混合动力重型卡车构型方案与控制策略简述
2018-09-26张文博杨志刚晏强
张文博,杨志刚,晏强
混合动力重型卡车构型方案与控制策略简述
张文博,杨志刚,晏强
(陕西重型汽车有限公司,陕西 西安 710200)
近年来,混合动力汽车以其低油耗、低排放、续航里程长和生产成本相对较低等优势,成为了国内外汽车行业研究的热点。据此,预测我国重卡行业在混合动力车型上的研发也将迅速发展。混合动力重型卡车作为研发技术具有代表性的新能源车型,文章通过对其构型方案、计算模型和控制策略的简要论述,提出了一些适合重型卡车的混合动力技术路线的开发思路。
混合动力;构型方案;计算模型;控制策略
引言
汽车产业的迅猛发展,使全世界范围内的汽车保有量迅速增加,汽车数量的增加、能源的消耗又加剧了尾气排放对大气的污染。汽车发展引发的环境问题和能源危机,使人们对新能源汽车技术的关注度日益增加。新能源汽车主要包括纯电动汽车、混合电动汽车、燃料电池汽车、太阳能汽车以及其他动力类型汽车。尽管纯电动汽车是理想的交通工具,但是纯电动汽车的能源——电池,具有比质量大、比价格高的缺点,电池的成本、充电时间、寿命和电解液污染等问题限制了电动汽车的发展。燃料电池的成本高、氢的储存和运输存在技术问题,所以燃料电池汽车的应用也很少。
混动技术不受上述问题限制。近年来,混合动力汽车以其低油耗、低排放、续航里程长和生产成本相对较低等优势,成为了国际汽车界的研究热点。混合动力汽车融合了纯电动汽车和传统内燃机汽车的优点,是目前技术条件下最具发展潜力和产业化前景的新能源汽车。由于混合动力汽车结构复杂,开发混合动力汽车所涉及的构型分析、参数匹配、节能分析、电池技术、电控技术等关键技术,基本上涵盖了大多数其他新能源汽车研发过程中的通用关键技术。因此,混合动力汽车关键技术在整个新能源汽车领域中最具代表性。
相对于家用轿车、乘用客车,国内混合动力重型卡车发展较晚,属于刚刚起步阶段,但必将迅速发展,开发过程理论设计和相关技术可借鉴混合动力乘用汽车开发经验。本文通过对混合动力重型卡车构型方案、计算模型和控制策略的简要论述,提出了一些适合重型卡车的混合动力技术路线的开发思路。
1 混合动力重型卡车构型方案与特点
1.1 混合动力重型卡车构型分类
与乘用车一样,混合动力重型卡车构型有两种不同的分类方法:一、按照电能与传统能源的混合度,即驱动电机输出功率在整个动力系统输出功率的占比,分为:弱混、中混和强混,如表1所示;二、按照动力系统的结构类型及连接关系,分为:串联式、并联式和混联式。
表1 混合动力重卡按混合度分类

其中串联式构型卡车发动机与车轮之间没有直接的机械连接,发动机提供能量为电池充电或者直接为电动机提供能量,控制发动机相对容易,但由于工作过程中存在二次能量转换,其传动效率低。
并联式构型卡车发动机通过机械路径与车轮相连,发动机和电动机分别或者同时驱动,当再生制动环节或者发动机产生的能量超过驱动汽车行驶所需要的能量时,电动机像发电机一样给电池组充电。并联式构型不能实现发动机与路载之间的解耦,动力系统的控制难度相对较大,但节能效果明显,适合应用于长途物流运输车。
混联式构型卡车综合了串联和并联构型的优势,具备最大限度地提高整车的燃油经济性潜能,但控制十分复杂,成本更加昂贵。
1.2 三种构型方案的特点
1.2.1 串联式
串联式混合动力汽车由发动机、发电机和电动机三大主要部件组成。这三个动力源通过串联的方式连接在一起,其结构原理如图1所示。发动机仅用于驱动发电机发电,并不直接驱动卡车。发电机所发出的电能供给电动机来驱动整车行驶或者存储于动力电池中。
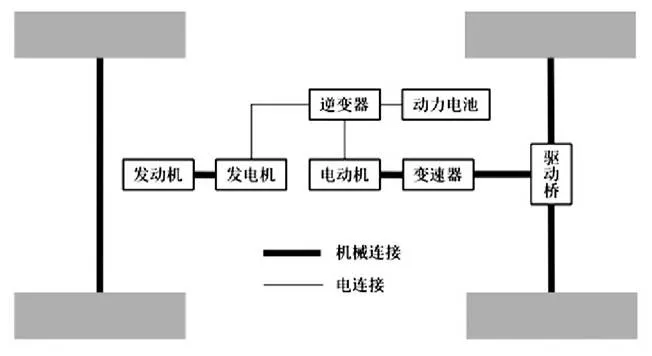
图1 串联式混合动力
发动机和发电机组成一个能量转化系统,将化学能转化为电动机需要的电能。当发动机输出的功率超过汽车行驶所需要的功率时,多余的能量被用来向动力电池充电,电动机直接驱动是唯一驱动模式。这就使发动机从路面负荷中解耦出来,能够在很大程度上减少发动机工作区间的变换频率,使控制发动机的工作状态变得相对容易,发动机可以经常保持在稳定、高效、低污染的工作区间。但是,发动机输出的机械能由发动机转化为电能,再由电动机将电能转化为机械能用以驱动卡车,经过两次能量转换,中间伴随着能量的损失。因此,一般只有在两种情况下才会选用串联式构型:(1)用于驱动能绝大部分来源于动力电池,发动机仅用于增加续驶里程的电动车;(2)发动机和电动机的综合效率超过传统能源车辆的动力传动水平。
1.2.2 并联式
并联式混合动力驱动系统中,发动机和电动机通过动力耦合装置同时与驱动轴相接,按照动力源之间的连接关系,并联式构型可分为驱动力结合式、单轴转矩结合式、双轴转矩结合式和转速结合式四种,如图2所示。

图2 并联混合动力图
与串联式相比,并联式结构具有一些明显优点:电池组容量较低,动力电池的质量和成本也就相应降低;通过优化控制策略,可使发动机以机械方式直接驱动车辆,这一传递路径减少了能量多次转换所造成的损失;当车辆所需功率较大,发动机工作状况恶化时,由动力电池及电动机通过向车辆提供补充动力来避免发动机工作区域的大幅变化,使发动机稳定工作在经济区间。
并联式混合动力汽车的工作模式及能量流动有多种不同形式,其工作模式可以分为以下四种:
纯电动模式:当车辆起步或者低速行驶时关闭发动机,此时用动态特性好的电动机单独驱动车辆,能够使发动机避开低效、高排放量工作区,提高整车燃油经济性,降低排放。
发动机单独驱动:当车辆以高速平稳运行时,可由发动机单独工作。在这种模式下,发动机工作在高效区,燃油经济性好,发动机直驱,传动效率高。
联合驱动模式:车辆急加速或者爬坡时对动力性要求较高,此时发动机和电动机均处于工作状态,电动机作为辅助动力源,提供车辆所需的功率。
制动能量回收模式:当卡车减速或者制动时,利用电动机反拖作用不仅可以有效的辅助制动,还可以使电动机以发电机模式工作,给动力电池充电,将回收的制动能量储存于动力电池中,在必要时释放出驱动汽车行驶,使整车能量利用率提高。
1.2.3 混联式
混联式构型综合了串联和并联的优点,如图3所示,其三个动力源之间具有更多的动力匹配方式,车辆具有多种工作模式,从而保证了混合动力系统在复杂工况下仍能实现最佳动力匹配。但混联式动力总成结构利用行星齿轮组作为动力耦合结构,对控制策略的要求比较苛刻,同时整车布置难度较大,解决这些难题后,混联将更具价值。
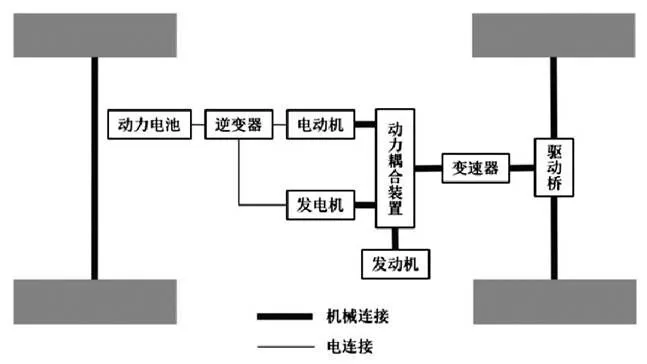
图3 混联式混合动力
2 混合动力重型卡车能量计算模型
机械传动系统及发动机能量分析模型,可应用于传统能源的重型卡车能量消耗计算,而对于混合动力重型卡车,还需要建立电系统(包括电机、逆变器及电池)的能量计算模型。混合动力车辆的能量消耗是通过各动力总成的功率积分计算得到的,因此,能量计算以研究其功率流为基础。下文以技术成熟、适合应用于重型卡车的并联式构型进行说明。
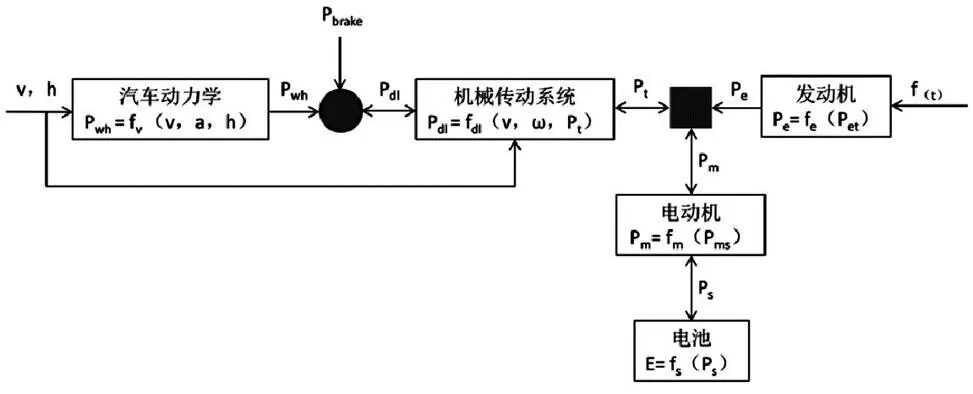
图4 并联式混合动力重卡功率流
并联式混合动力重型卡车功率流如图4所示,v、h为工况要求的车速和坡度,a、ω为工况车速计算的车辆加速度和传动系统转速,Pwh为基于汽车动力学方程fv由车速、加速度、坡度计算的车轮功率需求,Pbrake为车轮制动功率,Pdl为机械驱动系统功率要求,fdl为机械驱动系统功率损失函数,Pt为动力源总成功率需求,Pe、Pm、Ps分别为发动机、电机和电池的功率需求,fe、fm、fs分别为发动机燃油消耗函数、电机效率函数和电池效率函数,E为电池能量。
在上述功率流中,汽车动力学模型通过运行工况的车速和坡度需求计算整车驱动力,该需求驱动力传递到车轮时,受地面附着极限限制。因此,混合动力重型卡车能量计算模型包括整车动力学建模、车轮能量建模、机械传动系统建模、发动机能量建模、电机能量建模、电机逆变器建模和动力电池建模等。与传统能源车型建模相同或相近的计算模型部分,本文不再赘述,重点选择电机、逆变器、动力电池计算模型进行说明。
2.1 电机能量计算模型
以直流电机为例,电机的感应电动势与转矩满足如下关系:
E=K1Ifωr(1)
Tm=K1IfIa(2)
式中,ωr为电机转子转速,If、Ia分别为电机定子、转子电流,E为电机感应电动势,Tm为电机转矩,K1为电机结构参数常量。
电机定子、转子的电压关系如下:

式中,Ra、Rf分别为电机定子、转子电阻,La、Lf分别为电机定子、转子电感,Va、Vf分别为电机定子、转子电压。
通过上述方程,建立了电机的能量关系,即可计算其输入、输出的机械功率与电功率。也可根据其输出与输入功率的比值计算电机工作点的效率。对于电动状态,输入功率为定子电压与电流的乘积,输出功率为转子转速与转矩的乘积;对于发电状态,其方向正好相反,输入功率为转子转速与转矩乘积的机械功率,输出功率为定子电压与电流乘积的电功率。
2.2 电机逆变器能量计算模型
逆变器主要功能是通过电力电子元器件,控制电池向电机输出所需的变频电流。对于直流电机,逆变器主要是通过调节电压来控制电机电流;对于交流电机,逆变器主要是产生所需频率和相伴的相电压。因此,可以把逆变器看作是一个具有功率损失的变换设备,其功率与电压、电流的关系如下:
2.3 动力电池能量计算模型
由于混合动力汽车的能量计算要对电池SOC进行校正,即电池模型主要根据其逆变器功率需求来计算动力电池SOC。动力电池SOC定义为对其功率的积分得到其消耗的电能量,与其能量容量的比值。积分环节的初始值为电池的初始能量,电系统正功率是放电即电系统能量减少,负值为充电即电池能量增加。限定环节主要将动力电池输出功率限制在电池的Pbmax与Pbmin范围内,Pbmax为电池的最大输出功率,Pbmin为最大再生充电功率。假定动力电池的充放电效率为恒定值ηb,BatCap为动力电池的电能容量,其大小为动力电池电压与容量C的乘积。则动力电池能量流可由下述表达式表达:


3 混合动力重型卡车控制策略简述
混合动力重型卡车的燃油经济性和排放减少效果,取决于整车各系统的工作效率和协调能力,即整车控制策略起着至关重要的作用。尽管混合动力汽车的结构各有不同,但是能量管理策略的目标都是追求最大的燃油经济性、最小的排放和最低的系统成本。同时,好的控制策略对提高整车动力性、行驶舒适性、安全性和可靠性有着积极作用。控制策略的开发主要有三种思路:基于规则的控制策略、基于模糊逻辑的控制策略、结合循环模式识别的最优工作点能量管理策略。
3.1 基于规则的控制策略
基于规则的能量管理是最常用的管理策略,在混合动力早期发展阶段使用广泛。其数学模数相对简单,适合大部分中小型车辆,基本规则包括:
1)在低功率需求和汽车速度小的情况下,仅使用电动机;
2)高功率需求时,电动机和发动机都使用;
3)汽车高速行驶或稳定速度行驶时,仅使用发动机;
4)发动机是用于驱动车辆行驶还是用于带动电动机给电池充电,取决于电池SOC状态:SOC低则充电;SOC高则不需要对电池充电;
5)最大程度地利用再生制动能量;
6)调整电动机的输出功率,优化整车动力系统效率:①适当地选用电动机,使发动机的工作点在一个更高效率的区间;②电动机的速度在最优区间时,选择给电池充电;③保持电池SOC在0.5~0.7的范围,这样可以获得充、放电的最大效率和良好的电池寿命;④汽车需求功率低时,给电池充电。
3.2 基于模糊逻辑的控制策略
由于重型卡车运行工况的复杂性,基于准确数学模型的传统设计方法是有局限性的,运用模糊逻辑方法来设计能量管理策略相对具有优势。基于模糊逻辑的混合动力整车能量管理策略可以按三个步骤进行设计:①建立模糊规则;②根据模糊if-then规则,用公式表示模糊关系;③用模糊关系进行推理,即控制电动机和发动机提供整车需要的动力。
首先,运用模糊逻辑运算,根据整车速度、需求功率以及电池系统的SOC状态,计算电动机的需求功率。然后,提供计算出的功率给最终决定模块,确定电动机和发动机分别需要输出的功率。最终,决定模块通过模糊逻辑调整电动机功率使得发动机在预定的工作点运行。
3.3 结合循环模式识别的最优工作点能量管理策略
上述整车控制策略主要缺点是决策的根据只有车辆当前工作条件,而没有考虑循环行驶和驾驶员的驾驶风格,所以无法在较长的工作时段保证最优性能。而结合循环模式识别的最优工作点能量管理策略,则结合了循环行驶和驾驶风格的识别算法,根据车辆当前速度、需求转矩、电池系统工作条件、行驶环境条件和由模式识别算法输出的未来行驶功率概况,运用动态规划优化算法对发动机和电动机进行最优功率分配。即根据车辆功率概况使给定成本函数最小化的优化原则,确定预测范围内每个时间点发动机和电动机准确的控制功率。
由于各细分市场重型卡车运行工况的复杂性,随着算法的不断优化和关键技术的突破,结合循环模式识别的最优工作点能量管理策略将是混合动力重型卡车控制策略的优先选择。
[1] 彼得·霍夫曼著,耿毅,耿彤译.混合动力汽车技术.[M]机械工业出版社.
[2] 约翰M·米勒著,刘玉梅等.混合动力汽车驱动系统.[M]机械工业出版社.
[3] Wei Liu著,殷国栋等译.混合动力汽车系统建模与控制.[M]机械工业出版社.
Configuration Scheme and Control Strategy of Hybrid Heavy Truck
Zhang Wenbo, Yang Zhigang, Yan Qiang
( Shaanxi Heavy Duty Automobile Co. Ltd., Shaanxi Xi'an 710200 )
In recent years, HEV has become a research hotspot in the automotive industry at home and abroad due to its advantages of low fuel consumption, low emission, long endurance mileage and relatively low production cost. It is predicted that the R&D of heavy truck industry in China will also develop rapidly. As a representative new energy vehicle, this paper discusses the configuration scheme, computational model and control strategy of hybrid heavy truck, and puts forward some development ideas suitable for hybrid heavy truck.
Hybrid; Configuration Scheme; Computational model; Control Strategy
A
1671-7988(2018)18-36-04
U469.7
A
1671-7988(2018)18-36-04
CLC NO.: U469.7
张文博,就职于陕西重型汽车有限公司汽车工程研究院。
10.16638/j.cnki.1671-7988.2018.18.014