一种采用自适应LPA-ICI的最小二乘法相位展开
2018-09-26蔡青青顾春霞
蔡青青 顾春霞 王 玮
1(绍兴职业技术学院 浙江 绍兴 312000)2(中国电信集团公司 浙江 绍兴 312000)3(中国联合网络通信集团有限公司 江苏 扬州 225000)
0 引 言
相位展开[1-3]是光学三维测量中的一个重要步骤。由傅里叶法[4]和相移法[5-6]等方法得到的相位为折叠相位[6-7],与真实相位相差2kπ,因此,相位展开的目的就是获取精确的k值。在众多相位展开技术中,公认的最具有鲁棒性的一种全局性的算法是最小二乘[8-10]相位展开算法。其本质是寻找使缠绕相位的离散偏导数与解缠相位的偏导数整体偏差最小的解,并可归结为求解具有Neumann边界条件的离散泊松方程。求解该方程的常用方法[11]有:离散余弦变换法(DCT)、傅里叶变换法(FFT)等。FFT对图像尺寸有严格要求,并且耗时较长,而DTC对图像大小则无过多要求,且速度快。但是,基于DCT的最小二乘法在展开过程中,将噪声能量分配到周围像素点,存在过度平滑噪声现象,使误差不断传播。加权的最小二乘法[8]的提出,减小相位误差的传播,但该方法过分地依赖权重,且要求高品质的质量图,而现有技术很难满足该要求。
鉴于此,去除噪声是最小二乘法亟待解决的问题。局部多项式近似[11](Local Polynomial Approximation)是一种理论上公正的去噪算法,可以根据信号的特点,设计出特定性质的2D变换,而LPA算法的精度很大程度上受到窗口函数的影响。文献[12]提出方向LPA,结合置信区间交集(Intersection of Confidence Intervals)准则来设计滤波窗口,提出各向异性LPA-ICI算法。该方法原理简单,易于实现,在去除噪声的同时,极大地保护图像的细节特征。文献[13-14]对该算法进行了深入的研究,并结合PUMA相位展开法,提出PEARLS(Phase Estimation using Adaptive Regularization based on Local Smoothing)相位展开法,提高了相位展开的精度,但PUMA算法本身耗时较长,不适用于实时在线测量。
因此,针对基于DCT的最小二乘法相位展开过度平滑噪声的问题,提出采用自适应LPA-ICI的最小二乘(LIDLS)相位展开法。该方法可以有效地解决DCT-LS过度平滑噪声的问题,提升抗噪能力。同时该算法耗时少,在同数量级的误差范围内,相较PEARLS相位展开法,速度提高显著。
1 折叠相位去噪
1.1 噪声模型
在光栅投影测量系统中,设由相移法得到的二维包裹相位为φ(x,y),大小为M×N,其对应的绝对相位值为φ(x,y),则相位展开可以表示为:
φ(x,y)=φ(x,y)+2k(x,y)π
(1)
式中:k(x,y)为整数值函数。
由于图像在采集过程中常混有电子噪声,常用的两步相移法无法消除图像固有噪声,而三步、四步相移法在消除固有噪声的同时,却引入了随机噪声。文献[13-14]将观测到的折叠相位图模型定义为:
φ=φz+φn
(2)
式中:φ是观测到的折叠相位值,φz是真实的折叠相位,φn是噪声值。相位展开其实是采用合理的方法从观测的φ中去除噪声,估计出适当的k(x,y)的过程。在对式(1)展开的过程中,受到式(2)所示的叠加了噪声的观测值模型影响,使误差沿相位展开方向扩展,从而出现“拉线”等现象。去噪的目的是从式(2)所示的折叠相位模型中,得到精确相位展开值φ=W(φz),W(·)为相位展开操作。
1.2 自适应LPA-ICI算法
为了保持计算复杂度和估计值的精确度的平衡,采用LPA的零阶近似来推断窗口尺寸,和一阶近似来计算相位估计值。
假设在任意点(x,y)邻域内的相位φ(x,y)可以表达成:
(3)
式中:p=(p1,p2,p3)T是一阶多项式的向量,其中,p1=1,p2=x,p3=y,c=(c1,c2,c3)T是一个未知参数的向量。假设在相位为φ的点(x,y)的某个邻域内,存在一点(xs,ys)的相位φ无限接近,则必定存在向量c使得:
(4)
向量c的拟合函数为:
(5)
式(5)中Jh(c)定义为:
(6)

(7)
(8)
式(7)中:

ejc1Wh[(c2-c2)xs+(c3-c3)ys]
(9)
(10)
和一阶多项式近似估计:
(11)
ICI准则协助LPA完成滤波器窗口尺度的优化,采用的自适应算法的判定准则为:
(12)
(13)

2 相位展开算法
2.1 最小二乘法
对已知的折叠相位做最小二乘拟合,得到拟合函数:

(14)

(15)
(16)
式(15)和式(16)中的2kπ是为了保证方向梯度的值在[-π,π]。Hunt[15]的矩阵公式给出了上述最小二乘矩阵的线性方程组:
φ(x+1,y)+φ(x-1,y)+φ(x,y+1)+φ(x,y-1)-4φ(x,y)=ρ(x,y)
(17)

(18)
显然可以能过DCT该方程得到相位展开值φ(x,y)。
2.2 DCT算法
二维DCT过程为:
(19)
式(19)中:Di,j是像素点tx,y的二维DCT的谱值,其逆变换为:
tx,y
式(20)中:
w1(i)=1/2,i=0;w1(i)=1,1≤i≤M-1
w2(j)=1/2,j=0;w2(j)=1,1≤j≤N-1
根据式(17)和式(20),在离散余弦变换域上对相位φ(x,y)展开,得到其精确解为:
(21)
2.3 LIDLS相位展开法实现
Step2应用ICI准则来选择最佳窗口尺寸h+(x,y);
Step3根据式(11)和h值,计算一阶相位估计值,直至遍历整个图的像素点,否则跳至Step1;
3 仿真、实验结果及分析
3.1 仿真结果及分析
为了验证本文提出的方法的性能,采用硬件环境是CPU为奔腾D,主频为2 GHz,内存为3 GB,软件环境为MATLAB R2014a。根据文献[14]设置参数Γ=2.0,窗口尺寸区间定义为H={1,2,3,4}。
图1(a)是大小为100×100像素的高斯平面绝对相位图;对(a)的相位进行相位缠绕后得到其折叠相位图如(b)所示;(c)是添加了μ=0,σ=0.5的高斯噪声的折叠相位图;(d)是由最小二乘法进行相位展开的绝对相位图;(e)是由ICI准则获取的窗口尺寸参数,在一阶多项式是很好的近似数据的区域中选择较大的窗口,反之亦然;(f)是采用本文方法进行相位解包裹的绝对相位图。对比相位展开结果图,可以明显观测到LIDLS有效地减小了噪声对相位展开的影响。
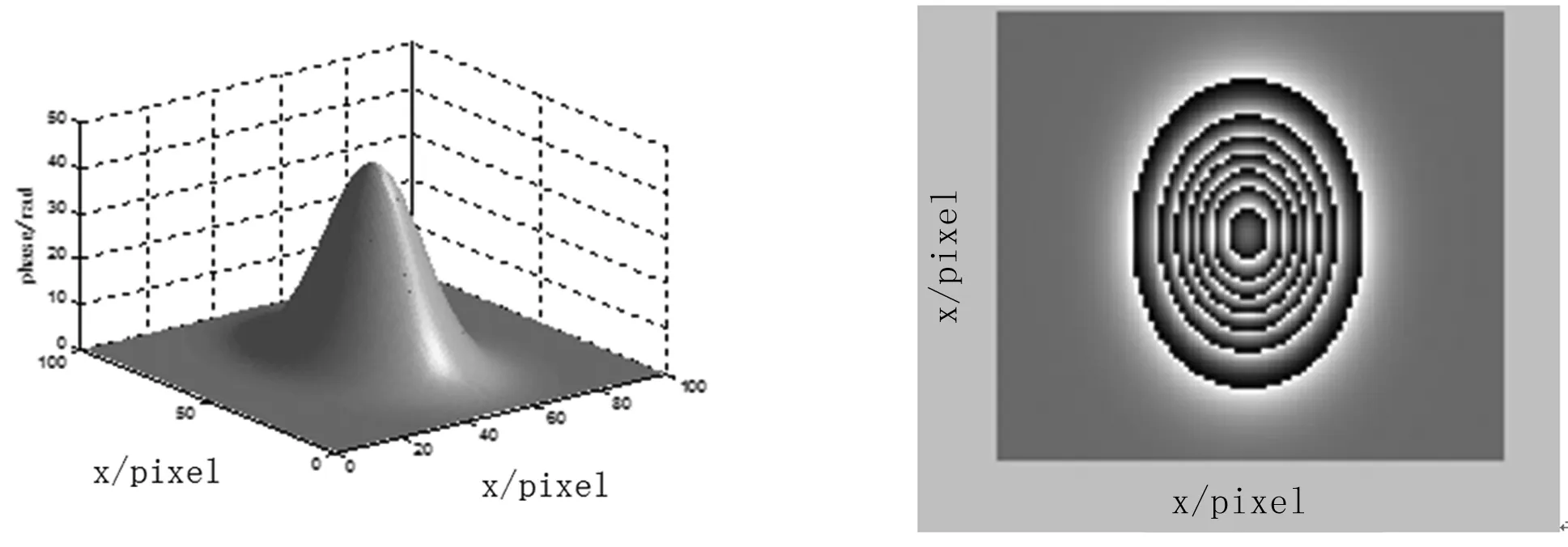
(a) 原始相位平面 (b) 折叠相位
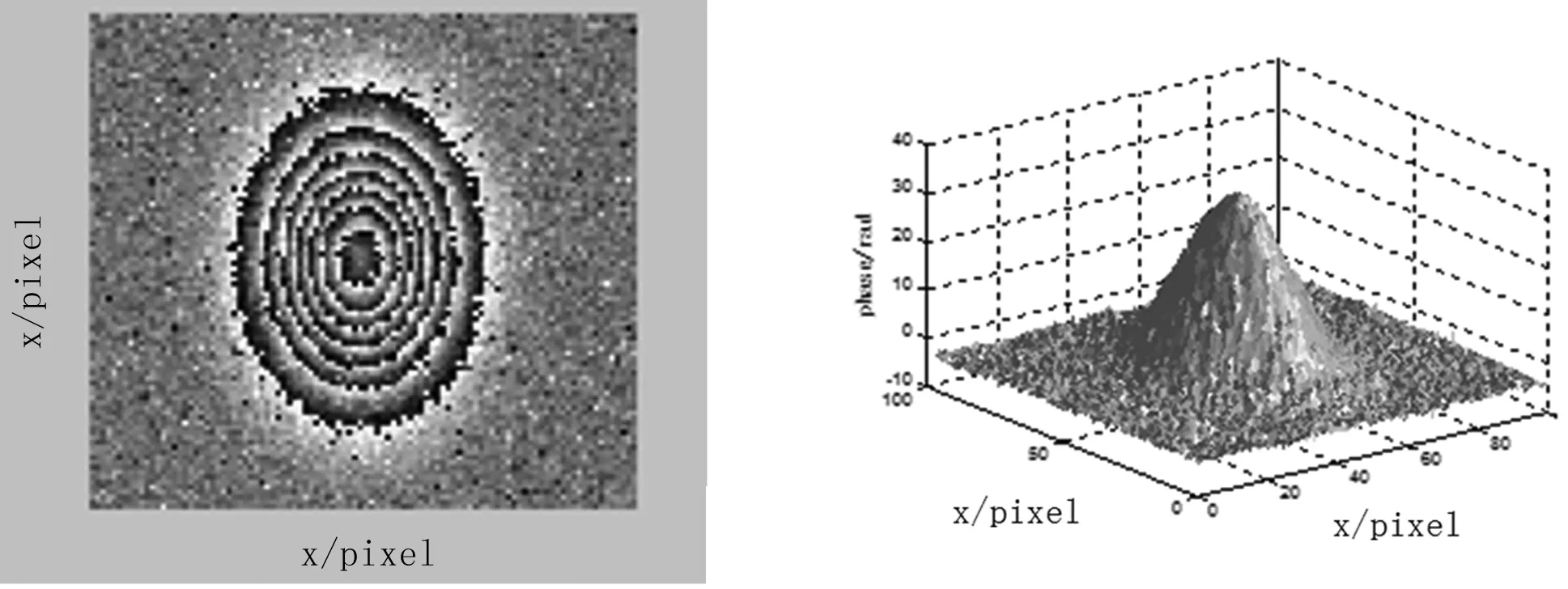
(c) 添加高斯噪声(σ=0.5) (d) DCT-LS展开缫
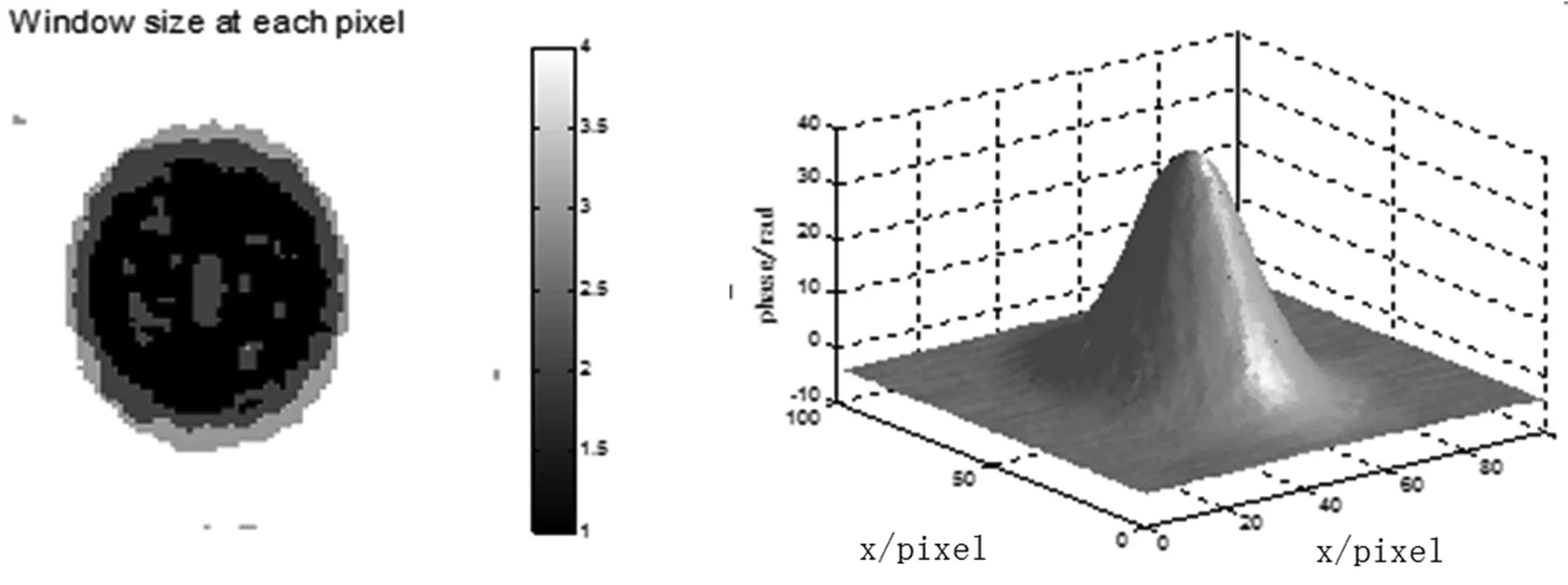
(e) ICI给出的窗口参数h (f) LIDLS展开结果图1 高斯平面仿真结果(σ=0.5)
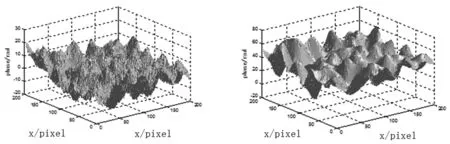
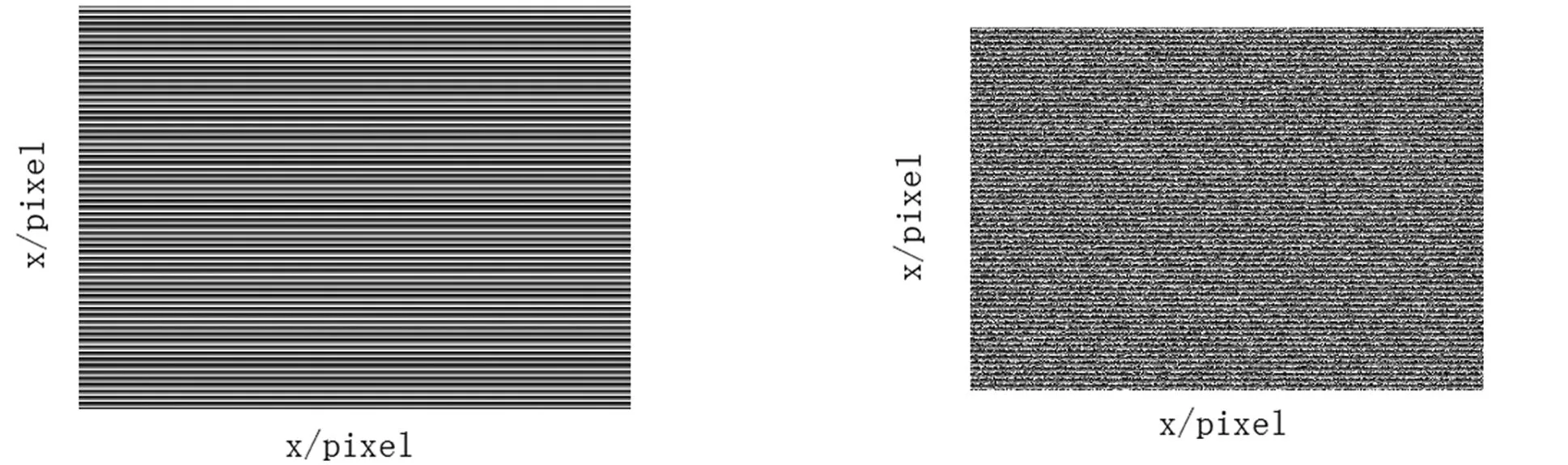
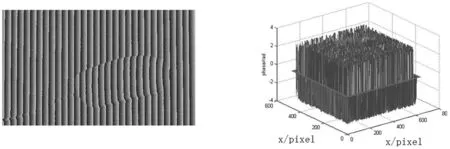
为了验证本文方法的有效性,图2(a)是大小为200×200像素的随机高度的相位折叠图;(b)是对(a)的相位进行相位缠绕后,添加了μ=0、σ=0.75的高斯噪声的折叠相位图;(c)是由最小二乘法进行相位展开的绝对相位图;(d)是PEARLS相位展开法进行相位展开的结果;(e)是LIDLS进行相位解包裹的绝对相位图;(f)是选取一行(i=120)相位值进行比较的示意图。对比发现,LIDLS有效地抑制了噪声的影响,比LS和PEARLS的展开结果更接近于原始相位图。
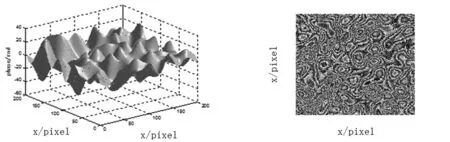
(a) 原始相位平面 (b) 添加高斯噪声的折叠相位(σ=0.75)
(c) DCT-LS相位展开结果 (d) PEARLS相位展开结果
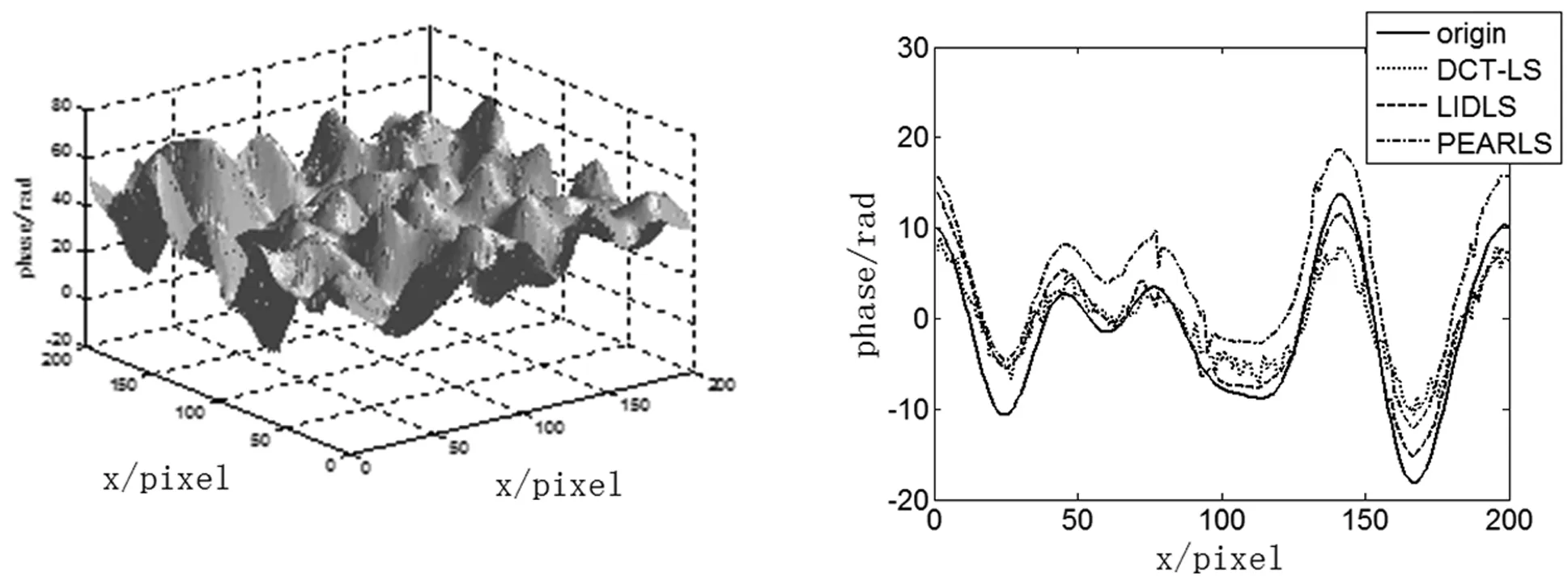
(e) LIDLS展开结果 (f) 结果比较(i=120)图2 随机高度仿真结果(σ=0.75)
本文算法的实现系统是光栅投影系统,其相位展开图类似一个斜面。图3(a)是大小为400×400像素的斜面的折叠相位图;(b)是添加了μ=0、σ=0.75的高斯噪声的折叠相位图;(c)是由ICI准则获取的窗口尺寸参数;(d)是LIDLS进行相位解包裹的绝对相位图。由结果可以看出,LIDLS可以有效地恢复出斜面。
(a) 折叠相位 (b) 添加高斯噪声(σ=0.75)
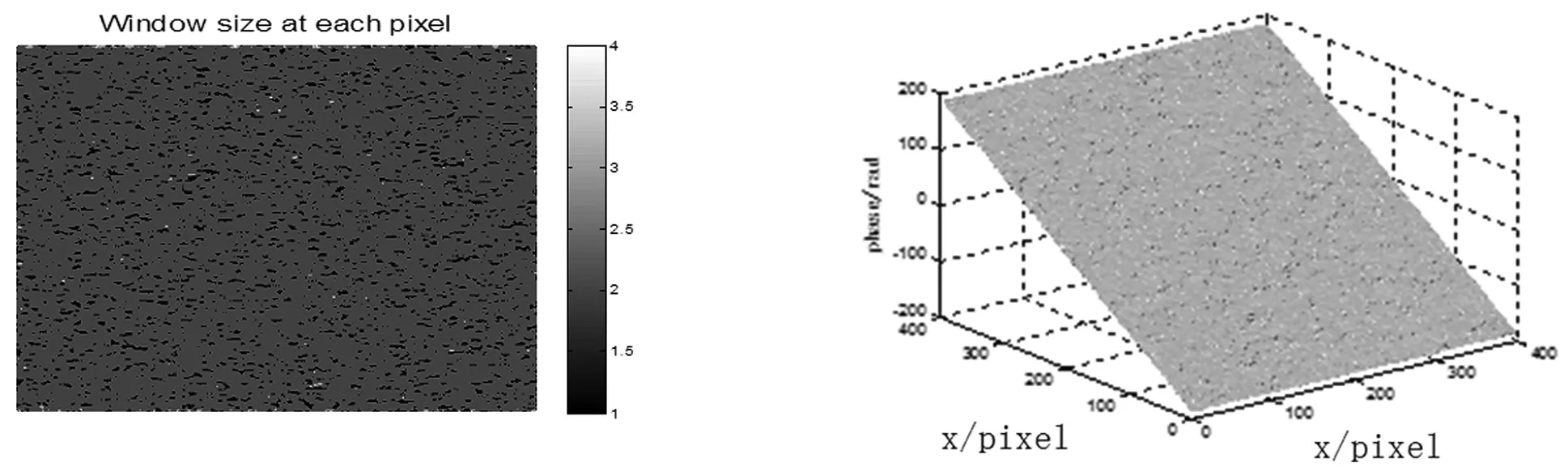
(c) ICI给出的窗口参数h (d) LIDLS展开结果图3 斜面的仿真结果(σ=0.75)
通过上述结果展示,可以看出本文方法能有效地从噪声中恢复出绝对相位信息。为了定量分析上述各方法相位展开的效果,可以计算相位展开后的相位估计值与原始相位的均方根误差[14](RSME)值,其表达式为:
(22)

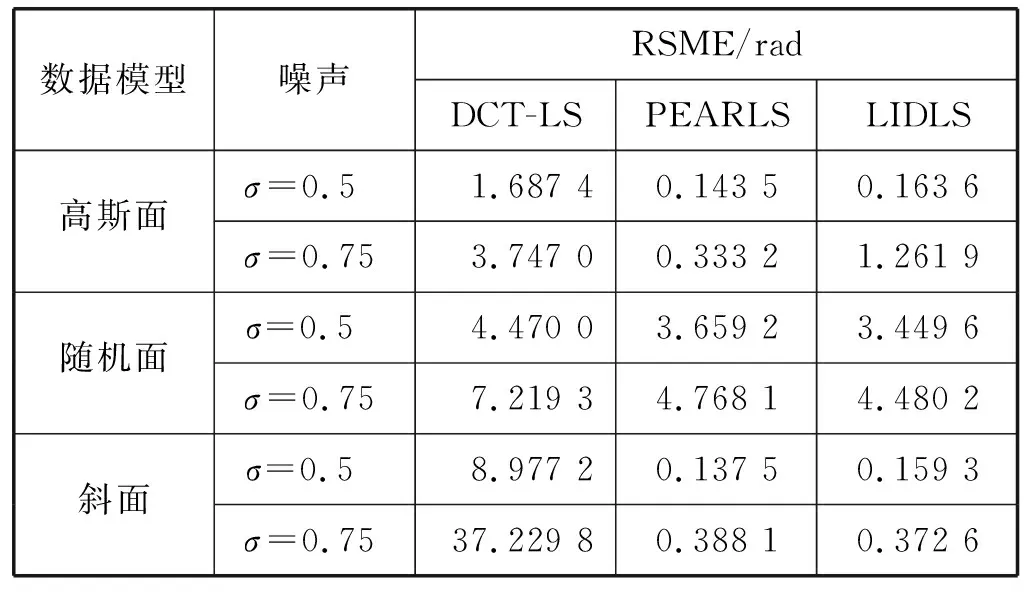
表1 相位展开结果的RSME值
通过表1,可以发现PEALS算法也可以有效地抑制噪声。为了进一步分析本文的性能,表2给出了三种方法的耗时,结合表1的数据可以分析出,PEARLS算法在相位展开时对噪声的抑制有明显效果,但当图像大小增大时,PEARLS算法的耗时增长时长量特别大,而LIDLS在耗时上有明显的优势。
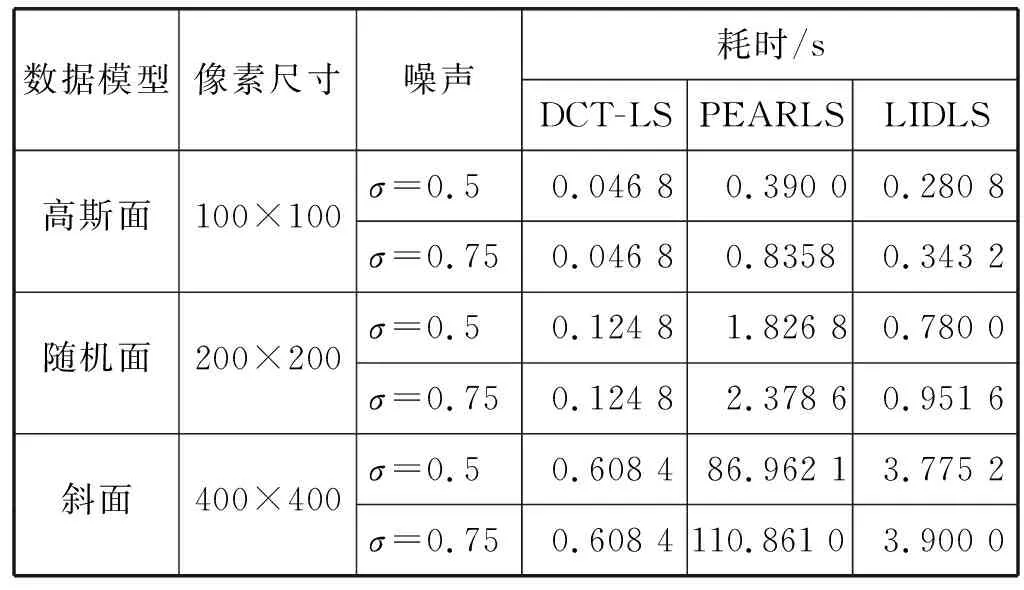
表2 各算法的相位展开耗时
3.2 实验结果及分析
为了验证本文方法的实用性,采用光栅投影测量系统进行实验,采用NEC投影仪向投射光栅周期为16像素的黑白条纹图,用工业相机获取灰度图像,图像大小为640像素×480像素。获取实物光栅投影图,如图4(a)所示;待测量物体为普通鼠标,采用相移法得到的折叠相位图,如(b)所示;为了分析相位展开法抑制噪声的性能,添加σ=0.5高斯噪声,如(c)所示;(d)为DCT-LS的相位展开结果图;(e)为ICI给出的本次实验的窗口尺寸参数示意图;(f)为PEARLS相位展开结果图;(g)为LIDLS的相位展开结果图,根据高度-相位差公式计算出高度值;(h)给出了鼠标的三维点云视图。实验结果定性分析,可以看出相位展开结果有显著的抗噪声能力。
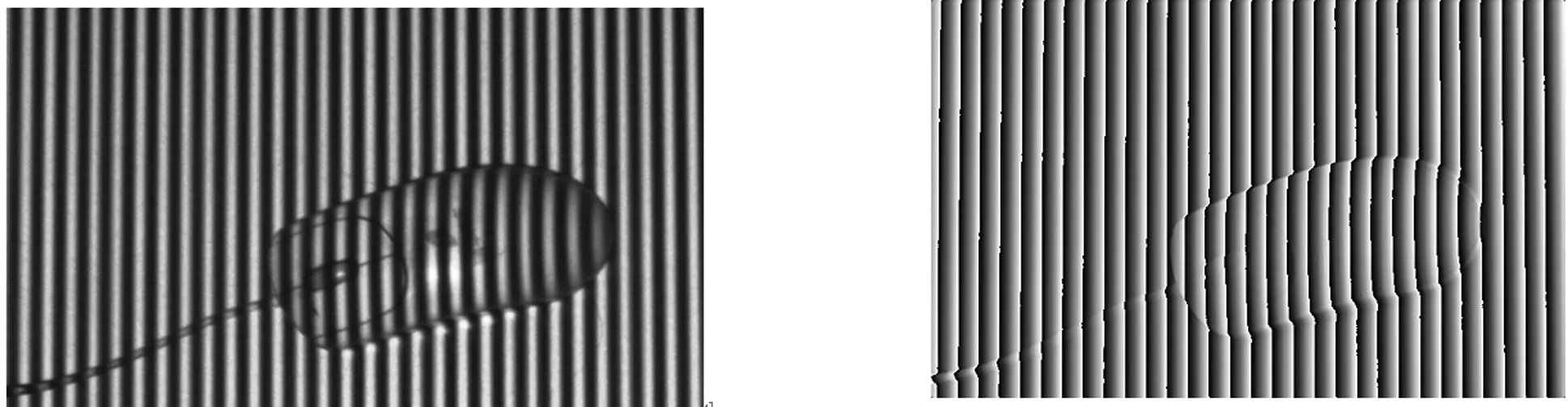
(a) 光栅条纹图 (b) 折叠相位
(c) 添加高斯噪声(σ=0.5) (d) DCT-LS展开结果
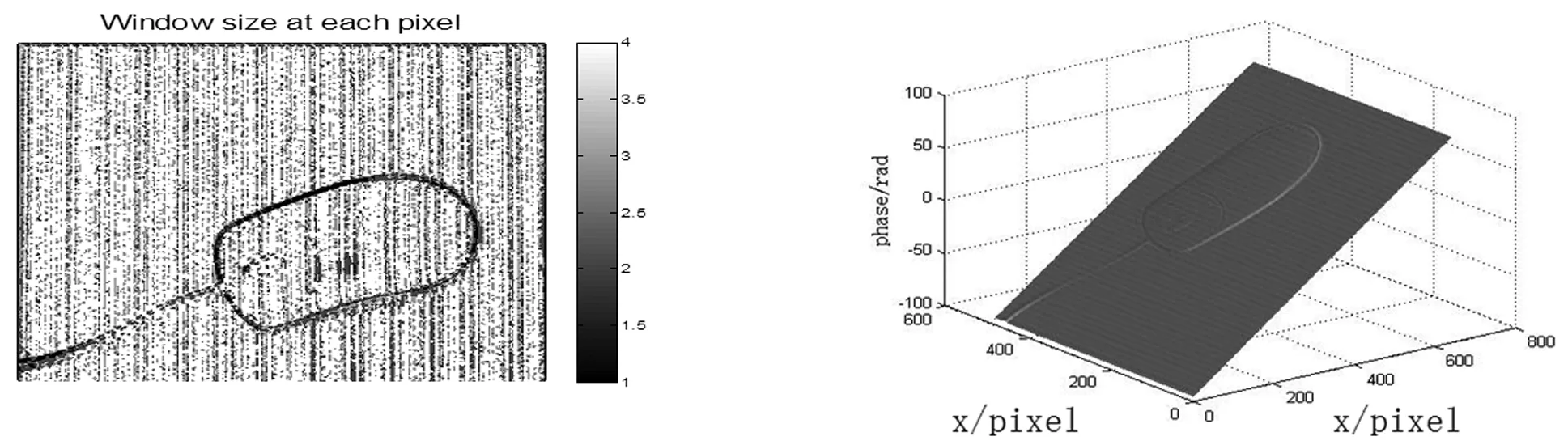
(e) ICI给出的窗口参数h (f) PEARLS展开结果
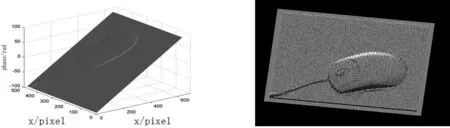
(g) LIDLS展开结果 (h) 点云视图图4 实验结果
表3给出实验结果,其中RSME值是对展开后的相位值进行再包裹后,与图4(b)所示的折叠相位相较的结果。数据表明,本文方法比DCT-LS有明显的抗噪能力;略低于PEARLS的效果,但耗时很短。
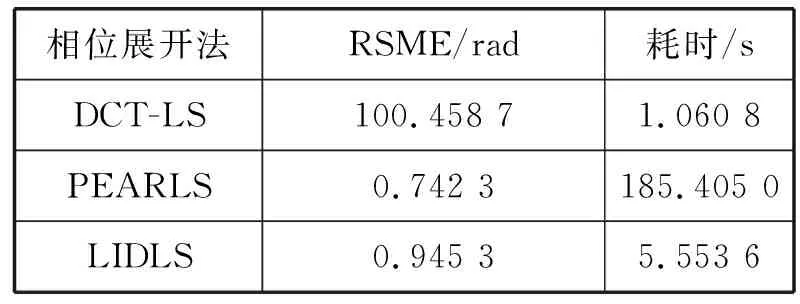
表3 各相位展开法的性能对比
3.3 性能分析
1) 抗噪性能分析 图5将上述实验结果进行统计,绘制RMSE-SNR关系图,可以看出DCT-LS只对SNR高于12 dB的折叠相位有效展开,LIDLS可以对SNR高于3 dB的折叠相位进行有效展开,抗噪能力显著提升。
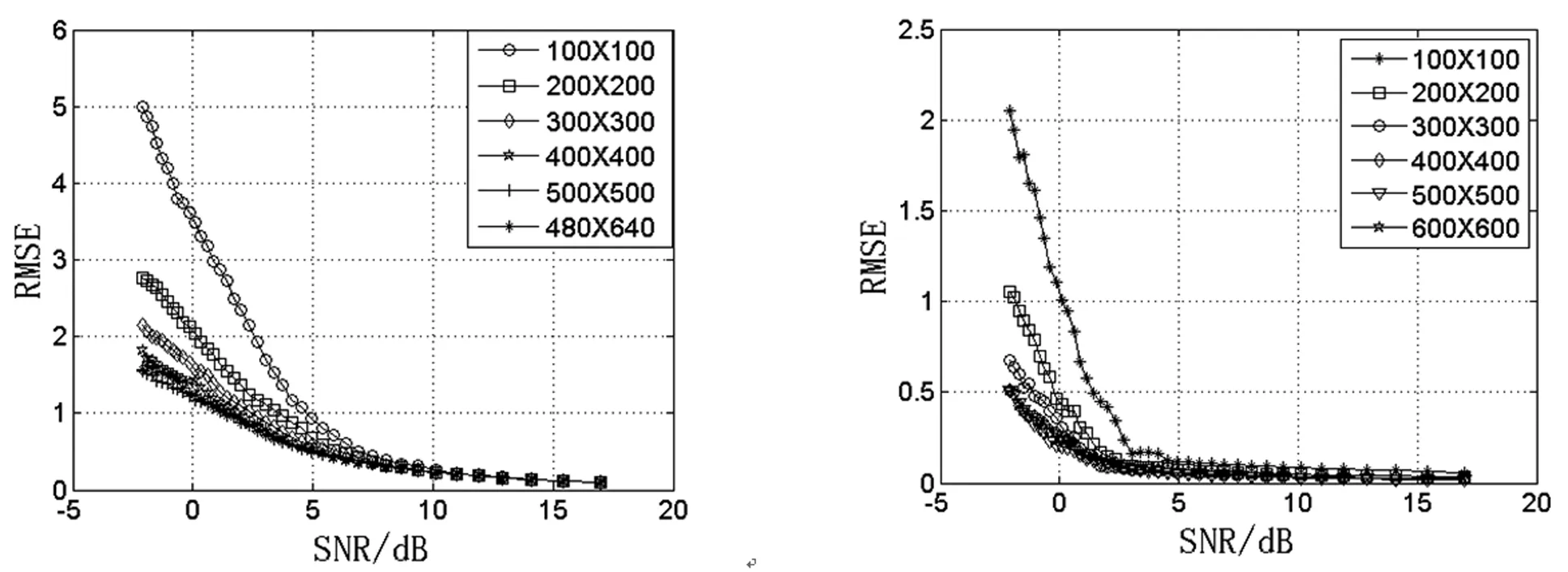
(a) DTC-LS展开不同尺寸图像的RMSE (b) LIDLS展开不同尺寸图像的RMSE
(c) DTC-LS展开不同模型的RMSE (d) LIDLS展开不同模型的RMSE图5 不同平面的RMSE-SNR关系图
2) 耗时性能分析 在3.1和3.2节的结果分析中得知,LIDLS抗噪能力接近于PEARLS。为了进一步比较算法性能,图6给出三种方法对折叠相位处理时间消耗和噪声值的关系图。结果表明,在同样的噪声情况下,LIDLS比PEARLS在时间消耗上有数量级的改善。
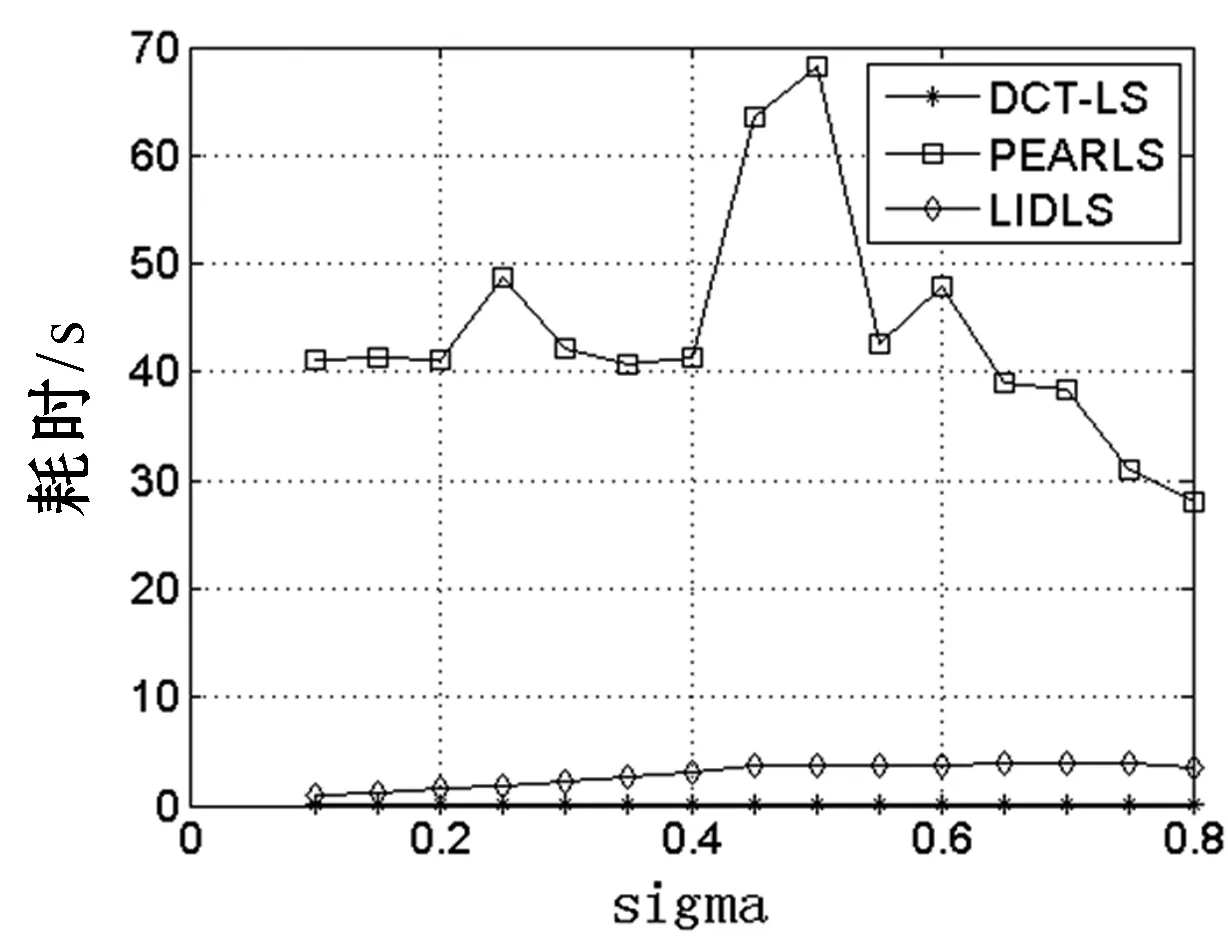
图6 三种算法的时间消耗对比图
4 结 语
本文讨论了光学三维测量中的相位展开的方法,介绍了基于DCT的最小二乘法。针对该算法在相位展开过程中过度平滑噪声导致误差传递的问题,提出一种采用LPA-ICI的最小二乘相位展开法。该方法首先获取的折叠相位,然后自动调整窗口尺度进行LPA-ICI算法去除噪声,直至获取满意的滤波相位图,最后结合最小二乘法完成相位的展开。从实验结果可以看出,本文的方法在精度上有了明显的提高,具有良好的准确性;而在消耗时间上,比同样采用LPA-ICI算法的PEARLS相位展开法有可观的减小,适合工程上三维测量的应用,具有良好的实时性。同时,给出了大量的仿真实验数据,证明了该方法具有实用性。
