一种自适应巡航控制策略设计方法
2018-09-26杨勇张茂胜
杨勇,张茂胜
一种自适应巡航控制策略设计方法
杨勇,张茂胜
(奇瑞汽车股份有限公司,安徽 芜湖 241009)
文章提出一种车辆自适应巡航控制策略,根据相对车距比设定增强信号的数值。系统基于增强信号的数值与相对车速比的大小,将对当前决策行为进行经验存储与自主学习,使系统在设定之后的行驶过程中实现自主优化。
自适应巡航;控制策略;自主学习
引言
自适应巡航控制系统(Adaptive Cruise Control,简称ACC)是一种构想于20世纪70年代末期的汽车安全辅助驾驶系统。该系统是在汽车自动巡航控制系统(Cruise Control System,简称CCS)的基础上有机地结合了汽车前部防撞预警系统(Forward Collision Warning System,简称FCWS)而形成的一种智能化车速自动控制系统[1-2]。
从结构上来讲,自适应巡航控制系统主要由车载传感设备和电子控制单元组成。传感器对前方目标车辆进行探测,并向电子控制单元发送相关数据参数,电子控制单元对收集来的数据进行分析,并作出决策,驱动执行机构以保证智能车安全的行驶状态[3-4]。
从功能上来讲,根据传感器对前方道路交通环境的感知结果,自适应巡航控制系统赋予智能车一定的“思维”。当前方无目标车辆行驶时,系统能够使智能车以特定的车速进行巡航行驶;当前方有目标车辆行驶时,系统可根据智能车与目标车辆的行驶工况以及其他设定参数对车距进行有效控制,从而保证智能车与目标车辆的安全车距,避免交通事故的发生。因此,自适应巡航控制系统减轻了驾驶员的驾驶强度,提高了智能车的主动安全性,扩大了巡航行驶的范围,改善了道路交通的通行效率[3-4]。
本文基于相对参数比对控制行车速度,当行驶参数越接近安全行驶参数时,相对参数比的值越小,对应加速度值越小,直至加速变为零,即为匀速行驶,避免由匀减速行驶直接进入匀速行驶时造成的行车安全隐患及行车的不舒适。此外,依据相对参数比进行速度的调控,在保证了安全的前提下,又最大限度的保证行车速度,节省行车时间,且有利于减缓交通压力。
1 总体设计
智能车自适应巡航控制策略设计是智能驾驶的关键技术。基于机器学习的智能车自适应跟随巡航控制系统通过实时地获取环境信息、目标车辆和智能车的行驶状态,结合系统的设定参数,判断当前决策行为的“好”与“坏”,在“奖励”和“惩罚”的经验教训中自主学习[5]。本文所要解决的技术问题是智能车自适应跟随巡航控制策略中增强信号的设定,智能车车距控制过程中相对车距比与车速调节强度之间关系曲线的设计,智能车自适应跟随巡航模式下防撞预警控制策略的设计。图1为本文所设计自适应跟随巡航控制系统的控制策略流程图。图2为智能车车距控制曲线。
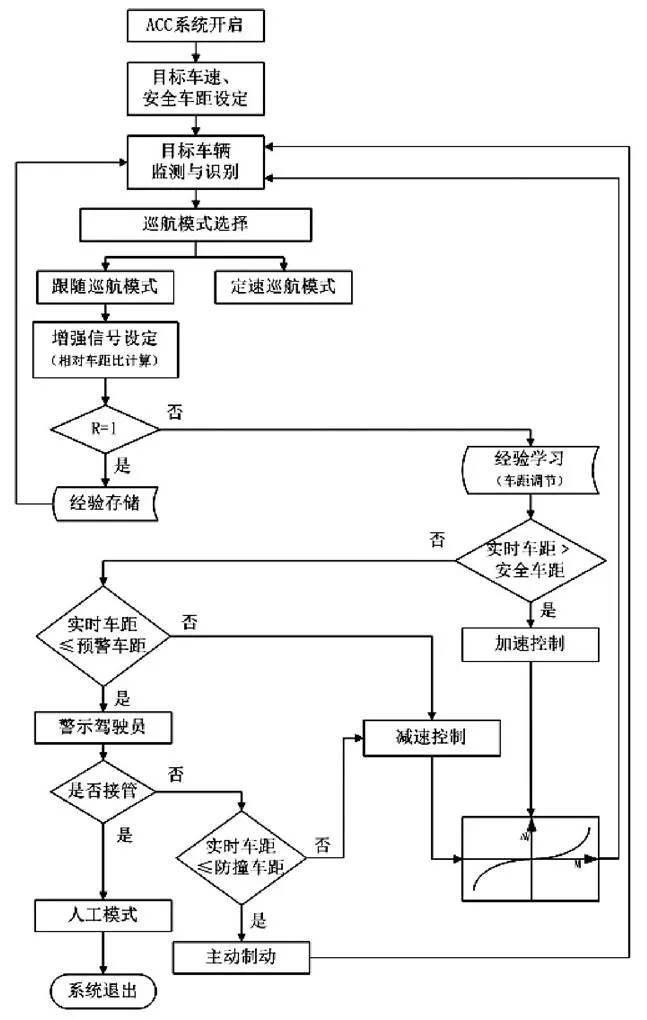
图1 跟随巡航模式控制策略流程图
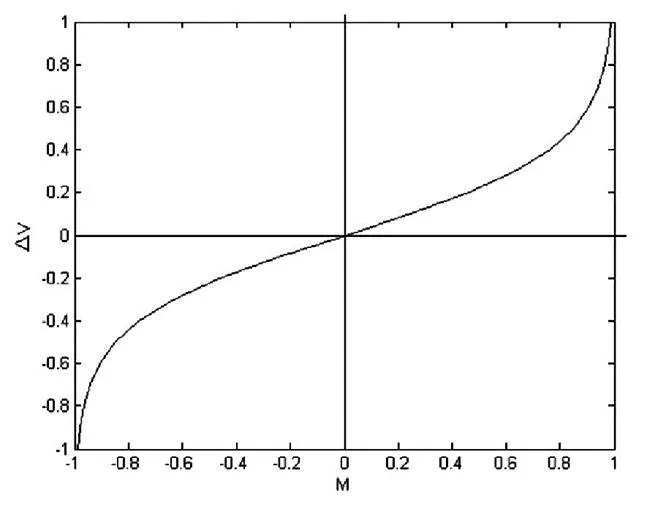
图2 智能车车距控制曲线
2 系统工作流程
为使本领域技术人员更好地理解本文所设计的控制系统,下面结合附图和具体工作流程对本其作进一步详细描述。
Step1:ACC系统开启与参数设定
D为智能车跟随巡航时的安全车距,单位为m,反映智能车驾驶员期望与目标车辆的实时车距。系统非首次开启时,可沿用上次设定参数,或重新设定。
Step2:ACC系统目标车辆的监测与识别
基于车载传感器的目标车辆的监测与识别是ACC系统实现对智能车巡航控制的基础。同时,传感器对目标车辆的监测数据也为系统提供后续决策依据。
Step3:ACC系统巡航模式的选择
ACC系统根据车载传感器的输入数据,判断巡航模式。当智能车前方没有可识别的目标车辆时,系统将进入定速巡航模式;当智能车前方存在目标车辆时,系统将进入跟随巡航模式。本文旨在设计智能车自适应跟随巡航模式下的控制策略。
Step4:ACC系统跟随巡航控制
当智能车ACC系统进入跟随巡航模式时,系统的电子控制单元将基于实时车距D,安全车距D,预警车距D,防撞车距D的关系对智能车进行加速、减速和主动制动控制,以实现智能车以安全车距对目标车辆进行跟随巡航行驶,或为了保证行驶安全而停车。具体控制流程如下(图1):
(1)相对车距比M的数值计算

其中,D为智能车与目标车的实时车距,单位m。
(2)增强信号R的设定
以相对车距比M的变化值∆=0.1为一个区域,将相对车距比划分为若干个区域。以M=0为中心,向两边设定增强信号(折算因子取α=0.8,增强信号以指数形式递减)。其中, |M|≤0.05时,R=1,表示系统将获得最大的增强信号; 0.05<|M|≤0.15时,R=0.8,以此类推增强信号将以指数α=0.8向两边递减。
(3)控制逻辑判断
根据R和M的值进行跟随巡航控制系统的逻辑判断,当R=1时,表明系统正在以最优的车距进行巡航行驶,该数据将被作为经验存储,其他情况下,系统将根据增强信号的大小进行车距调节与经验学习。
(4)车距调节策略
当R<1时,表明系统需要根据增强因子的大小进行车距调节,相对车距比与速度调节强度的关系如图2所示,M>0,表示系统需对智能车进行加速控制,M<0,表示系统需对智能车进行减速控制。图2所示两者的关系旨在使得相对车距值较大时,智能车能以大的加速度进行车距调节,以尽快完成车距调节过程。同理,相对车距值较小时,智能车的速度调节强度也小,以获得较好的舒适性。
(5)防撞预警策略
D
(6)控制策略学习
本文中,相对车距比既是增强信号设定的输入量,也是速度调节强度的输入量。基于相对车距比的增强信号数值的大小直接反映了智能车跟随巡航控制策略的“好”与“坏”,对于“好”的决策行为,系统将给与相应的“奖励”信号,并作为经验进行存储、记忆;对于“坏”的决策行为,系统将给与相应的“惩罚”信号,并在之后的行为决策中根据增强信号的大小进行修正与学习,使得智能车跟随巡航控制策略逐渐趋于最优。
3 结束语
基于相对车距比的增强信号数值的大小直接反映了智能车跟随巡航控制策略的“好”与“坏”,对于“好”的决策行为,系统将给与相应的“奖励”信号,并作为经验进行存储、记忆;对于“坏”的决策行为,系统将给与相应的“惩罚”信号,并在之后的行为决策中根据增强信号的大小进行修正与学习,使得智能车自适应巡航控制功能处于最优状态。
[1] Winner H, Witte S, Uhler W, et al. Adaptive Cruise Control System Aspects and Development Trends[C].International Congress & Exp -osition. 1996:1692 - 1697.
[2] 张景波,刘昭度,齐志权,等.汽车自适应巡航控制系统的发展[J]. 车辆与动力技术, 2003(2):44-49.
[3] 王地川,李斌花,谢晖,等.汽车自适应巡航控制跟随模式的仿真建模[J].计算机仿真, 2004, 21(9):164-166.
[4] 王地川.汽车自适应巡航控制跟随模式研究[D].湖南大学, 2003.
[5] 马国成.车辆自适应巡航跟随控制技术研究[D].北京理工大学, 2014.
ADesign MethodForAdaptive Cruise Control Strategy
Yang Yong, Zhang Maosheng
(Chery Automobile Co., Ltd., Anhui Wuhu 241009)
A vehicle adaptive cruise control strategy is proposed, and the enhancement signal value is set according to the relative distance ratio. Based on the numerical value of the enhancement signal and the relative speed ratio, the system will carry out experience storage and autonomous learning on the current decision-making behavior, so that the system can achieve autonomous optimization in the driving process after setting.
adaptive cruise control; control strategy; autonomouslearning
A
1671-7988(2018)18-168-03
U461.6
A
1671-7988(2018)18-168-03
CLC NO.: U461.6
杨勇(1982-)云南建水人,奇瑞汽车股份有限公司,学士,工程师,主要研究方向:智能驾驶方向。张茂胜(1990-)山东济宁人,奇瑞汽车股份有限公司,设计师,工学学士,主要研究方向:智能驾驶控制决策系统。
10.16638/j.cnki.1671-7988.2018.18.057