基于区域和边界融合的CV模型研究*
2018-09-29孟宇婷高建瓴
孟宇婷,高建瓴
(贵州大学 大数据与信息工程学院,贵州 贵阳 550025)
0 引 言
图像分割是图像处理中的一个重要环节,目的在于提取图像中含有重要特征或信息的目标区域。图像分割的精确往往决定后期图像处理与分析的准确度,而针对目前图像处理中目标区域所呈现的目标结构复杂、噪声大、灰度不均匀等特性,传统的图像分割算法如基于边缘检测的分割算法、基于阈值的分割算法等对图像的分割达不到预期效果。近年来,基于形变模型的分割算法成为当前的研究热点。该模型的优点在于通过计算能量泛函的最小值,使拟合曲线逐渐趋近于目标边界,最终达到拟合。
基于形变活动轮廓模型一般分为基于边缘模型和基于区域模型两种。基于边缘模型利用图像的梯度信息来控制曲线的演化,基于区域模型利用区域灰度信息来控制曲线演化。而基于区域的活动轮廓模型相比于边缘模型来说,更适合分割复杂、噪声较大的图像,原因在于其通过引入水平集函数来表示目标轮廓,从而达到准确分割目标图像的目的。
CV模型、LBF模型和PC模型等,都是基于区域的活动轮廓模型。2001年,Chan等人提出Chan-Vese模型[1],通过计算目标区域与背景区域的灰度信息来控制曲线的拓扑变化,使得复杂结构的目标得以准确分割且对初始轮廓有较高的鲁棒性。但是,传统的CV模型利用的是全局信息,而没有利用局部信息,导致对图像中灰度不均匀区域分割效果不理想。针对这一问题,Li等人提出经典的局部二值拟合(LBF)模型[2],通过引入高斯核函数,利用局部信息来控制曲线的演化。它针对灰度不均匀图片的拟合效果较好,但是对初始轮廓敏感。
本文提出一种结合区域信息的CV模型,通过CV模型在全局拟合项中引入区域灰度信息,并在新的能量泛函中加入梯度信息,增强对灰度不均匀区域的分割准确度,以提高CV模型的分割效率。
1 CV模型
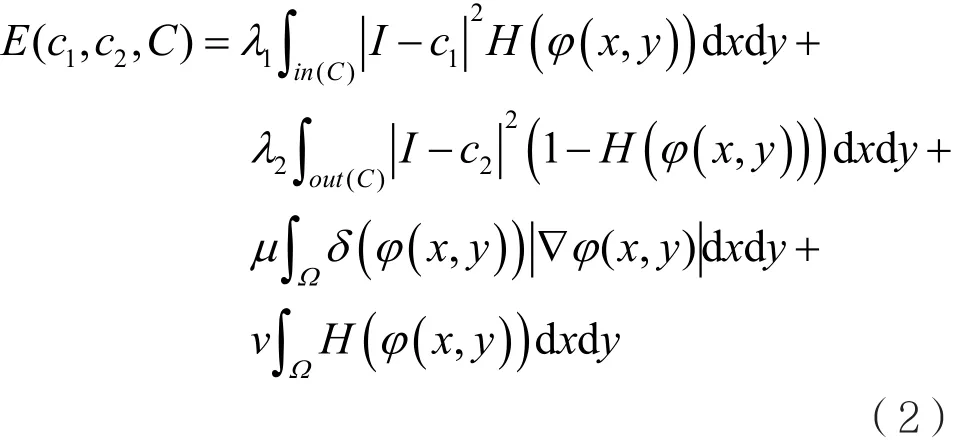
CV模型是基于全局信息的模型[1],原理为:图像I被初始轮廓曲线C分为两个同质区域,目标区域inside(C)和背景区域outside(C),能量泛函为:

其中,μ≥0,v≥0,λ1≥0,λ2≥0为各个能量项的权重系数,L(C)代表闭合轮廓曲线的长度,s(C)代表内部区域的面积,c1和c2代表目标区域与背景区域的平均灰度值。
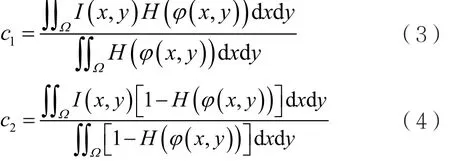
能量泛函结合水平集方法得到:
式中:
H(z)是Heaviside函数,δ(z)是Dirac函数,将H(z)和δ(z)正则化,表达式为:

通过梯度下降法和拉格朗日方法推导出最终的能量泛函:

2 本文模型
2.1 改进CV模型
由于CV模型利用全局能量项且假定活动轮廓分割的背景区域和目标区域是同质区域,导致CV模型对灰度不均匀的图像以及其目标区域不能进行准确分割,特别是c1和c2代表的是目标和背景区域的平均灰度值,并不能充分表示拟合曲线内外的灰度信息的变化,当区域内有像素突变时,往往会对拟合区域的目标边界进行误判[3]。
针对这一问题,本文在能量泛函中加入区域灰度相似性信息。参照文献[4],灰度信息采用颜色特征值的统计直方图进行特征描述,灰度信息表达式为:
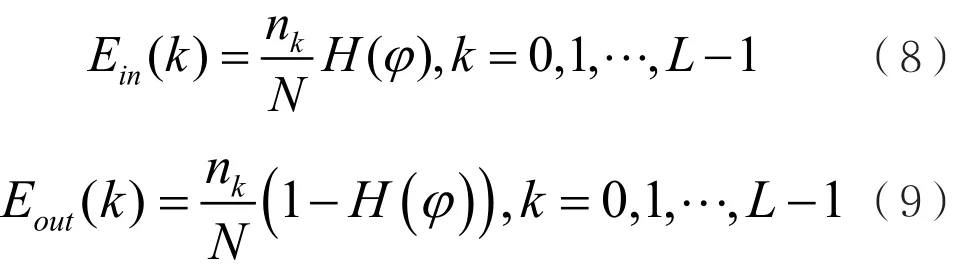
式(8)、式(9)是一维离散函数,式中k为图像的灰度值,L是图像灰度值范围,nk是图像中具有灰度值为k的像素个数,N是图像在目标区域和背景区域的像素总数。因为图像的纹理特征信息会影响区域相似性,所以本文在计算灰度相似性时考虑纹理特征,从而使灰度信息表达式更合理。
假设c1和c2分别代表目标区域和背景区域的统计直方图灰度均值信息,则用欧式距离函数来计算直方图的相似性[5],表达式为:

式中的G取值在[0,1]。当G的取值越小,代表所在区域的灰度相似性越大;当G的取值越大,代表所在区域的灰度相似性越小。
改进后的能量泛函为:
针对式(12)的改进是由于c1和c2计算的是灰度均值,当有噪声污染时,局部像素点会产生突变,从而使拟合曲线误判噪声点为目标边界而不能较好地对真实目标边界进行拟合。通过计算区域内每个像素点与均值点的偏差得到区域内像素相似度,有利于削弱噪声点的影响,使拟合曲线向目标区域演化。
相似度的测量只针对区域信息,而对于边界信息没有较好利用。所以,在式(12)的基础上,加入边缘检测函数,主要是利用区域内各个像素点的灰度梯度值。当为同质区域时,灰度值相等,因此该区域内像素点的梯度值为0,而目标边界的梯度值最大,拟合曲线在边界停止演化。边缘检测函数的定义如下[6-9]:

式中:H表示Heaviside函数,Gσ表示标准差为σ的Gaussian滤波算子,∇表示梯度算子,当边缘指数函数g趋近于1时,边缘区域梯度值|∇Gσ·I|趋于0,此时区域内灰度像素值没有较大变化。相反,当g趋近0时,表明梯度变化较大,拟合曲线靠近目标边界。
为了使拟合曲线接近目标边缘,边缘指示函数达到最小值[10],所以利用水平集方法构造边缘能量函数:
将区域灰度信息和边缘指示函数加入CV模型,得到的最终能量泛函为:
求得最小化能量泛函:

由式(16)可得拟合曲线演化的方程:

2.2 改进CV模型的数值求解
在求解式(17)时,为了保证数值求解的稳定性,常用有限差分数值求解。由文献[11]和文献[12]可得:用离散网格来表达水平集函数φ(x,y,t),设离散网格的间隔为h,时间步长为Δt,则此时在网格节点i、j处的水平集函数为 ϕi,j=ϕ( ih , j h,n∆t)。在计算曲线演化方程中的曲率时,需定义以下六个差分算子:
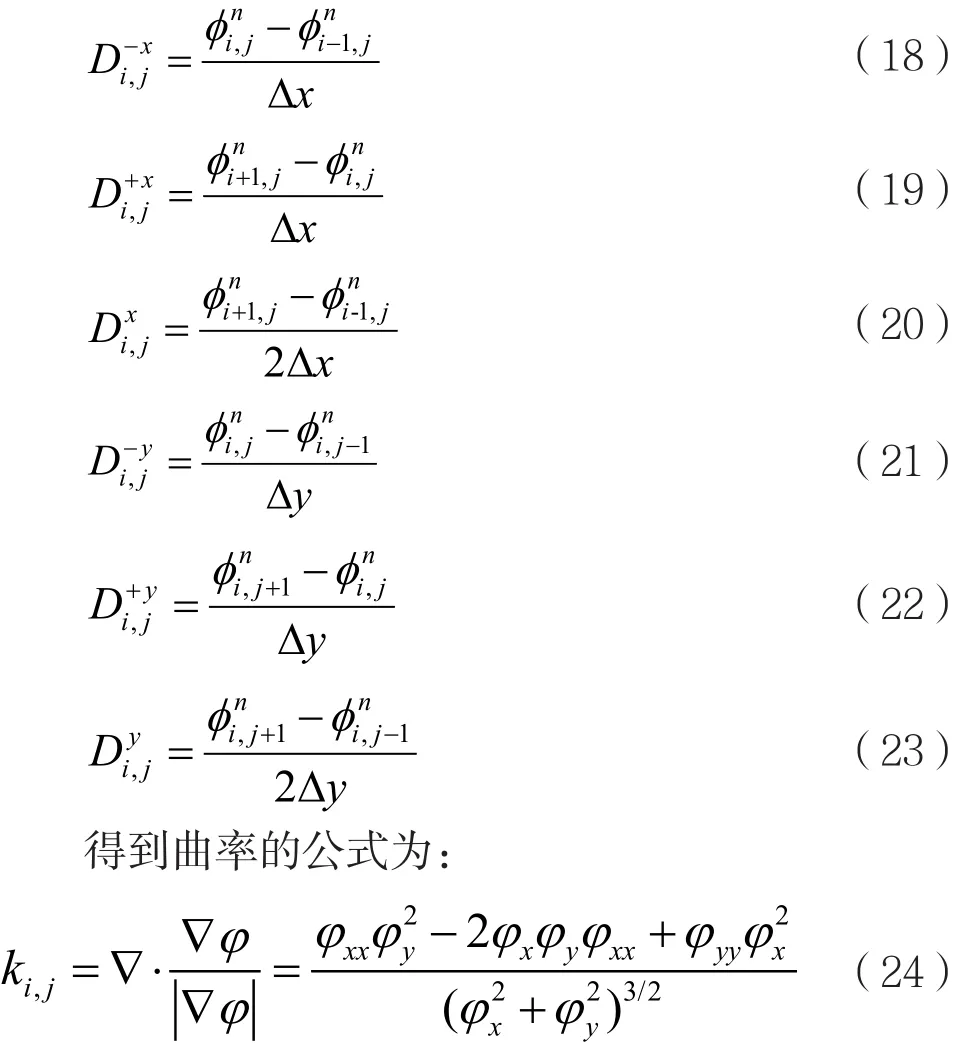
则演化方程的离散化形式为:

2.3 改进CV模型的主要步骤
算法的主要步骤:
通过式(3)、式(4)、式(10)和式(11)计算拟合项 G1c1(φn)和 G2c2(φn);
3 实验验证
为了验证本文模型对灰度不均匀图像能够精确分割,本文拟采用医学图像、人工合成图像和自然图像进行分割实验。通过对比CV模型、LBF模型和本文改进模型的实验结果,从三个方面验证本文算法的有效性:(1)验证本文模型对初始轮廓的鲁棒性;(2)本文模型对噪声的鲁棒性;(3)在相同迭代次数下,本文算法的分割效率。
本文实验环境的主要参数:CPU为Intel(R)Core(TM)i5-7500 CPU@3.40 GHz 3.41GHz,CPU内存(RAM)为8 GB,操作系统为Windows 10(基于x64处理器的64位操作系统),实验平台为Matlab R2016a。本文算法中,参数选取主要为:λ1=λ2=1,ε=5,Δt=1,μ=1,v=1,h=1。
3.1 本文模型对初始轮廓的鲁棒性
本实验选取181×217像素的医学图像作为实验对象,在实验参数相同的情况下,采用不同的初始轮廓,对比CV模型、LBF模型和本文模型对初始轮廓的鲁棒性,结果如图1所示。

图1 对比不同初始轮廓下的分割效果
由图1可以看出,在不同初始轮廓下,CV模型对于灰度不均匀区域的分割效果不好;LBF模型对初始轮廓较为敏感,在不同初始轮廓下,LBF的分割效果不稳定;对于本文模型来说,由于加入区域相似性和边界函数,既对初始轮廓具有鲁棒性,同时能够对灰度不均匀区域实现较好的分割。
3.2 本文模型对噪声的鲁棒性
为了验证本文模型对噪声具有鲁棒性,本实验采用84×84像素的人工合成图像,以不同程度的高斯噪声为例进行相关实验,结果如图2所示。

图2 对噪声鲁棒性的验证
从图2的实验结果可以看出,随着高斯噪声的系数增加,本文模型在对被强噪声污染的灰度不均匀图像分割时,对不同强度的噪声都具有较高的鲁棒性。
3.3 本文模型对灰度不均匀图像的分割效率
为了充分验证本文的分割效率,本实验在采用同一迭代次数和同一参数的条件下,对低像素、灰度不均匀图像进行分割实验。本实验选取83×65像素的人工合成图像、180×107像素的医学图像和85×63像素的细胞图像,实验结果如图3所示。表1则表示不同算法的分割效率对比情况。
由图3和表1可知,本文在分割灰度不均匀图像时的分割效果和分割时间明显优于其他算法,原因在于本文提出在全局项中加入了区域灰度相似度信息和边界检测函数,促进了拟合曲线向边界演化,从而更好地拟合了目标边界。

图3 对比不同算法的分割准确率

表1 对比不同算法的分割效率
4 结 语
本文针对CV模型只利用全局信息而不能准确分割灰度不均匀目标区域的特点,提出一种结合区域灰度信息和边界信息的分割模型。该模型利用区域灰度相似性特征对全局项进行改进,使改进后的模型对拟合区域更加敏感,不易受突变像素的影响。此外,加入了边界检测函数,使拟合曲线更好地拟合了目标边界。通过本文模型和CV、LBF模型的对比实验证明,本文模型对初始轮廓的鲁棒性、对噪声的抗噪性和分割准确度等性能都有所提高。