非线性随机参数对双渐开线齿轮的影响分析
2018-09-20方志远张秀文
□ 方志远 □ 张秀文
青岛科技大学机电工程学院 山东青岛 266061
1 研究背景
齿轮传动广泛应用于机械、汽车、航空航天及机器人等领域中,是一个复杂的非线性系统[1-2]。由于齿轮时变啮合刚度和传动中间隙的存在及其它因素,会导致齿轮系统产生复杂的动力学行为,其中包括准周期振动、混沌振动等[3-4],这些振动往往伴随无规律的随机振动。在齿轮加工过程中,由于环境、人为因素,每个齿轮的结构尺寸并不完全相同,从而导致在实际传动过程中对运行结果产生影响[5]。因此,对于随机参数对齿轮影响的研究是非常有必要的。
在很长一段时间内,国内外学者对随机非线性系统进行了很多理论分析和试验研究。WANG等[6]对非白噪声误差激励下的齿轮传动系统建模问题进行了深入讨论。卢剑伟等[7]利用分岔图及最大李雅普诺夫指数等,对考虑随机装配侧隙的齿轮副系统动力学性能进行了分析。陈会涛等[5]建立了单对齿轮系统纯扭转非线性动力学模型,分析了齿轮综合传递误差波动和外部载荷对系统振幅和动态啮合力的影响。Velex等[8]对非线性随机参数系统的振动可靠度进行了计算。陈思雨等[9]研究了轮齿随机间隙对齿轮系统动力学响应的影响。刘梦军等[10]研究了分析系统非线性随机动力特性及全局初值特性的方法。
分阶式双渐开线齿轮是综合了渐开线齿轮和双圆弧齿轮优点的一种新型齿轮[11],其与普通渐开线齿轮最大的区别在于工作齿廓由两段相错的渐开线组成,中间以一段圆弧包络线或一段过渡曲线连接,齿顶与齿根两段渐开线齿廓呈阶梯式布置,而普通渐开线齿轮的工作齿廓仅由圆弧构成。
笔者建立基于双渐开线齿轮传动系统的扭转振动力学模型,讨论在随机振动情况下啮合阻尼比对双渐开线齿轮扰动及系统动力学的影响。
2 双渐开线齿轮振动模型
建立双渐开线齿轮振动模型,需要根据齿轮的不同情况,综合考虑啮合刚度、输入力矩、阻尼比、齿侧间隙、激励频率等多种因素的随机扰动。建模时不考虑齿面摩擦的情况,采用集中质量法。将双渐开线齿轮振动模型简化为齿轮副扭转振动力学模型,如图1所示。
图1中,双渐开线齿轮主动轮P和从动轮G的基圆半径分别为Rp、Rg,将传动轴、轴承和箱体等的支承刚度和阻尼系数分别用组合等效值 kpy、kgy、cpy、cgy来表示。mp和mg分别为主从动轮的质量,Ip和 Ig分别为主从动轮的转动惯量,ωp和 ωg分别为主从动轮的激励频率,e为齿轮啮合综合误差,km和cm分别为齿轮副啮合的综合刚度系数和综合阻尼系数。
齿轮的静态传递误差e(t)是客观存在且随时间变化的周期函数,以啮合频率为基准对e(t)进行傅里叶级数展开:

式中:ωh为无量纲激励频率。
考虑到由e(t)引起的高频内部激励和由输入扭矩波动引起的低频外激励,忽略输出扭矩的波动,于是有:

式中:Tp为输入扭矩;Tpm为输入扭矩的平均值;Tpn(t)为输入扭矩的变化值;Tg为输出扭矩;Tgm为输出扭矩的平均值。
双渐开线齿轮振动模型具有4个自由度,分别为主从动轮绕旋转中心的转动自由度和沿Y轴方向的平移自由度,4 个自由度的振动位移分别为 θp、θg、yp、yg,速度分别为加速度分别为
根据推导,可以得到系统的分析表达式为:
式中:mp、mg、Ip、Ig分别为主从动轮的质量和转动惯量;cpy和cgy分别为主从动轮的平移振动阻尼系数;kpy和kgy分别为主从动轮的平移振动刚度系数;βb为双渐开线齿轮的螺旋角;Fg和Fg分别为主从动轮受到的外力。
根据式(4)~式(7),可以推导出:
对式(8)~式(11)进行无量纲化处理,令 x1=yp,x2=为齿轮传动的相对扭转位移,为齿轮传动的相对扭转速度,得到状态方程:
式中:Fb1和Fb2分别为主从动轮轴上轴承对齿轮的无量纲作用力;k1和k2分别为主从动轮的无量纲啮合刚度;c1Δ、c2Δ、c3Δ和 c4Δ分别为无量纲阻尼比的随机扰动系数;c为无量纲阻尼比;Fah为齿轮综合啮合刚度误差;FΔ为无量纲输入力矩的随机扰动量;ωΔ为无量纲激励频率的随机扰动因数;Fm为无量纲切向平均作用力;kp(t)和 ky(t)分别为主从动轮啮合刚度随时间变化的函数;kpy(t)为主从动轮耦合后随时间变化的函数;fh(x5)为齿轮啮合非线性函数。
3 非线性动力学特性分析
不同的参数变量变化使系统的运动特性变化不同,所以在不同的参数情况下,系统会有不同的响应。当双渐开线齿轮受到外界扰动时,系统响应特性会随之发生变化。为了确定啮合阻尼比作为随机扰动因素对系统动力学性能的影响,首先不加入随机扰动,分析动力学性能,然后加入随机扰动,并与无随机扰动的系统进行对比,从而得到不同随机扰动情况下的系统啮合阻尼规律。选用变步长的龙格-库塔法对系统动力微分方程逐步积分,选取系统的无量纲参数如下:Fah=0.05,ωh=0.34,Fm=0.01,Fb1=0.2,Fb2=0.2,FΔ=0,k1=1.5,k2=1.5,ωΔ=0。取初始状态 x1(0)=0,x2(0)=0,x3(0)=0,x4(0)=0,x5(0)=0,x6(0)=0,在随机状态下以啮合阻尼为分岔参数,取c=0.18并依次减小啮合阻尼的大小,令c1Δ=0.012,c2Δ=0.012,c3Δ=0.012,c4Δ=0.012。
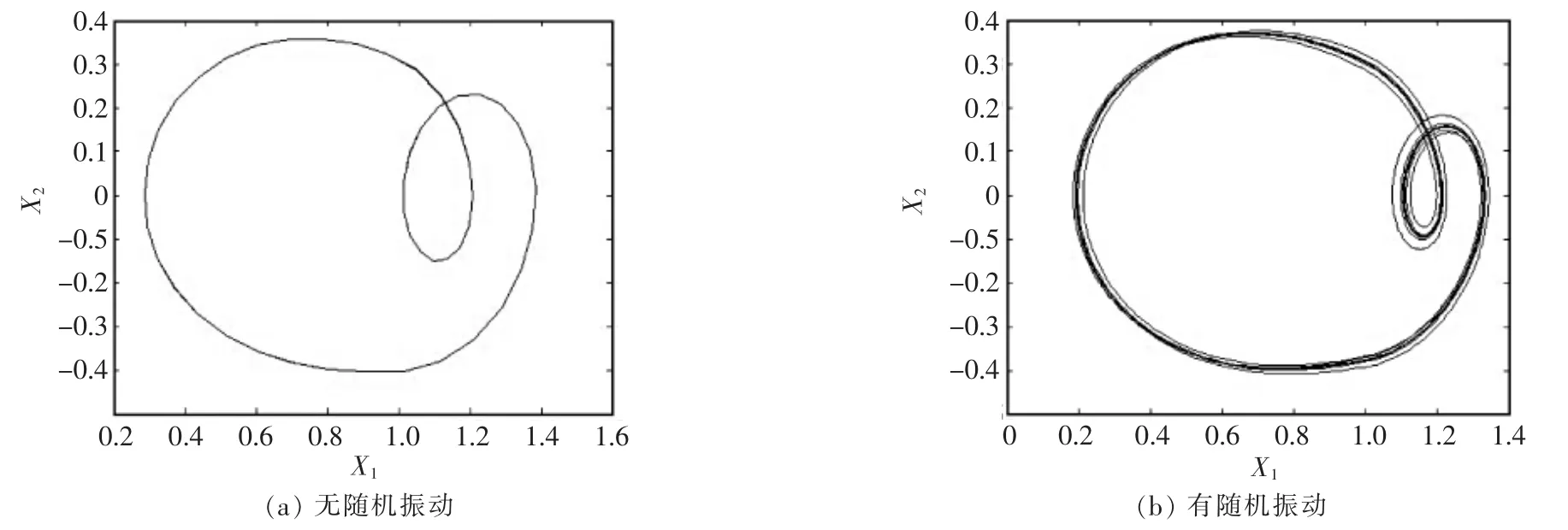
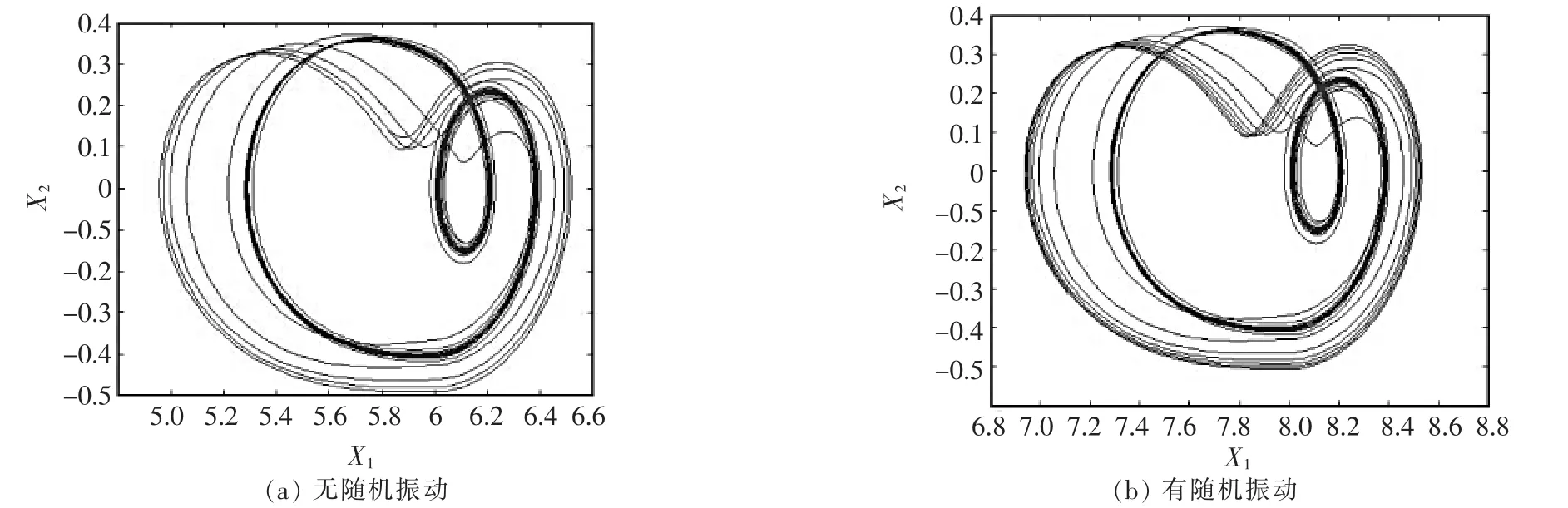
将所取数值代入式(12),利用四阶龙格-库塔法进行数值分析仿真,从而得到无随机扰动和有随机扰动两种不同情况的系统动态响应,如图2~图5所示,图中X1为无量纲位移,X2为无量纲速度。
由图2~图5可以看出,当c=0.18时,动态响应为近似椭圆形状,随机振动对系统动态响应的影响微乎其微;当c=0.14时,动态响应为非圆闭合曲线,无随机振动的动态响应为一条光滑的闭合曲线,而有随机振动的动态响应出现多条缠绕的曲线,此时可以明显看出随机振动对系统动态响应的影响;当c=0.07时,动态响应与c=0.14时基本保持相同,但是缠绕的曲线增多,且有随机振动的动态响应曲线明显增多,说明随机振动对系统动态响应产生影响。当c=0.058 5时,动态响应的图像为封闭曲线,变化趋于混乱,幅值明显增大,且有随机振动的动态响应变化幅度相对明显。
4 结束语
▲图2 c=0.18时系统动态响应
▲图3 c=0.14时系统动态响应
▲图4 c=0.07时系统动态响应
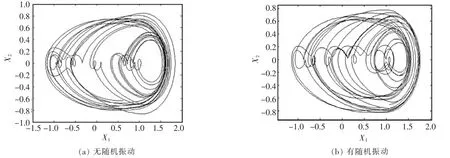
▲图5 c=0.058 5时系统动态响应
建立双渐开线齿轮振动模型,对其非线性动力学进行分析,在确保无关参数不影响试验的情况下,加入随机振动进行分析,获得不同啮合阻尼下的动态响应,从而反映不同随机扰动情况下系统啮合阻尼的变化规律[12]。分析结果表明,随着啮合阻尼的变小,动态响应愈发趋于不规则。有随机振动的动态响应和无随机振动的动态响应变化趋势接近,有随机振动的动态响应相对变化程度较大,说明随机振动会对双渐开线齿轮传动产生不利影响。影响双渐开线齿轮传动的非线性因素有很多,实际使用过程中都是随机变化的,需要特别注意。
