一种船舶操舵控制系统的可靠性分析∗
2018-09-27陈永冰李文魁
管 昊 陈永冰 周 岗 李文魁
(海军工程大学 武汉 430032)
1 引言
船舶操舵控制系统正朝着复杂化、自动化、智能化的方向发展[1-5],在进行船舶操舵控制系统方案设计和综合评价时,船舶操舵控制系统的可靠性是一项非常重要的性能指标,但目前针对船舶操舵控制系统的可靠性定量分析研究比较少。并且随着系统复杂化程度提高,其基本可靠性必然降低,而系统的任务可靠性可通过合理的可靠性分析与设计来提高。由于系统内包含的元器件众多,元器件的失效率计算工作量很大,主要有两种方法:一是元器件计数法,该方法直接选取元器件的通用失效率,然后对其计数相加,未考虑特定环境下各种因素的影响,计算快捷,但不够精确。笔者采用另一种元器件应力分析法,此方法考虑不同元器件应力、环境、质量、封装等多种因素,计算结果贴近实际,计算工作量较大。
为探讨船舶操舵控制系统的可靠性分析问题,以一种船舶操舵控制系统为例,建立基本可靠性与任务可靠性数学模型,选取船舶航行工况,采用元器件应力分析法计算系统内元器件的失效率,在此基础上计算得出两种模型下可靠度与平均故障间隔时间指标值,分析其差异性。
2 船舶操舵控制系统的结构组成与运行方式
如图1所示的一种船舶操舵控制系统,由操纵台、供电系统、接线系统、反馈系统几部分组成。该系统具有简操、随动和自动操纵三种操纵方式,操作模式选择由船舶航行环境、距离决定。如船舶离、靠码头及在复杂海域航行时,采用简单操纵模式或随动操纵模式来工作;船舶航行在开阔水域或需要长时间保持航向时,采用自动操纵模式来工作。简操与另外两种操纵方式存在结构上的隔离,因此在随动或自动操舵模式出现故障的情况下,可选择切换简操模式来保证船舶的正常航行。整个系统采用双通道设计,一般采用单通道运行,另一通道作为备用通道,处于冷备旁待运行方式。这保证了船舶在航行时当其中一个通道出现故障时,另一通道仍可以继续保持操纵有效性,确保船舶继续正常航行。这种冗余设计对于船舶操舵控制系统来说是非常必要的,提高了船舶航行的可靠性与安全性。
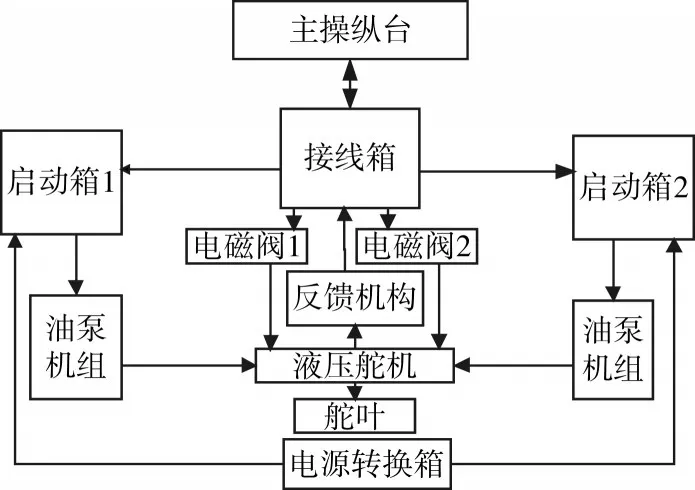
图1 某型操舵控制系统仪器组成图
3 可靠性逻辑框图的建立
船舶操舵控制系统包含大量电路、元器件,影响船舶操舵控制系统可靠性的因素主要包括两个方面:一是每个元器件的可靠性;二是各部件之间的不同组合方式。在对船舶操舵控制系统进行可靠性分析时,主要进行这两方面的研究,由于操舵控制系统元器件众多,结构繁杂,因此在建模时进行了适当的简化。
对图1所示的系统,决定基本可靠性的是系统在整个寿命期内发生的所有需要维修或更换的故障[5],不限于仅危及船舶正常航行的故障,系统基本可靠性预计使用串联模型来建立可靠性框图,即使系统内包含储备或冗余单元,均按串联处理,基本可靠逻辑框图如图2。该型船舶操舵控制系统具备简操、随动、自动三种操作模式,在建立系统的任务可靠性框图时,由于随动、自动两种操纵模式所包含的零部件大部分重合,而自动操纵涉及的环节更为全面,因此主要考虑简单操纵与自动操纵之间的冗余结构。图3为该型操舵控制系统的工作原理图,图4构建了系统的任务可靠性框图。

图2 某型操舵控制系统基本可靠性框图

图3 某型操舵控制系统控制原理图
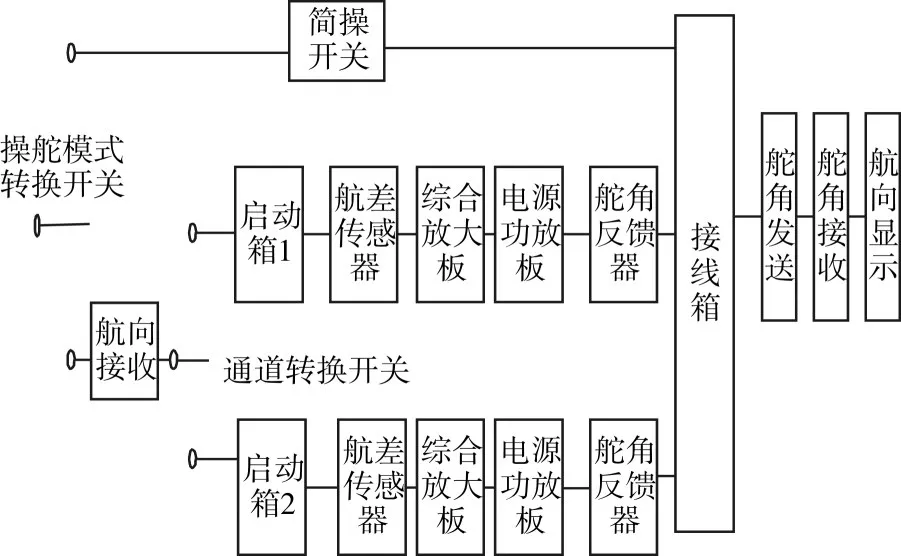
图4 某型操舵控制系统任务可靠性框图
4 基本公式
大量的统计资料证明,各元器件的可靠度一般服从指数分布,对船舶操舵控制系统来讲,在建立其可靠性模型时,不考虑预防维修时间、后勤延迟时间及行政时间[6~10],可得模型如下:
1)串联系统:由n个部件串联构成,系统内任意一个部件失效,导致系统失效。则:

平均故障间隔时间:

2)并联系统(冗余系统):由n个部件并联构成,只要其中有部件工作正常,系统不会发生失效,只有全部部件均失效才会导致系统失效。则:

平均故障间隔时间:

3)冷储备系统(2个同型部件):由两个同型部件以及一个转换开关组成,初始部件开始处于工作状态,另一个部件处于储备状态。初始部件无法正常工作,通过转换开关实现储备替换。开关失效时系统不会马上失效,只有当需要转换开关将储备部件替换已失效的初始部件时,开关失效才会导致系统失效[11]。
可靠度:

式中:λ与λk分别代表同型储备部件及转换开关的失效率。
采用元器件应力分析法预计一种船舶操舵控制系统的可靠性指标,这种方法需要预计出组成系统的所有元器件的失效率,所需的信息主要是:1)所有元器件的种类与数量;2)各类元器件失效率计算模型;3)元器件工作环境与温度;4)元器件的质量等级;5)元器件的电应力比等详细信息。以系统中某个元件六反相器CD4049的工作失效率λp计算为例,由电路原理知CD4049是六反相器,属CMOS型数字电路,由GJB∕Z299C中半导体集成电路工作失效率模型得知[12]:

式中:λP为工作失效率;πQ为质量系数;πL为成熟系数;πT为温度应力系数;πV为电压应力系数;πE为环境系数;C1及C2为电路复杂度失效率;C3为封装复杂度失效率。
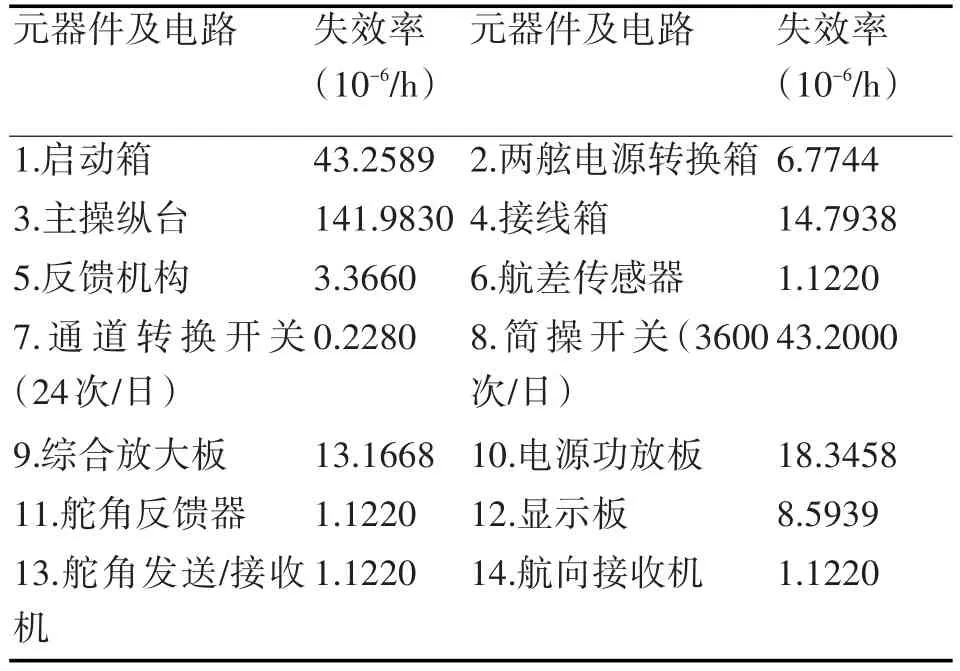
表1 某型操舵控制系统各单元失效率预计结果
例如综合放大板单元包含模拟电路、数字电路、硅功率放大管、硅开关二极管、PIN管、金属膜电阻、有机实芯电位器、各种不同类型电容和印制板等173个元器件,以及无线接烙铁焊点488个,将次173个元器件的失效率以及488个焊点的失效率相加,即计算出综合放大板失效率为13.1668×10-6/h,各单元的失效率计算结果见表1。
5 计算模型
基于上述基本模型,建立一种船舶操舵控制系统的基本可靠性与任务可靠性计算模型如下:
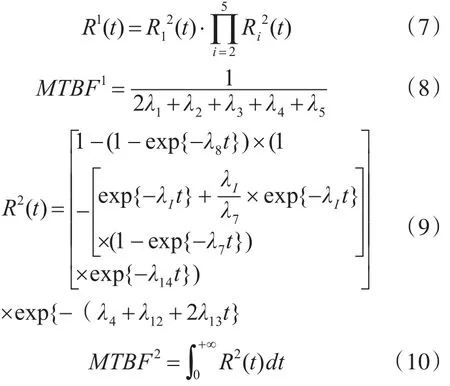
式中:λI=λ1+λ6+λ9+λ10+λ11
上面各式中的上标1、2分别表示控制系统在基本可靠型模型和任务可靠性模型下的可靠性指标。
6 计算结果与分析
用上述计算模型,得到一种船舶操舵控制系统的基本可靠度指标和任务可靠度指标曲线,图5所示,两个平均故障间隔时间分别为


图5 操舵系统基本可靠度与任务可靠度曲线对比
由图5曲线看出,船舶操舵控制系统的可靠度随工作时间的增长而逐渐降低,系统的平均故障间隔时间为3945h,该型操舵控制系统的可靠性指标要求系统的平均无故障时间不小于3000h,达到了系统的可靠性指标要求。这里的故障指系统内所有部件可能出现的故障,故障不一定会危及系统的控制功能。
由于系统采用了双通道冷储备设计以及三种不同的操作模式冗余设计,其任务可靠性比较高,平均任务故障间隔时间为20937h,任务故障指的是危及系统控制功能的故障,任务故障一旦产生,会使系统的控制能力失效或下降。

表2 基本可靠度与任务可靠度对比
7 结语
船舶操舵控制系统基本可靠性低于任务可靠性,基本可靠性随着系统的复杂度增加而降低,由于其结构上的冗余设计,系统的任务可靠性远高于基本可靠性,并且可通过结构上的改进设计来弥补由于复杂程度提高带来的可靠性隐患。
对船舶操舵控制系统进行可靠性数学建模,并采用元器件应力分析计算系统内元器件失效率,这种方法贴近实际情况,计算结果对系统可靠性评估具有一定的参考价值,此方法也为同类控制系统的可靠性分析提供了新思路。
