汽车电动转向系统基本助力电流特性设计研究
2018-09-26侯训波杨启富卢杰汪超刘丹沈岱武
侯训波,杨启富,卢杰,汪超,刘丹,沈岱武
汽车电动转向系统基本助力电流特性设计研究
侯训波1,杨启富2,卢杰3,汪超3,刘丹3,沈岱武4
(1.大连创新零部件制造公司,辽宁 大连 116620;2.力帆新能源汽车公司,重庆 400707; 3.奇瑞商用车(安徽)有限公司,安徽 芜湖 241006;4.奇瑞新能源汽车技术有限公司,安徽 芜湖 241002)
文章介绍电动助力转向系统的控制原理和基本助力电流特性的设计方法,并将转向手力特性要求纳入其中进行设计研究,结合实车应用参数对所设计的助力电流特性开展验证,分析整车供电电压、EPS电机参数及工作温度等影响因素,来确认EPS电机选型及匹配设计参数等是否合理,指导工程技术人员修正设计,并提出合理的EPS系统应用条件。
电动助力转向系统;助力电流特性曲线;随速助力;随速手力控制;随速变扭矩死区
前言
现代汽车配装电动助力转向系统(简称EPS)已非常普及,该系统可使驾驶员操纵转向轻便,能及时准确地执行转向操纵指令,并能正确地反馈路面信息,让驾驶员及时掌握车辆的行驶状态,以便判断并作出适宜的转向操作指令。如图1所示[1],EPS系统主要由转向轴、转矩传感器(提供转向手力扭矩信号T)、电控单元(简称ECU)、转向助力电动机(简称EPS电机)、机械减速增扭机构(简称减速器)、机械转向器等组成[1]。
EPS系统的基本工作过程如下:转向时,ECU根据转向盘转矩、车速、电机的端电压和电流等信号,进行汽车的转向状态判断,然后发出控制指令来驱动EPS电机,使电机按转向盘转动的速度和方向产生所需要的助力转矩,协助驾驶员进行转向操作[1]。
现代人们对汽车转向手感等性能要求越来越高。一个好的电动助力转向系统应该具有较好的自适应能力,应该尽可能的去适应驾驶员的驾驶习惯,能够将好的路感和轻便性进行实时调节[2]。这就要求EPS系统具有在低速时转向轻便,而高速时转向沉稳等特点。因此,通过本文对EPS基本助力电流特性曲线设计,将转向手力特性要求纳入其中进行研究分析,指导工程技术人员结合汽车供电电压、EPS电机参数及工作温度等因素,来检验分析各参数设计的合理性。
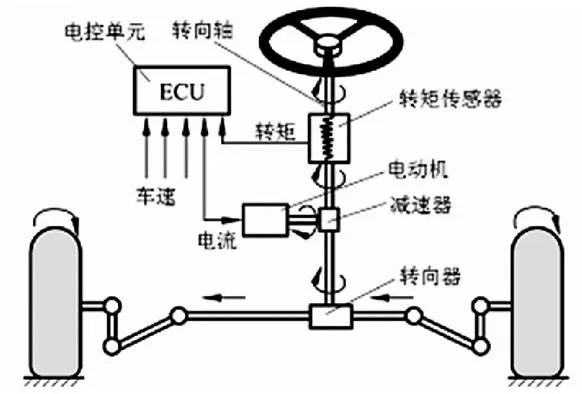
图1 EPS系统结构示意图
1 EPS系统控制原理
如图2所示,当ECU接收到车速信号V和转向盘的扭矩信号T及转动方向,由ECU软件按预设的基本助力电流特性曲线,获得目标电流I,再以目标电流I所对应PWM占空比形式向EPS电机加载电压,并驱动电机运转且输出扭矩Tm,再经减速器放大而输出助力扭矩Ta,当叠加转向手力T后,使EPS系统获得较大的总输出扭矩Tc=Ta+T,将其传递给转向器,即可推动车轮转向;在以上控制过程中,ECU对电机电流要实时检测,获得EPS电机实际电流Im,与目标电流I进行对比求差,并进行PI闭环控制来修正EPS电机实际电流Im,使其跟踪目标电流I,实现EPS系统的助力功能,而减轻驾驶员的转向手力。
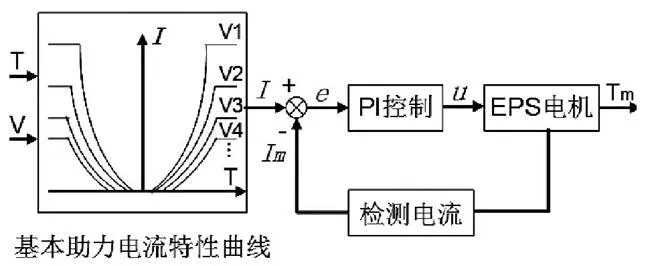
图2 EPS系统控制原理简图
2 基本助力电流特性曲线设计方法
2.1 EPS系统特性曲线结构形式
EPS系统特性曲线是指在汽车转向过程中,由转向手力所形成的助力曲线和电流曲线,通常为直线型、折线型和曲线型三种类型[3~4]。其中曲线型特性在感应车速的同时,每条曲线自身又能感应高、低手力输入区域的变化,是理想的EPS系统特性曲线形式[3]。如图3所示,本文以曲线型EPS系统特性进行研究,并以右侧区域转向的曲线形式来概括表达,而左侧区域的曲线在设计要求上是以原点完全对称的。
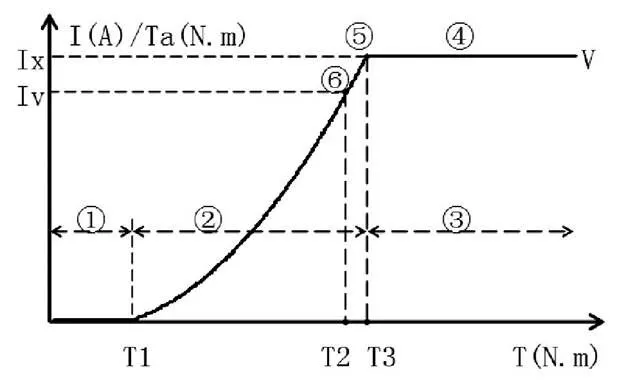
①无助力区或电流死区,②助力变化区或电流变化区,③助力不变区或称饱和区,④饱和助力或饱和电流,⑤饱和拐点,⑥额定点
根据以下EPS电机输出扭矩关系式(1)和减速器传递助力扭矩关系式(2),可看出EPS系统的助力扭矩Ta和电机电流Im是线性关系,又根据EPS系统控制原理可知,电机电流Im实时被跟踪并逼近目标电流I(通常称:助力电流,是设计参数),故EPS系统基本助力特性等效于基本助力电流特性。因此,实现EPS系统的助力功能,关键在于ECU程序中基本助力电流特性曲线的设计,并随车速变化,以曲线族的方式进行描述,如图4所示。
EPS电机输出扭矩关系式:

减速器传递助力扭矩关系式:

式(1)和(2)中,Kt—电机转矩常数N.m/A,Tmf—电机摩擦损失N.m,—EPS减速器传动比,—EPS减速器传动效率。
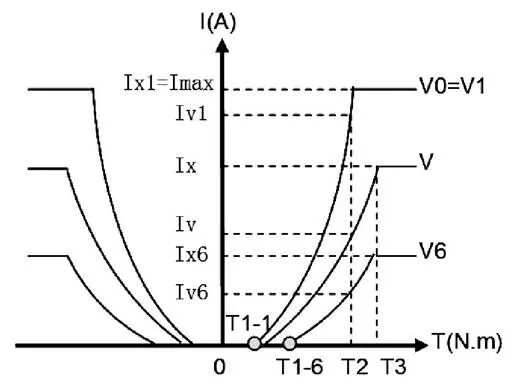
图4 基本助力电流特性曲线族结构示意图
2.2 随车速变化而设计额定助力电流Iv曲线
根据转向负载要求,先绘制出汽车所需求的转向器输出齿条力FR 或EPS系统输出扭矩Tc的额定值百分比特征点;该需求的特征点,具有随车速变化的特性,它体现了汽车转向负载的随速衰减性。再根据以上关系式(1)、(2)和以下关系式(3)、(4),可将特征点需求的齿条力FR或EPS系统输出扭矩Tc等效地转化为所需求的额定电流特征点,如图5所示。
转向器输出齿条力应满足关系式:

EPS系统输出扭矩应满足关系式:

式(3)和(4)中,C—转向器线角传动比mm/r,η—转向器传动效率%,T—EPS机械摩擦N.m。
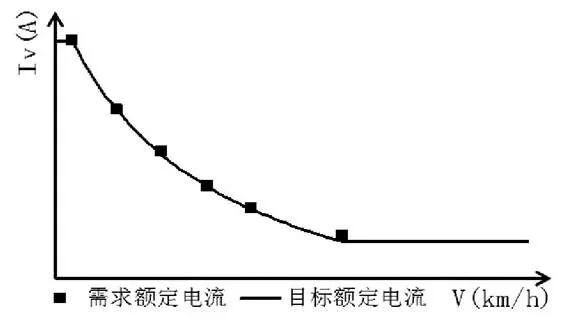
图5 额定电流特性曲线示意图
如图5所示,可利用拟合方程组逼近设计所需求的额定电流特征点,从而设计出满足要求的额定电流目标曲线;该目标曲线要包含汽车需求的特征点以及未规定的各连续特征点,即可实现EPS系统在低速时较大输出实现转向轻便性,在高速时较小输出实现较强路感。满足上述要求的拟合方程组如下关系式(5),通过调节系数s2将曲线逼近设计所需求的特征点,此时额定电流Iv曲线就基本等效于汽车转向负载所要求的转向器齿条力FR或EPS系统输出扭矩Tc的额定值,该Iv曲线也成为助力电流特性曲线的设计基础。
额定电流设计目标曲线表达式:
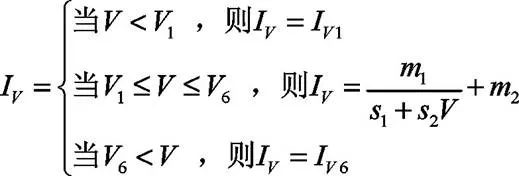
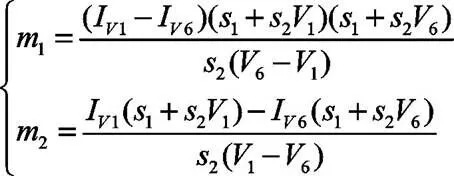
式(5)中,车速V1、V6和额定电流Iv1、Iv6为已知特征点,s1、s2是助力随速衰减系数,为标定参数(其中s1为常数1,s2=0~0.5),m1、m2是根据已知匹配参数而计算获得的参数,其表达式如下:
2.3 基本助力电流特性曲线设计方法
1)额定电流的设计目标曲线,是在额定转向手力T2时所对应各车速下的额定电流。因此,设计如图6所示的额定转向手力特性曲线,就能使EPS系统具有在低速时以较小转向手力对应较大的额定电流,使转向轻便,而在高速时以较大转向手力对应较小的额定电流,使转向沉稳。

图6 额定转向手力特性曲线示意图
额定转向手力特性曲线表达式:
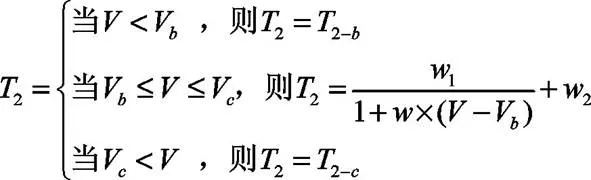
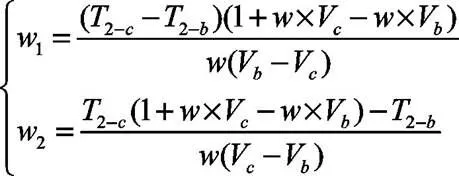
式(7)中,车速Vb、Vc和额定电流T2-b、T2-c为已知匹配参数,w是转向手力随速增益系数,为标定参数(w=-0.015~ 0.05且w≠0),w1、w2是根据已知匹配参数而计算获得的参数,其表达式如下:
2)额定电流设计目标曲线和额定转向手力特性设计曲线均与车速有对应关系,因此可映射出额定电流和额定转向手力同时在T – I坐标系中的对应关系,如图7所示。

图7 额定转向手力与额定电流的映射关系示意图
3)如图7所示,死区扭矩T1在T1-1~T1-6之间随车速V进行变化,该变化体现了低速时死区扭矩的设定值较小,有利于助力电流迅速越过死区进入较高电流区域,使转向操作轻便,而在高速时死区扭矩的设定值较大,有利于高速助力电流升值减缓,增强路感,同时避免了直行期间由于高速路面不平颠簸,使转向在死区与助力区间反复切替而产生转向盘振动,也使中位指向性更清晰。死区扭矩随速变化的设计曲线如图8所示。
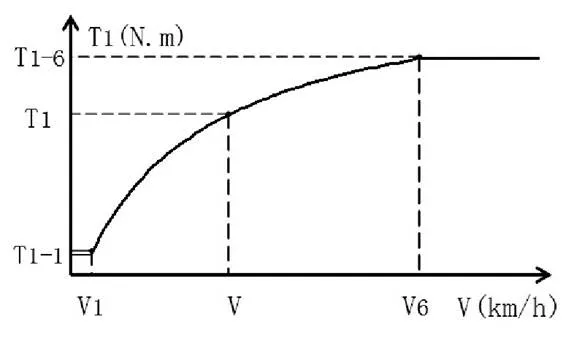
图8 死区扭矩随速变化曲线示意图
死区扭矩设计曲线表达式:
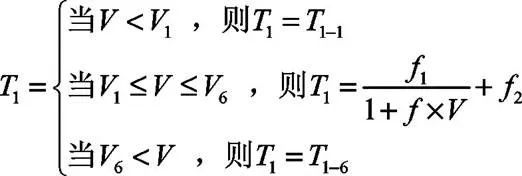
式(9)中,车速V1、V6和死区扭矩T1-1、T1-6为已知特征点,f是死区随速增益系数,为标定参数(调节范围:f= 0.001~ 0.2),f1、f2是根据已知匹配参数而计算获得的参数,其表达式如下:
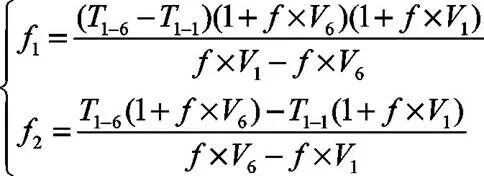
4)以上与车速相关的额定电流Iv、额定转向手力T2、死区扭矩T1设计完成后,即可绘制如图7所示的T-I坐标系中基本助力电流特性的设计曲线族。
基本助力电流特性设计曲线表达式:

式(11)中,Ix、IT为过程参数,其表达式如下:

式(12)中,Imax、Va、T3为已知经验参数,a、b、c为过程参数,其表达式如下:
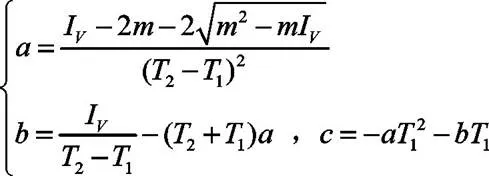
式(13)中,m是随转向手力变化的增益系数,为标定参数(调节范围:m= -100.0~0.0)。
3 基本助力电流特性曲线设计及验证分析
根据上述基本助力电流特性曲线设计方法,将其所归纳的规律、算法及公式,在Excel电子表格环境中开发VBA程序来驱动EPS选型参数计算分析。依此,可将客户整车转向要求进行转化计算,提出EPS输出特性要求及电机选型。
如表1所示,是根据某汽车公司对整车转向负载等参数要求而估算EPS电机的对应参数,并初步选型某公司生产12v-220w的有刷电机,其主要参数如表2所示,其输出特性曲线如图9所示,依此进行EPS基本助力电流特性的设计及验证分析。
表1 某整车基本转向参数要求和对应EPS电机参数
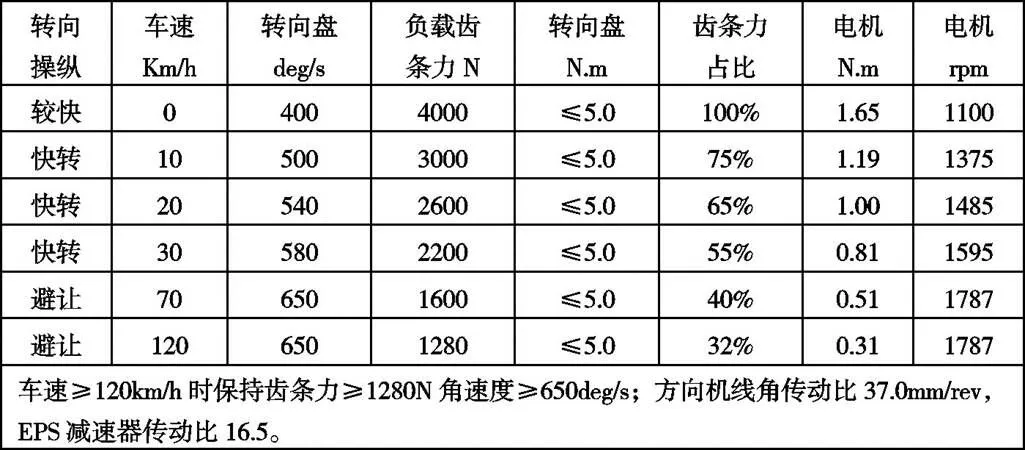
表2 12v-220w EPS有刷电机主要参数
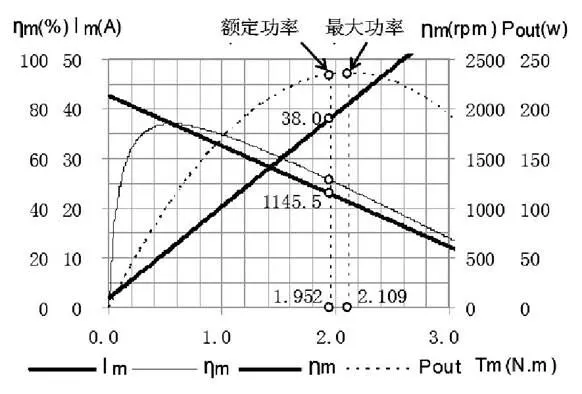
图9 EPS电机输出特性曲线
3.1 基本助力电流特性曲线设计
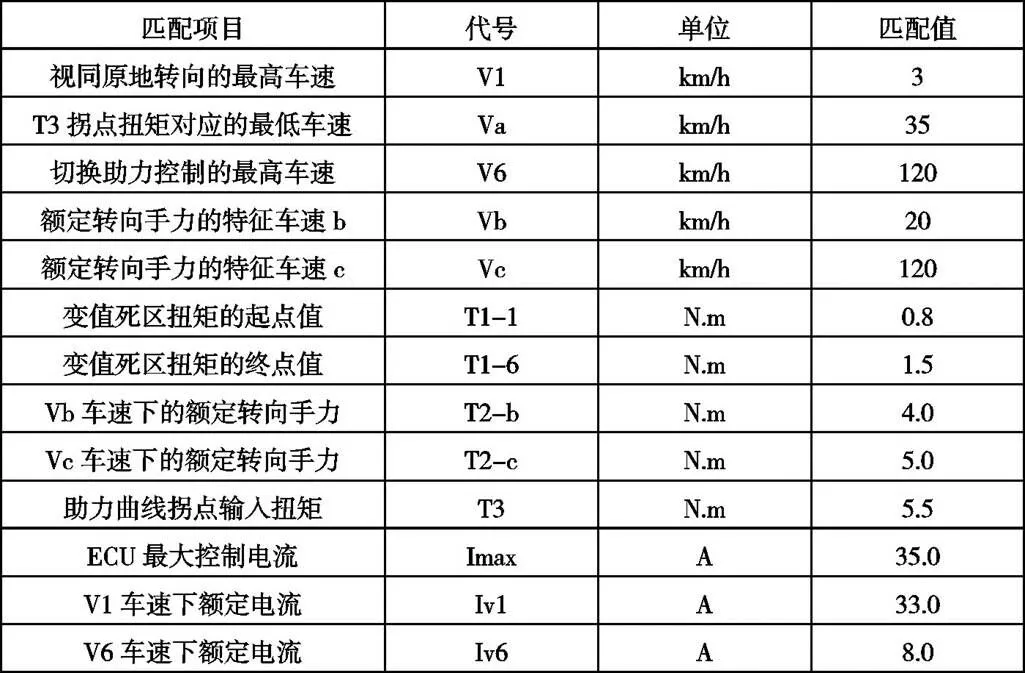
1)EPS基本助力电流特性曲线设计,要与整车转向相关联的物理参数相匹配,并兼顾不同车速和转向手力的配合协调。例如,整车用户提出车速在0~3km/h范围内,EPS能发挥同等的最大助力效果,因此需设定“视同原地转向的最高车速”V1=3km/h;再例如,整车用户期望车速较低时转向手力较轻,而车速较高时则转向手力较重,因此需设定“额定转向手力的特征车速b/c”Vb=20km/h和Vc=120km/h,以及“Vb/Vc车速下额定转向手力”T2-b=4.0N.m和T2-c=5.0 N.m,即在20~120km/h区间随车速增高而转向手力由4N.m增至5N.m。总之,结合某汽车公司的整车转向要求,实际确定了如表3所示的EPS特性匹配设计参数。
表3 EPS基本助力电流特性匹配设计参数表
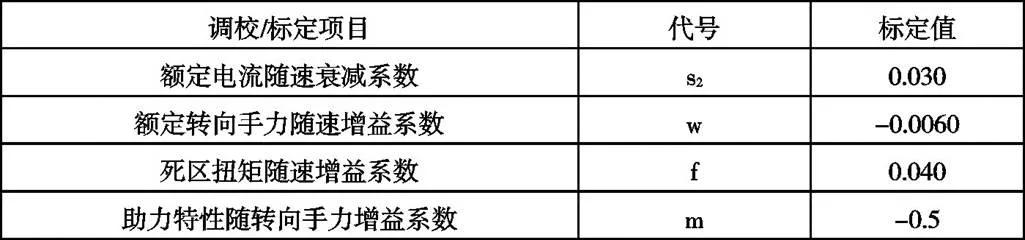
2)EPS基本助力电流特性曲线设计,还要考虑与整车调校/标定的环节。助力电流特性曲线的标定,通常是在实车上且在规定的路面下,分别标定对应不同车速下(通常6个车速)的助力电流特性曲线,以评价转向手力及其手感等,来确定合适的助力电流特性曲线族谱。因此,需设定如表4所示的调校/标定系数,并向标定工程师开放,这样就可通过上位机与ECU通讯,使标定过程可视化,将助力电流特性曲线与转向手力信号和车速信号进行关联调校。
表4 EPS助力特性调校/标定参数表
3)根据表3和表4所确定的特性参数,设计如图10所示的不同车速V下EPS系统基本助力电流特性三维曲线族谱,并由此获得如图11所示的方向机齿条输出力曲线,依此可进行各种情况下的设计验证及分析(注:在ECU程序中将执行由此转化有限范围的三维数组,再利用插值法获得目标助力电流I值)。
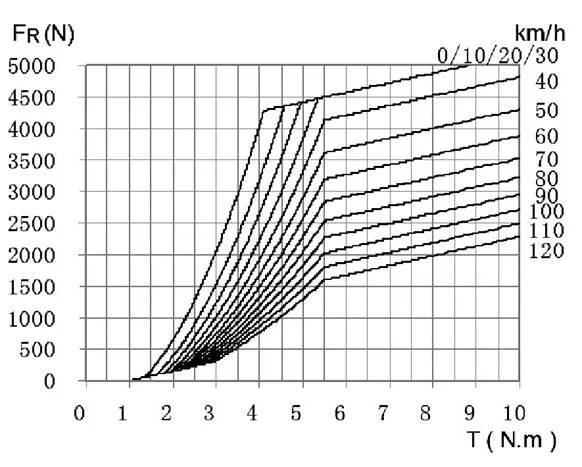
图11 齿轮齿条方向机输出力特性设计曲线
4)在整车规定转向负载、12V标称供电电压、以及在室温环境和转向盘较低转角速度等条件下,得如图12所示随车速变化的转向手力特性设计曲线。图中虚线是大角度转向时,且方向机齿条末端转向负载最大时的较重手力上限,图中实线是在转向中间位置时的较轻手力下限,故转向手力在图中上下限之间变化。
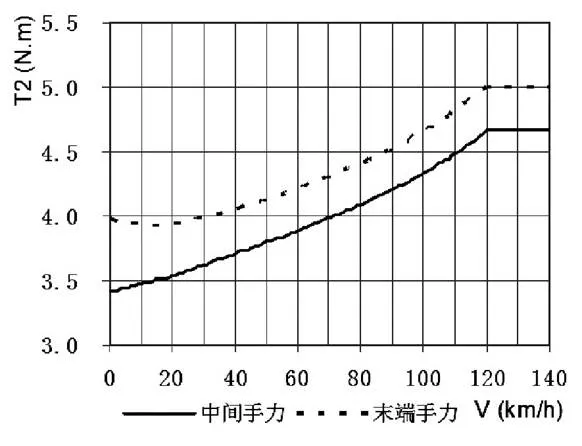
图12 转向手力特性设计曲线
3.2 基本助力电流特性设计的验证分析
1)在电机温度20℃条件下,验证EPS驱动方向机能实现的齿条力以及在不同供电电压下转向盘能实现的角速度,以便分析满足跟随性要求的对应供电电压条件,其分析数据如表5和表6所示。表5中齿条输出力和转向盘转角速度的要求是在表1整车要求基础上,进行逼近拟合而成的连续要求值,该连续值与客户要求的误差被控制在±2%范围内,可代表客户对整车转向的要求;表6中齿条输出力要求是客户规定的转向中间位置齿条力要求,对比齿条末端最大齿条力,做了调整并降低要求。
表5 在规定齿条末端位置齿条力时EPS实现的输出特性

表6 在规定转向中间位置齿条力时EPS实现的输出特性
根据表5和表6所示数据可看出,当输出齿条力较大且供电电压降至10V时,则EPS转向功能的跟随性不满足要求,而当输出齿条力较小时,则不满足跟随性要求的供电电压下降至9V。同时由表中数据还可看出,在规定转向负载下,其转向手力随速加重。
2)在车速0km/h和标称供电电压12V条件下,并以幅值580 deg/s,且在0~360 deg转角范围内的正弦半波规律操纵转向盘,验证当电机温度上升后对EPS转向手力的影响情况。在图13和图14中,θ—转向盘转角、T—实际转向手力、ω—操纵转向盘的实际转角速度、ωmax—由电机决定的转向盘最大转角速度、FR—整车转向负载齿条力。
图13和图14所示结果说明,当电机温度上升后,电机永磁铁磁感应强度下降,导致电机的电磁转矩常数和反电动势常数也有所下降。因此,图13中转向手力异常点是由反电动势较大而限制了电机转速引起的,图14中转向手力异常点是由电磁感应强度下降而使电机输出扭矩能力降低造成的。
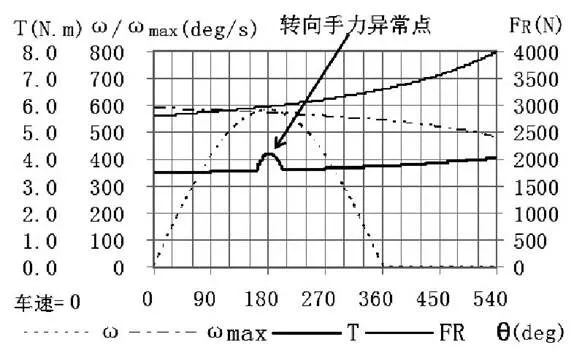
图13 在电机温度60℃时转向手力验证曲线
3)由上述验证分析可提出,使EPS正常转向所需的合理供电电压和电机温度条件如图15和图16所示。当转向盘以较低转角速度转向,且电机温度在图15所示界限曲线以下工作时,不会对转向手力产生影响;当转向盘以较快的转角速度转向,且在对应供电电压和电机温度下,就会产生EPS转向功能的跟随性不满足要求,依此EPS系统在如图16所示供电电压和电机温度的界限曲线以上工作时,就不会产生跟随性不满足的问题。
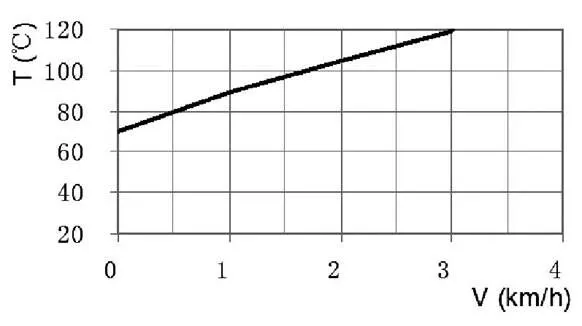
图15 电机温度对转向手力异常影响的界限
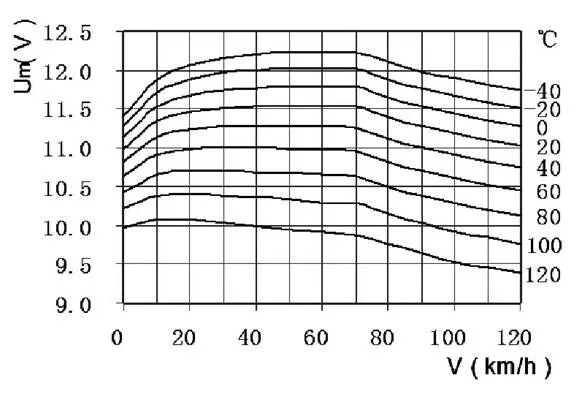
图16 电压和电机温度对EPS系统跟随性影响的界限
4 结论
根据汽车转向性能要求,对EPS系统进行合理的电机选型,并结合转向手力随速加重的要求而设计基本助力电流特性,在汽车行驶过程中实施正常转向操作时,能够实现低速转向轻便而高速转向沉稳等特点。
在本文的基本助力电流特性曲线设计方法中,考虑了汽车调校/标定的环节,使其与汽车转向状态相关的匹配参数及少量关键特征点参数进行关联设计,并将调校参数向标定工程师开放,可通过上位机与ECU通讯,使标定过程可视化,将助力电流特性曲线与转向手力信号和车速信号进行关联调校,能够实现较优的转向手感。
结合汽车规定的转向负载,通过本文对初步设计完成的助力电流特性,在供电电压、电机温度等不同工作条件下,来验证转向跟随性的方向盘角速度适用范围,同时在0~540deg转角范围内,对转向手力进行验证分析,以便确认EPS电机选型及匹配参数等是否合理,指导工程技术人员修正设计,并提出合理的EPS系统应用条件。
在操纵转向时,最大转向负载和最高转角速度同时发生的极限情况,极少出现,因此选择极限条件下均能满足要求的设计,是不恰当的。应与整车用户约定合理的转向负载等应用条件,例如:在转向中间位置和大转角齿条末端位置时,对其转向负载和转角速度区别对待,才能匹配完成较优的EPS系统方案。
[1] 夏甫根.电动助力转向系统控制策略的优化[硕士学位论文].北京:清华大学,2010.
[2] 王跃旭.电动助力转向控制器的研究[硕士学位论文].吉林:吉林大学,2012.
[3] 裴学杰,杨世文,季茜.电动助力转向系统助力特性研究[J].汽车实用技术,2014年第3期.
[4] 江浩斌,杨晓峰,宋海兵等.电动助力转向系统组合型助力特性研究[J].汽车技术,2010年第6期.
Research and Design on Assist Current Characteristic for EPS
Hou Xunbo1, Yang Qifu2, Lu Jie3, Wang Chao3, Liu Dan3, Shen Daiwu4
(1.Dalian Innovation Parts Manufacturing Company, Liaoning Dalian 116620; 2. Lifan New Energy Automobile Company, Chongqing 400707; 3.Chery Commercial Vehicle (Anhui) Co., Ltd., Anhui Wuhu 241006; 4.Chery New Energy Automobile Technology Co., Ltd., Anhui Wuhu 241002)
Introducing the control theory and design method on assist current characteristic for Electric Power Steering System (EPS). Vehicle application parameter and steering hand power requirement is taked into account on assist current characteristic for checking. Engineers will be guided to judge the matching effectiveness by analyzing supply voltage, motor parameter and working temperature. At the same time, the paper.proposes reasonable application conditions for EPS, to ensure normal steering function.
electric power steering system (EPS); assist current characteristic curve; varying boost by vehicle speed; control steering hand power by vehicle speed; varying torque dead zone by vehicle speed
A
1671-7988(2018)18-196-06
U469.5
A
1671-7988(2018)18-196-06
CLC NO.: U469.5
侯训波(1967-),男,辽宁大连人,工学学士,高级工程师,现从事汽车电动转向产品的研发工作。
10.16638/j.cnki.1671-7988.2018.18.066