微电网飞轮储能阵列协调控制策略研究
2018-09-21金辰晖姜新建戴兴建
金辰晖,姜新建,戴兴建
微电网飞轮储能阵列协调控制策略研究
金辰晖1,姜新建1,戴兴建2
(1清华大学电机工程与应用电子技术系,北京 100084;2清华大学工程物理系,北京 100084)
本文研究了并联到同一直流母线的飞轮储能阵列协调控制策略,对经典的3种功率控制策略下的荷电状态(SOC)变化率进行了推导和分析,提出改进系数的下垂控制策略,同时针对微网电压低、阻抗小引起的静态误差控制问题,采取引入虚拟阻抗的改进系数下垂控制策略进行补偿,从而改善了系统功率分配精度。最后建立了含风电场的微电网模型,仿真验证上述控制策略的有效性。
飞轮储能阵列;荷电状态(SOC);微电网;协调控制;下垂控制
与传统的大电网不同,微电网惯性小,其抗干扰能力弱;另外,微电网中接入了大量的可再生能源,如风力发电、光伏发电等,新能源特有的间歇性和随机性特点使得微电网的电压和频率稳定问题更加突出。而储能系统动态性能好、效率高,能够快速提供电网需要的有功及无功功率,因此,储能已成为微电网中提高其稳定性、安全性和电能质量的关键技术支撑[1]。飞轮储能系统具有寿命长、动态响应快、无污染等优势,是适用于微电网的一种储能技术。由于受技术和材料限制,飞轮储能的单体容量有限,因此,更大容量的飞轮储能系统由多个飞轮储能单体组成飞轮阵列[2]。目前,应用于交流微电网的飞轮储能阵列拓扑主要有两种:一是并联到直流母线,即多个飞轮单体通过AC/DC变 流器并联到直流母线后,通过一个DC/AC变流 器连接到交流母线;二是并联到交流母线,即各 个飞轮单体通过AC/DC-DC/AC变流器并联到交流 母线。
并联到直流母线的飞轮阵列协调控制方式相对简单,文献[3]研究了并联到直流母线的飞轮阵列常用的功率控制策略:等功率、等转矩、等放电时间,并进行了仿真验证;对于多飞轮的优化控制,文 献[4-6]以尽量减少损耗为控制目标分配功率:文 献[4]采用尽量少飞轮单元在线运行;文献[5]提出了飞轮并联到直流母线后通过一个逆变器并联到交流电网的控制策略;文献[6]按照等增量速度原则分配功率指令。
并联到交流母线的飞轮阵列协调控制方式相对复杂,需要考虑各个变流器的协调控制。交流微电网一般有并网和孤岛两种工作模式;并网模式下,由于有大电网的支撑,储能系统通常作为PQ节点,控制策略较为简单;孤岛模式下,有通信线的控制方式包括主从、集中、3 C控制等,无通信线的控制方式主要为下垂控制[7-8]。对下垂控制的研究主要有以下方面:包括有功和无功功率及输出电压频率和幅值之间的耦合导致的功率分配不准问题、传统下垂控制次静态误差问题、下垂控制响应慢以及多目标控制要求时下垂控制的改进等。这些研究主要集中于可再生能源与单个储能单元的并联协调控制,而较少研究多个储能单元并联的协调控制及功率分配问题[9-12]。
本文第一节给出了飞轮储能阵列的拓扑;第二节对飞轮单体的充放电控制策略进行了研究;第三节研究了并联到同一直流母线的飞轮的协调控制策略,推导了并联到同一直流母线各个飞轮的剩余发电量(相当于电池荷电状态值,下文简称SOC)变化率与SOC值的函数关系,并进行了仿真验证;第四节研究了并联到同一交流母线的飞轮储能单元的协调控制策略,考虑到微电网特性,采用了包含虚拟阻抗的改进系数下垂控制策略,并进行仿真验证;第五节建立了风储微网模型,仿真验证飞轮阵列在风储孤网中交流母线电压幅值和频率稳定。
1 飞轮储能阵列拓扑
为了进一步提高飞轮储能阵列的功率及储能量,个飞轮单体通过AC/DC变流器并联到直流母线,构成一个直流飞轮储能阵列,个这样的直流飞轮储能阵列通过DC/AC变流器并联到交流母线,拓扑如下图所示。系统中包含了(+1)×个AC/DC双向变流器,故各个变流器单元之间的协调控制十分重要。
飞轮储能单体包括飞轮、轴承、电动/发电机、变流器以及辅助系统。飞轮电机采用永磁同步电机,实现电动和发电功能;双向变流器(即可逆AC/DC)采用双闭环控制策略,即电动时速度-电流环和发电时电压-电流环。

图1 飞轮阵列储能系统
2 直流并联飞轮储能阵列放电控制
2.1 直流并联飞轮储能阵列的放电控制策略分析
对于并联到同一直流母线的飞轮单体,根据需求不同,常见的3种放电策略为:等功率控制策略、基于等转矩的功率控制策略和等时间长度的功率控制策略。从所需要的放电时间角度考虑,等功率控制策略最少;从控制策略的复杂程度考虑,基于等转矩的功率控制策略相对简单可靠[14]。
同时,飞轮阵列放电控制目标是实现飞轮本体的SOC趋向一致,也就是SOC值大的飞轮单体,其SOC变化率大,以便提高飞轮单体的利用率和效率,也避免出现有些飞轮单体转速过高或过低的问题:飞轮转速过高,则损耗加大,长期使用影响飞轮寿命;转速过低,退出发电状态,导致飞轮阵列的出力减小。为此,对文献[14]中的3种控制策略下SOC变化率进行研究。
一是等功率控制策略下SOC值变化率,等功率控制策略下飞轮的能量变化过程为

推得其SOC值变化率为
二是等时间长度的功率控制策略SOC值变化率,等时间功率控制策略下的飞轮能量变化过程为

推得SOC值变化率


三是基于等转矩的功率控制策略SOC值变化率,基于等转矩的功率控制策略下飞轮的能量变化过程为

推得SOC值变化率为

进一步积分推导得到SOC值关于时间的函数
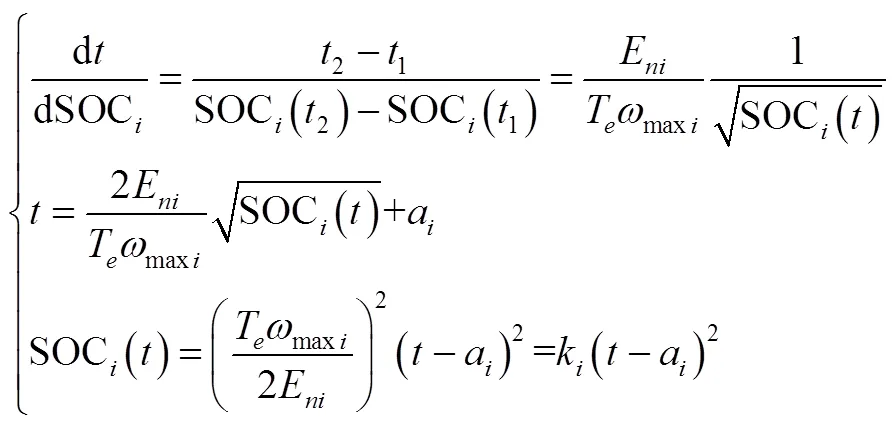
求导得到最终SOC值变化率表达式
2.2 基于等转矩的功率控制策略的仿真
以基于等转矩的功率控制策略为例进行仿真验证,仿真结果如图2所示,其中,飞轮额定转速为3600 r/min、转动惯量为205 kg·m2,系统采用三相永磁同步电机。


图2 等转矩控制策略仿真结果
3 交流并联飞轮储能阵列协调控制策略
3.1 传统的下垂控制策略
上文讨论的是并联到同一直流母线的飞轮储能阵列控制策略,但对于并联到微电网交流母线的多个直流飞轮储能阵列构成的交流并联飞轮储能阵列,其协调控制策略一般采取下垂控制策略,控制方程见式(9)[7]

下垂控制自动根据系数分配有功及无功功率。在负载或者风电场功率发生变化时,各个飞轮储能单元将迅速共同承担所需的有功及无功功率,并可以维持微网交流母线电压的幅值和频率的稳定;其缺点是功率分配无法灵活改变,并且电压的幅值和频率存在一定静态误差。
3.2 提出改进系数的下垂控制策略
对此,提出对下垂系数进行改进的控制策略,改进后各个单元下垂斜率计算方式为

此时功率分配比例为
(11)
由此可知,储存能量更多的单元,其SOC大,下垂系数小,对应的储能单元将发出更大的功率,而储存能量少的单元会发出更小的功率。
3.3 引入虚拟电抗的改进系数下垂控制策略
在实际的微网中,由于电压较低,一般输电线路为阻感性,使得下垂控制产生静态误差,需要进行补偿[15]。
故引入纯感性的虚拟电抗对改进系数下垂控制策略进行补偿,其控制框图如图3所示。

图3 引入虚拟阻抗的改进系数下垂控制
3.4 仿真验证
根据上述控制策略进行仿真研究,两个SOC状态不同的飞轮储能单元构成飞轮储能阵列,负载在2 s时增加200 kW、50 kvar,在3 s时增加200 kW,仿真结果如图4所示。
从图中可知,改进下垂控制策略能够迅速自动分配功率,响应负载功率的变化;同时保证交流母线电压的幅值及频率稳定;下垂控制调节频率存在静态误差,但误差在允许范围内;并且,两个飞轮储能单元的SOC值大的下降更快,SOC趋向于一致。


4 飞轮储能阵列应用于孤岛状态下的微电网
4.1 微电网结构
图5为风-储孤网系统结构图,系统主要由飞轮阵列、风电机组(DFIG)、备用电源及负载等组成,各单元交流侧连接在公共交流母线上。
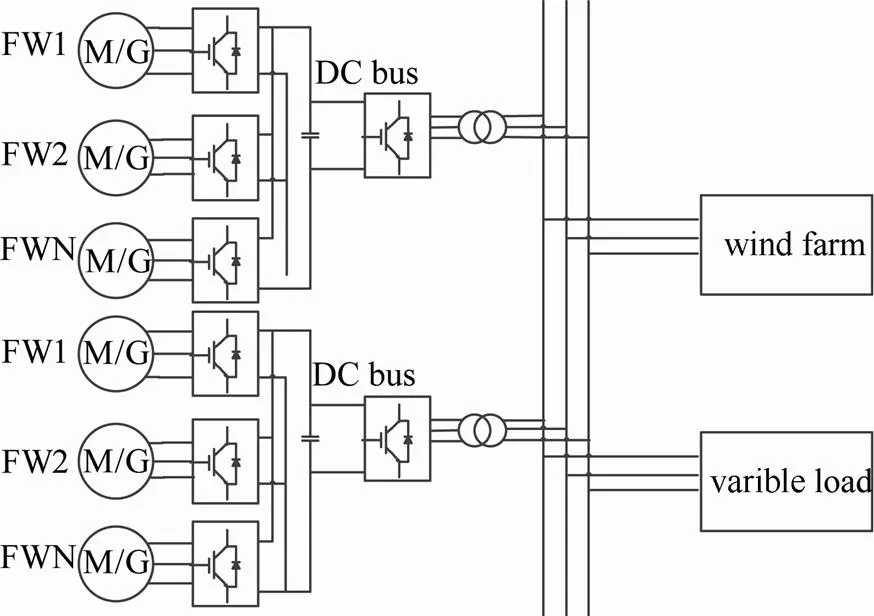
图5 微网结构
其中风力发电机组[16]包括风轮机和发电机两部分,电机采取双馈发电机,发电机定子侧直接接入交流电网,转子侧与电网间为交直交变流器。风电机组的参数见表1。

表1 风电机组参数
4.2 飞轮阵列应用于孤岛状态微电网的仿真结果
基于图5所示的孤岛状态下微电网结构,进行仿真研究,仿真结果如图6所示。
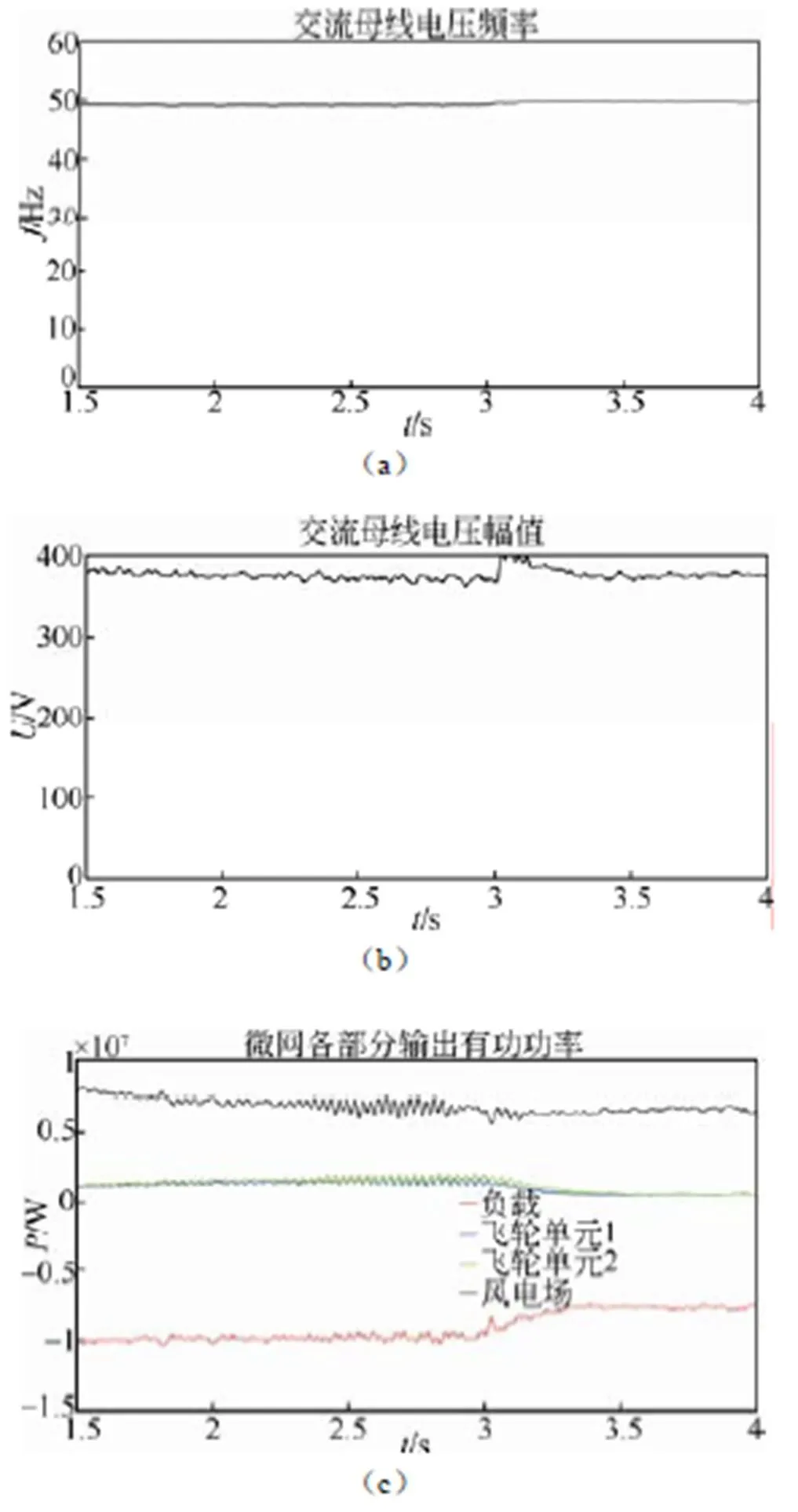
图6 微网仿真结果
根据仿真结果可知,飞轮储能阵列改进系数下垂控制策略能够实现微电网内功率的平衡,以及交流母线电压和频率稳定,适用于风储微网孤岛状态下的运行,证实了提出的上述控制策略的可行性。
5 结 论
本文主要讨论了飞轮储能阵列的协调控制方法。对于并联到同一直流母线的飞轮的3种常见控制策略的SOC值变化率做了推导,包括等功率、等转矩及等放电时间策略,等功率控制策略的SOC变化率与SOC值无关,等转矩和等放电时间控制策略SOC值大的单元变化率更高、放电更快。考虑等放电时间策略进行功率分配时需要采样转速,最终选择等转矩控制策略。对于并联到同一交流母线的多个直流飞轮阵列组成的交流飞轮阵列,提出改进系数的下垂控制策略,根据SOC的比例分配功率;同时考虑到微网输电线电压低且阻抗小的特点,进一步采取引入虚拟阻抗的改进系数下垂控制策略。建立了含风电机组的微电网模型,仿真结果验证了上述控制策略能够应用于孤岛状态下的微电网,并具有较好的控制效果。
[1] LASSETER R, AKHIL A, MARNAY C, et al. Integration of distributed energy resources. The CERTS microgrid concept[J]. Office of Scientific & Technical Information Technical Reports, 2002: doi: 10.2172/799644.
[2] AWADALLAH M A, VENKATESH B. Energy storage in flywheels: An overview[J]. Canadian Journal of Electrical & Computer Engineering, 2015, 38(2): 183-193.
[3] LIU W, TANG X, ZHOU L, et al. Research on discharge control strategies for FESS array based on DC parallel connection[C]//Power and Energy Engineering Conference. IEEE, 2012: 1-5.
[4] 黄宇淇, 姜新建, 邱阿瑞, 等. 飞轮并联运行于放电模式时的控制策略[J]. 微电机, 2008, 41(5): 20-23.
HUANG Yuqi, JIANG Xinjian, QIU A’rui. Discharge control schemes for flywheels in paralled configuration[J]. Micromotors, 2008, 41(5): 20-23.
[5] 王磊, 杜晓强, 宋永端. 用于风电场的飞轮储能矩阵系统协调控制[J]. 电网技术, 2013, 37(12): 3406-3412.
WANG Lei, DU Xiaoqiang, SONG Yongduan. Coordinated control of flywheel energy storage matrix system for wind farm[J]. Power System Technology, 2013, 37(12): 3406-3412.
[6] ZHOU L, TANG X, QI Z. Control method for flywheel array energy storage system in energy harvesting from electric railway[C]// Transportation Electrification Asia-Pacific. IEEE, 2014: 1-5.
[7] COELHO E A, CORTIZO P C, GARCIA P F. Small-signal stability for parallel-connected inverters in stand-alone AC supply systems[J]. IEEE Transactions on Industry Applications, 2002, 38(2): 533-542.
[8] GUERRERO J M, VICUNA L G, MATAS J, et al. A wireless controller to enhance dynamic performance of parallel inverters in distributed generation systems[J]. IEEE Transactions on Power Electronics, 2004, 19(5): 1205-1213.
[9] LOPES J A, MOREIRA C L, MADUREIRA A G. Defining control strategies for microgrids islanded operation[J]. IEEE Transactions on Power Systems, 2006, 21(2): 916-924.
[10] LI Y, LI Y W. Power management of inverter interfaced autonomous microgrid based on virtual frequency-voltage frame[J]. IEEE Transactions on Smart Grid, 2011, 2(1): 30-40.
[11] KIM J Y, JEON J H, KIM S K, et al. Cooperative control strategy of energy storage system and microsources for stabilizing the microgrid during islanded operation[J]. IEEE Transactions on Power Electronics, 2010, 25(12): 3037-3048.
[12] BIDRAM A, DAVOUDI A. Hierarchical structure of microgrids control system[J]. IEEE Transactions on Smart Grid, 2012, 3(4): 1963-1976.
[13] 徐佳园. 永磁同步电机最大转矩电流比控制[D]. 北京: 北京交通大学, 2010.
XU J Y. The maximum torque per ampere control of permanent magnet synchronous motor[D]. Beijing: Beijing Jiaotong University, 2010.
[14] 唐西胜, 刘文军, 周龙, 等. 飞轮阵列储能系统的研究[J]. 储能科学与技术, 2013(3): 208-221.
TANG Xisheng, LIU Wenjun, ZHOU Long, et al. Flywheel array energy storage system[J]. Energy Storage Science and Technology, 2013(3): 208-221.
[15] 彭思敏. 电池储能系统及其在风—储孤网中的运行与控制[D]. 上海: 上海交通大学, 2013.
PENG S M. Battery energy storage system and its operation and control in wind storage network[D]. Shanghai: Shanghai Jiaotong University, 2013.
[16] MILLER N W, SANCHEZ-GASCA J J, PRICE W W, et al. Dynamic modeling of GE 1.5 and 3.6 MW wind turbine-generators for stability simulations[C]//Power Engineering Society General Meeting. IEEE, 2004: 1977-1983.
Coordinated control strategy of flywheel energy storage array for micro-grid
JIN Chenhui1, JIANG Xinjian1, DAI Xingjian2
(1Department of Electrical Engineering, Tsinghua University, Beijing 100084, China;2Department of Engineering Physics, Tsinghua University, Beijing 100084, China)
The coordinated control strategy of flywheel energy storage array from parallel to the same DC bus is studied in this paper. The change rate of charge state (SOC) under three classical power control strategies is deduced and analyzed. An improved coefficient droop control strategy is put forward. The virtual impedance of improved coefficient droop control strategy is adopted to improve the accuracy of power allocation to solve the static error control problem caused by low voltage of micro-grid. Finally, a micro-grid model with wind farm is established, and the effectiveness of the above control strategy is verified by simulation.
flywheel energy storage array; state of charge; micro-grid; coordinated control strategy; droop control strategy
10.12028/j.issn.2095-4239.2018.0115
TQ 028.8
A
2095-4239(2018)05-834-07
2018-07-10;
2018-08-13。
国家重点研发计划项目(2018YFB0905500)。
金辰晖(1993—),女,硕士研究生,主要研究方向为飞轮储能技术,E-mail:jinchenhui1024@163.com。
