改进蚁群算法优化连杆压力机构及其动力学仿真
2018-09-28梅志平
梅志平
改进蚁群算法优化连杆压力机构及其动力学仿真
梅志平
(安徽省科昌机械制造股份有限公司,安徽 滁州 239500 )
为了提高压力机构运动的稳定性,改善冲压件产品质量。采用改进蚁群算法优化目标函数,得出八杆压力机构设计参数。采用数学软件MATLAB对八杆压力机构的滑块速度进行仿真,输出滑块运动速度曲线。结果表明:在冲压行程内,优化后的八杆压力机构滑块速度运动平稳,回程速度较快。采用改进蚁群算法优化八杆压力机构,能够提高汽车薄壁冲压件产品性能。
改进蚁群算法; 八杆机构; 优化; 仿真
0.引言
金属冲压件普遍采用机械式压力机构,传统的压力机主要采用四杆曲柄机构。但是,对于汽车薄板覆盖件,具有以下缺陷:滑块工作行程速度较大,导致冲压件易撕裂或起皱,造成产品浪费;滑块空行程时间长,加工效率低。目前压力机构大多采用多连杆机构,主要是为了降低滑块工作行程的速度,同时加快回程速度,从而提高加工生存率[1]。压力机构设计的水平决定其产品质量和生产效率。因此,采用更合理方法设计多连杆压力机构,对于促进压力机的发展变得非常重要。
目前,很多学者对压力机构进行研究,形成了多种理论和方法。例如:文献[2]研究了六杆冲压机构设计方法,采用复合形法求解六杆冲压机构参数变量,利用ADAMS软件对优化机构进行速度仿真。文献[3]研究了八连杆压力机构的设计方法,采用ADAMS软件优化目标函数,通过优化参数建立虚拟样机并进行仿真。文献[4]研究了混合驱动压力机构的设计方法,建立速度优化目标函数,采用ADAMS软件优化设计参数,并进行动力学仿真验证。以前压力机构滑块速度虽然得到了改进,但是,对于薄板覆盖件,滑块工作行程内的运动速度很难维持稳定,导致冲压件合格率下降。对此,采用改进蚁群算法优化八连杆压力机构,建立八杆压力机构平面简图,推导出滑块运动位移方程式,在约束条件下,采用改进蚁群算法优化八连杆机构设计变量。采用MATLAB软件仿真滑块运动速度变化曲线,分析优化前和优化后的滑块速度仿真结果,为压力机构的合理化设计提供理论基础。
1.八杆压力机构
八杆压力机构的平面图形如图1所示。在图1中,1和2为固定支点,1为曲柄连杆1的长度,2为连杆的长度,3为连杆2的长度,4为连杆2的长度,5为连杆的长度,6为连杆的长度,7为连杆的长度,8为连杆的长度,9为1的垂直距离。
根据图1可知,压力机构的矢量方程式如(1)式所示[5]:
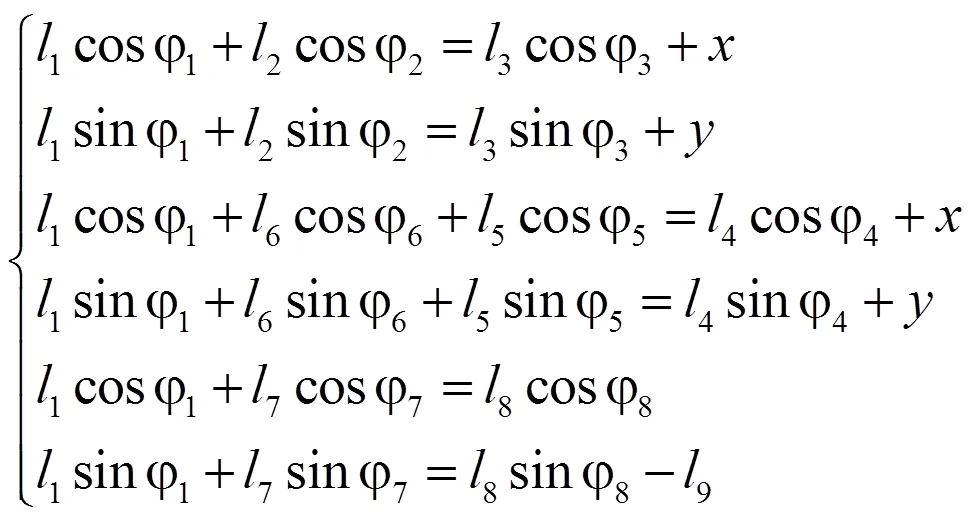
式中:φ1、φ2、φ3、φ4、φ5、φ6、φ7和φ8为连杆1、2、3、4、5、6、7和8运动角度;和分别为1点的水平位置和垂直位置。

图1 八杆压力机平面图
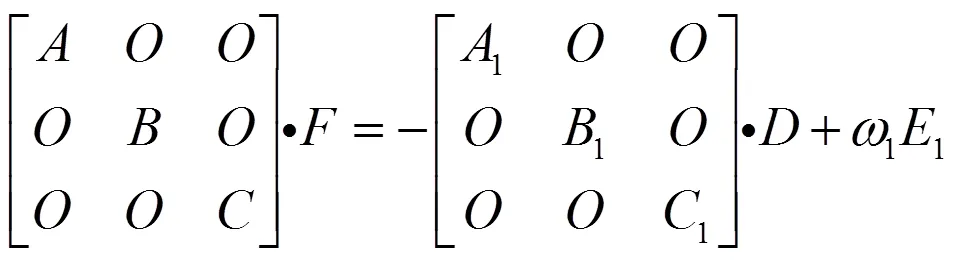
对公式(1)求导后,可得到速度关系(2)式。

式中:
对公式(2)求导后,可得加速度关系(3)式。
式中:
据图1,可以得到角度的关系(4)式和(5)式。


式中:1为连杆3和4的夹角;2为连杆6和7的夹角。
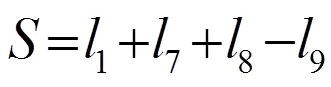
当八杆机构运动到下死点位置时,连杆1、7、8共线,此时滑块运动到最远位置,取滑块运动到最远位置为起点,可推导出滑块位移方程式(6):
对公式(6)求导可以得到滑块速度方程式,如(7)式所示:

对公式(7)求导可以得到滑块加速度方程式,如(8)式所示:
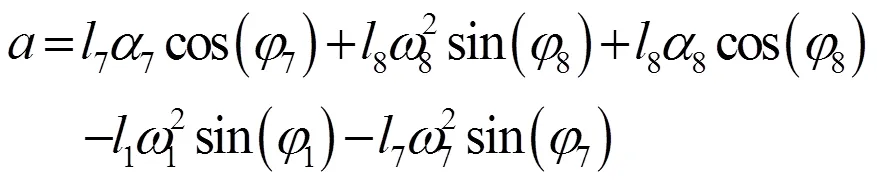
式中:7、7分别为连杆7的角速度和角加速度;8、8分别为连杆8的角速度和角加速度。
2.优化数学模型
2.1.设计变量
由八连杆压力机构运动参数可知,影响滑块的位移、速度和加速度的参数有:1、2、3、4、5、6、7、8、、、1、2。因此,八连杆压力机构优化设计变量为X=[1,2,3,4,5,6,7,8,,,1,2]。
2.2.目标函数
八连杆压力机在冲压行程中,要求滑块实际运动速度变化较小,有利于冲压件成形。因此,采用冲压行程的速度波动量最小为目标函数,如(9)式所示[6]:
式中:V为滑块冲压行程实际速度;V为滑块冲压行程平均速度。
2.3.约束条件
根据曲柄存在的条件,八杆压力机构的约束条件如(10)式所示[7]:

3.改进蚁群算法
蚁群算法是通过在图中搜索到优化路径的机率型算法[8],,蚂蚁在时刻从位置转移到位置的概率,如(11)式所示[9]:

式中:τ为信息素强度;η为能见度系数;a为蚂蚁运动范围;为蚂蚁累积信息;为蚂蚁启发信息。
蚂蚁运动一段时间后,各路径信息素也会不断地进行更新,其更新方程式如(12)式所示[10]:

式中:Δτ(,+1)为(,+1)时刻的蚂蚁通过路径(,)所留下的信息素量;Δτ(,+1)为路径(,)当前循环的信息素增量;为信息素系数。
改进蚁群算法是将蚁群随机分布,产生蚂蚁信息素的初始值。根据转移概率,判别蚂蚁是否采用全局搜索或局部搜索。信息素随着蚂蚁的移动而不断更新,不断迭代循环,从而输出最优解,原理如图2所示。具体步骤如下:

图2 改进蚁群算法迭代流程图
(1)在可行域内随机分配蚁群的初始位置;
(2)设定信息素τ的目标函数,如(13)式所示:

信息素的值与目标函数增减性相反,目标函数最小值,即为信息素的最大值。因为目标函数正向趋于零,所以信息素就负向趋于零,信息素的浓度很难判定。因此,采用信息素的平均值进行判断,如(14)式所示:

(3)通过平均信息素值确定最优值τ;
(4)由转移概率P,j决定蚁群是否需要局部或者全局搜索,其方程式如(15)式所示:

式中:为蚁群移动次数;为蚂蚁编号,τ为蚁群移动次后的只蚂蚁信息素值。
比较P,j与0概率,若P,j>0,采用全局搜索最优值,否则采用局部搜索。
(5)蚂蚁完成一次搜索后,都需要更新,若τ,jnew<τ,jold,蚂蚁信息素不会发生改变,若τ,jnew>τ,jold,更新蚂蚁信息素;
(6)蚁群完成一次循环后,再次更新蚂蚁信息,其更新方程式为:

4.仿真与分析
根据八杆压力机构运动目标函数和约束条件,采用改进蚁群算法优化八杆机构几何参数,优化初始条件设置为:蚁群种群大小为30,最大迭代次数为200,信息素系数为0.9。采用改进蚁群算法优化后八杆压力机构设计变量为X=[215, 1610, 510, 555, 1560, 860, 905, 985, 1485, 510, 175, 45]。采用MATLAB软件对八杆压力机构滑块速度进行仿真,仿真曲线如图3所示。
根据图3可知,在曲柄转角为[0º~105 º],滑块从初始位置运动到冲压件位置,需要滑块快速的到达指定位置,或曲柄转角在[255º~360º]范围内,滑块需要从冲压件位置返回初始位置,优化前,运动速度较慢,优化后速度较快。在曲柄转角为[105º~255º],滑块需要对冲压件进行冲压加工,优化前,滑块运动速度波动较大,优化后,滑块运动速度波动较小。因此,采用改进蚁群算法算法优化八杆压力机构参数,能够在冲压行程中维持速度稳定,提高冲压件质量。
5.结论
采用改进蚁群算法优化八杆机构参数,并对滑块运动速度进行仿真验证,主要结论如下:
(1)采用改进蚁群算法优化八杆机构,能够提高生产效率,改善了冲压件产品质量。
(2)改进蚁群算法能够快速的搜到全局最优解,从而提高了设计效率。
(3)采用MATLAB软件能够模拟八杆机构冲压过程速度变化,避免设计不合理而造成冲压件产品质量下降。
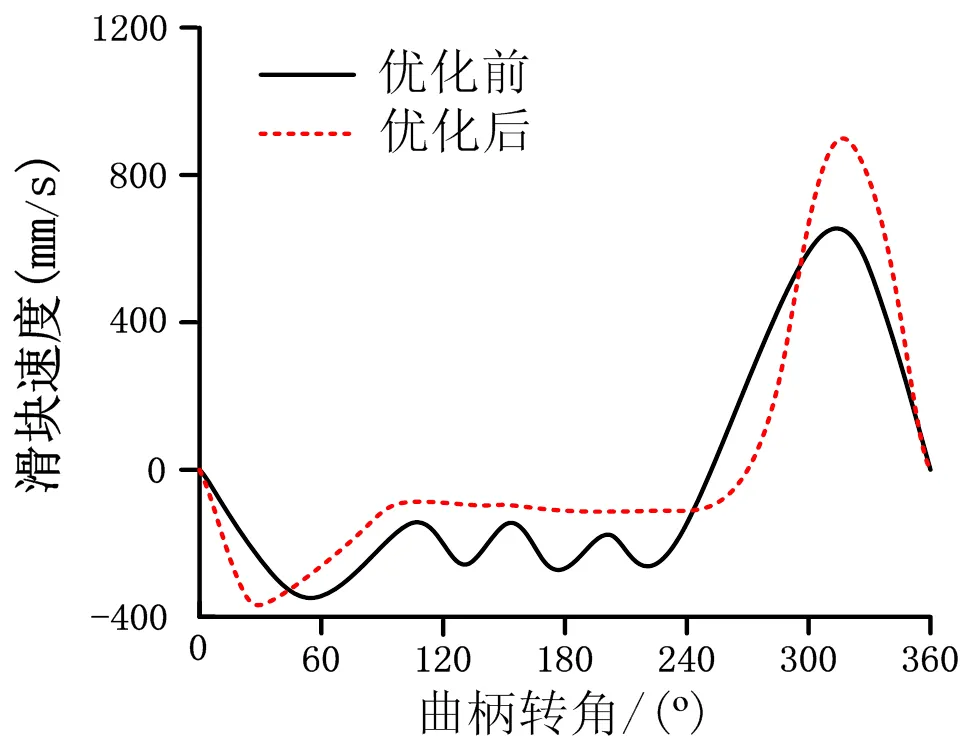
图3 压力机构滑块速度仿真结果
[1] 宋永强.机械压力机多连杆机构优化设计及运动仿真研究[D].济南:山东大学,2011:8-67.
[2] 吕鲲,袁扬,郭冬.牛头刨床六杆机构的优化设计及仿真[J].机械传动,2013,37(3):52-55.
[3] 于珊珊,贺磊,郭前建.基于ADAMS软件的机械压力机工作机构优化设计[J].机械设计,2013,30(2):24-26.
[4] 陈文,傅蔡安.混合驱动冲压机构的运动学分析及参数优化[J].机床与液压,2011,39(7):111-1113.
[5] 傅蔡安,陈文.混合输入冲压机构的运动学分析及参数优化[J].中国机械工程,2011,22(6):666-670.
[6] 杨春峰,张盛,李云鹏,等.机械压力机六连杆机构优化设计[J].大连理工大学学报,2013,53(1):64-69.
[7] 郑文纬,吴克坚.机械原理[M].北京:高等教育出版社,,2012:35-45.
[8] 喻环.改进蚁群算法在机器人路径规划上的应用研究[D].合肥:安徽大学,2017:11-18.
[9] 张栋华,李征,蔡旭.基于改进蚁群算法的3-PPR并联机构位置正解研究[J].农业机械学报,2015,46(7):340-343.
Optimization and Dynamic Simulation of Linkage Pressure Mechanism Optimized by Improved Ant Colony Algorithm
MEI Zhiping
( AnhuiKechang Machinery Manufacturing Co. Ltd, Chuzhou 239500, Anhui, China )
The pressure mechanism was unstable in the stamping stroke, causing the quality of the stamping parts to drop. In this regard, the improved ant colony algorithm was used to optimize the objective function, and the design parameters of the eight bar pressure mechanism were obtained. The slide speed of the eight bar pressure mechanism was simulated by using the mathematical software MATLAB, and the speed curve of the slider was output. The results showed that in the stamping stroke, the optimized eight bar pressure mechanism slider had a steady speed and a fast return speed. The improved ant colony algorithm wasused to optimize the eight bar pressure mechanism to improve the processing quality of stamping parts.
improved ant colony algorithm, eight bar mechanism, optimization, simulation
TH112
A
1673-9639 (2018) 09-0041-04
2018-06-05
梅志平(1987-),男,安徽全椒人,本科,工程师,研究方向:机械设计与制造。
(责任编辑 谢 勇)(责任校对 杨凯旭)
