实时感知时的时间信息和坐标位置信息。
(3)与时间关联的车辆节点分布场景形成。以时间为序,将相同时间、不同运动车辆的位置信息形成一幅幅运动车辆节点的实时分布场景。
2.2 监测数据增强
根据运动车辆位置信息进行交通路网自动提取时,需要路网中运动车辆的分布密度足够大,才能保证路网边界每个点域内都有运动车辆覆盖。如果仅以某个时刻的运动车辆分布场景作为交通路网自动提取的源数据,显然难以满足准确提取的要求。为准确标识交通路网边界,可将诸多不同时刻的运动车辆实时分布场景进行叠加,以形成分布密度足够大的运动车辆增强分布场景。为保证在增强分布场景中的每个点域内均有运动车辆覆盖,在选用用于叠加的运动车辆实时分布场景时,需考虑以下因素:
(1)场景中运动车辆数量较多。选用运动车辆多的实时分布场景用于叠加,场景增强效果明显。
(2)场景中运动车辆分布较均匀。选用运动车辆分布较均匀的实时分布场景用于叠加,增强场景的运动车辆分布效果较好。
(3)相邻时间场景的时间间隔适当。选用时间间隔适当的实时分布场景用于叠加,增强场景中的运动车辆分布的重叠率可以减少,有利于提高增强场景中运动车辆分布的均匀性。
2.3 路网边界节点标定
路网边界由位于路网边界处的运动车辆节点决定。从增强分布场景中去掉非边界车辆节点,保留边界车辆节点,路网边界即可被提取出来。路网边界节点标定是交通路网自动提取的关键。在路网边界节点标定过程中,先沿x方向搜寻边界节点,再沿y方向搜寻边界节点,最后根据x方向和y方向搜寻结果综合标定路网边界节点。
(1)沿x方向搜寻边界节点。在某个y坐标的横带邻域内,沿x方向搜寻左边界节点和右边界节点。
(2)沿y方向搜寻边界节点。在某个x坐标的竖带邻域内,沿y方向搜寻上边界节点和下边界节点。
(3)边界节点综合标定。根据x方向搜寻结果和y方向搜寻结果综合标定边界节点。
2.4 路网边界确定
根据路网边界节点的位置,用适当的插值方法可以确定路网边界。
(1)若路网边界节点比较密集,则将相邻边界节点互联,即可得到路网边界。
(2)若路网边界节点比较稀疏,则经过适当的插值方法插入边界节点,然后将相邻边界节点互联成路网边界。
交通路网自动提取方法流程如下。
A.交通状况智能监测数据采集
采集任务分发;
泛在互联车辆传感网逻辑拓扑结构生成;
采集数据汇聚。
B.智能监测数据筛选
车辆节点速度测定;
运动车辆节点辨识;
运动车辆节点时间关联位置信息选取;
实时分布场景形成。
C.分布场景增强
大运动车辆数实时分布场景选取;
运动车辆分布均匀实时分布场景选取;
时间间隔适当实时分布场景选取;
选用实时分布场景叠加生成增强场景;
增强场景重叠节点去除。
D.交通路网边界标识
边界车辆节点搜寻步长确定;
沿x方向的左边界节点搜寻;
沿x方向的右边界节点搜寻;
沿y方向的上边界节点搜寻;
沿y方向的下边界节点搜寻;
边界节点综合标定。
E.交通路网边界确定
边界节点插补;
路网边界标识。
3 实例分析
针对图2的交通路网,“L1”和“L2”为路网边界,分别由(Xmin,Ymin)与(XZ,Ymin)、(Xf,Ymax)与(Xmin,Ymax)限定,左上角(Xmin,Ymax)与右下角(Xmax,Ymin)标定的矩形区域为交通路网自动提取的区域。根据运动车辆实时位置感知信息进行交通路网自动提取,实例分析 中 取 Xmin=Ymin=-200 m,Xmax=Ymax=-200 m,Xf=-150 m,XZ=150 m,图3~图8为提取结果。
图3为某个时刻运动车辆节点在交通路网中的实时分布场景图。可见,运动车辆节点在路网中的分布密度不是足够大,分布也不够均匀,影响交通路网自动提取的精准性。

图2 交通路网模型
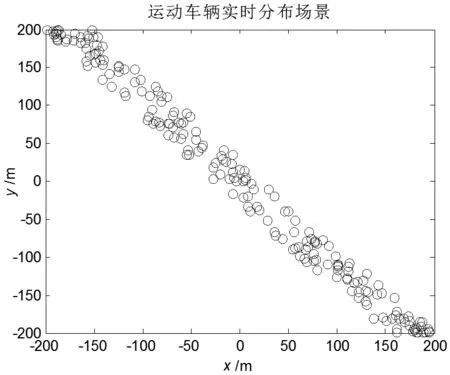
图3 运动车辆实时分布场景
图4 为多个实时分布场景叠加后的运动车辆节点增强分布场景,交通路网中的运动车辆分布密度和分布均匀性均有较大程度改善,有利于提高交通路网自动提取的精准性。

图4 运动车辆增强分布场景
图5 为在增强分布场景中沿y方向搜寻得到的位于交通路网边界处的运动车辆节点分布图。可见,它与实际路网边界基本一致,只是在区域部分边界的非路网边界处留有少量非边界节点。

图5 沿y方向搜寻的边界节点分布
图6 为在增强分布场景中沿x方向搜寻得到的位于交通路网边界处的运动车辆节点分布图,可见与实际路网边界基本一致。

图6 沿x方向搜寻的边界节点分布
图7 为根据沿x方向和沿y方向搜寻结果综合标定出的边界节点分布情况,排除了图6中存在的非边界节点和沿x方向和y方向搜寻结果中稍微有点偏离路网边界的部分节点,使保留的节点更接近交通路网的实际边界。
图8为由综合标定的边界节点分布提取出的交通路网边界,与实际交通路网边界基本一致。
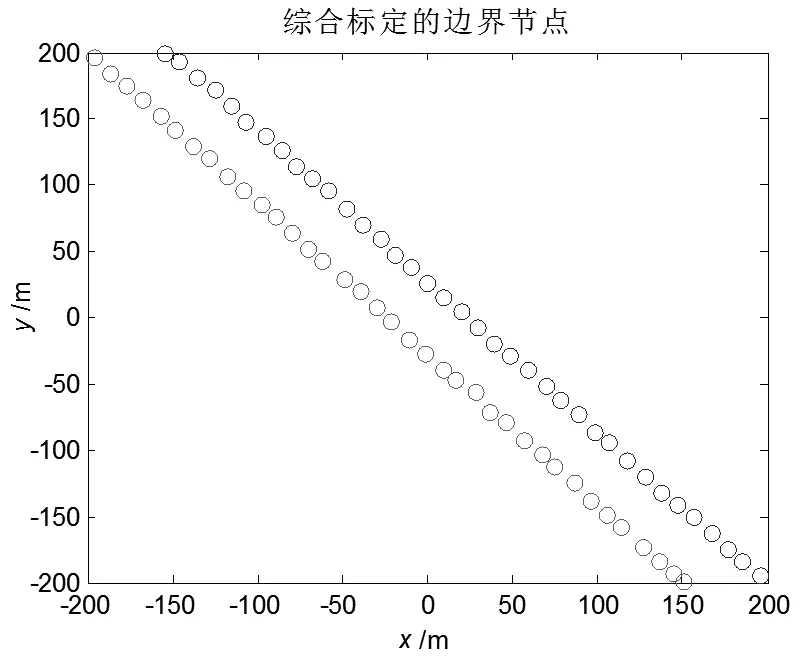
图7 综合标定的边界节点分布
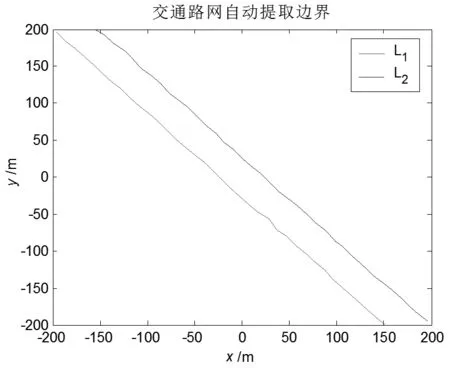
图8 自动提取的交通路网边界线
4 结 语
交通路网中密集分布的运动车辆的位置信息能准确反映交通路网的分布情况,从运动车辆密集分布场景中筛选出边界节点,提取出交通路网的边界线,提取出交通路网的分布情况,界定交通路网的边界,有利于路网规划、智能驾驶、交通导航等应用中路网边界的自动获取。为进一步提高路网边界自动提取的精准性,在自动提取算法上还有待进一步深入研究。