基于NESO的永磁同步电机无位置传感器控制
2018-09-19南余荣姚亚楠宛冬晴
南余荣,姚亚楠,钱 宁,宛冬晴
(浙江工业大学信息工程学院,杭州 310023)
0 引言
近年来,随着电力电子技术、微电机技术、新型电机控制理论和稀土永磁材料的快速发展,PMSM得到了迅速的推广应用。相比传统励磁同步电机,PMSM具备结构简单、维护方便、低噪声、高可靠性等优点[1]。PMSM的控制系统中用到最多是矢量控制技术,矢量控制需要实时获取转子的位置和速度信息。传统的电机控制系统中,位置信息通常使用机械传感器来获得,如光电编码器、开关型霍尔传感器、旋转变压器等,但是这些传感器存在一些固有的缺陷,增加了系统成本,降低了系统的可靠性。为了克服使用传感器给系统带来的问题,无位置传感器控制技术的研究具有了重要的意义,并且成为了电机驱动控制领域的研究热点。
LiYanming针对无位置控制算法提出直接估算法,根据静止坐标系的定子电压方程得到电机反电动势,积分得到转子的磁链,然后从磁链中提取转子角度和速度。算法简单,动态响应速度快,但是受外界干扰影响,精确度低[2]。LinShuyi、祝晓辉等通过滑模观测器来实现对速度和转子位置的估算[3-5],这是一种非线性控制结构,通过使系统沿着设定的滑模面运动实现控制,将电流误差的开关函数作为反馈,设计反馈增益是系统收敛到滑模面,根据等效控制原理,电压方程中的反电动势大小等效于开关函数的值。它的优点是抗扰性能强,响应迅速,但是会带来抖振的问题。高频注入法最早由美国Lorenz等学者提出[6-7],利用电机的磁路不对称,通过向电机定子注入高频电压或电流来跟踪电机的凸极性,效果会通过包含转子位置和转速的高频载波反映在电机定子电压或电流上。高频注入法为静止和低速允许提供了解决方案[8-9],鲁棒性较好。但是实现复杂,增加了系统成本,而且高速运行时高频信号会影响电机控制性能。神经网络控制是较新的一种控制思想[1011],神经网络算法具有很强的自学习能力,通过前馈以及反馈多层网络对系统参数进行学习从而得到控制系统的参数信息,但是神经网络的函数逼近对学习数据比较敏感,而且算法复杂。
扩张状态观测器 (ESO)是根据被控对象的实际输出信号和控制输入,实时估计出对象的状态变量以及被控对象的扰动总和,可以分为线性扩张状态观测器 (LESO)和非线性扩张状态观测器 (NESO)[12-14]。NESO通过选择合理的非线性函数和相关参数,能实现对不确定系统的扩张状态有很好的跟踪性能。
本文应用无位置传感器技术和NESO理论,提出了通过一种非线性扩张状态观测器来实现PMSM的无位置传感器控制。利用NESO观测被控对象的状态和内外扰动,通过锁相环 (PLL)从反电势观测值中提取转子位置和转速信息,针对NESO的特性,采用了分段稳定性分析和构建Lyapunov函数分析,证明了观测误差系统渐近稳定。仿真结果显示,NESO能够对电机反电动势实现精确的观测,观测转速实现了对实际转速的渐近跟踪。
1 PMSM的数学模型
永磁同步电机的反电动势中包含转子位置和转速的信息,因此选择两相静止坐标系的电机模型来分析。假设电机磁场在空间呈正弦分布,磁路不饱和,不考虑铁心磁滞损耗和涡流损耗情况下,可得到PMSM在两相静止坐标系下的状态方程[15]为:
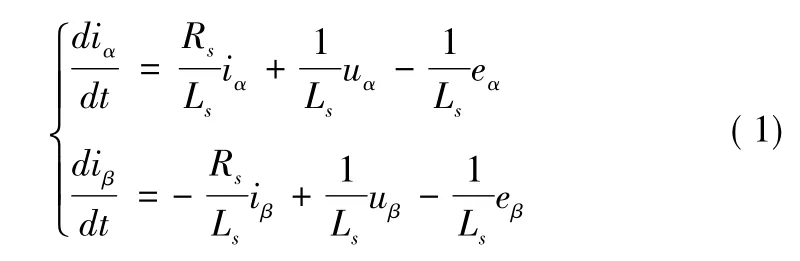
式中,

其中:uα,uβ,iα,iβ分别是定子电压和定子电流在 αβ轴上的分量;eα,eβ是反电动势在αβ轴上的分量;Ls是定子相电感;Rs是定子相电阻;ωr是转子角速度;ψf是转子磁动势;θe是转子转角。
从式 (2) 可以看出eα,eβ包含了转子转速ωr和位置θe的信息。而反电动势eα,eβ不能直接测量得到,可以作为内部扰动处理。文中研究对象为表贴式永磁同步电机,采用的是id=0控制,PMSM的无位置控制原理如图1所示。首先通过电压、电流传感器测得电机定子三相电流和电压,经过坐标变换后得到静止坐标系下的电压、电流量;然后通过NESO观测得到静止坐标系下的反电势eα,eβ,从反电动势中提取电机转子位置和转速信息,反馈到电流环和速度环;最后电流环输出dq轴给定电压,通过SVPWM调制产生六路驱动信号,输出到逆变器控制电机转动。双闭环结构采用PI控制器。

图1 PMSM无位置控制原理
2 NESO设计
2.1 NESO原理
考虑一个n阶的非线性系统y(n)=f(y,y,···,y(n-1),w(t))+bu(t),其中f(y,y,···,y(n-1),w(t))是一个不确定的非线性函数;w(t)为未知外界扰动,且w(t)有界;y(t)是可测的系统输出;u(t)是系统控制输入。可以得到系统的状态空间方程如下:

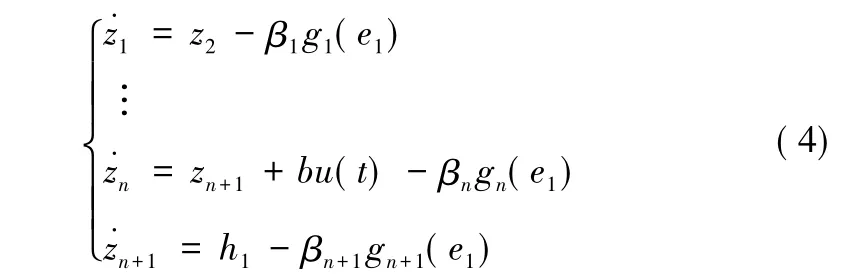
其中:zi是xi的估计值,e1=z1-x1,βi是反馈增益。令gi(e1)=ki(z1-x1),则gi(e1)为线性增益函数,本文采用的是非线性扩张状态观测器,定义反馈函数gi(·)为:
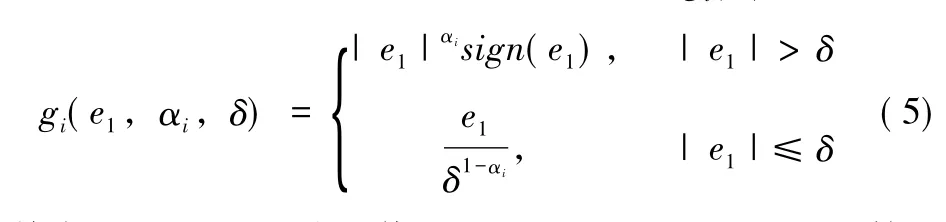
其中:δ是误差的临界值,δ∈(0,1),sign()是符号函数,αi是调节参数。当|e1|>δ,由于非线性的符号函数,观测器能够快速的收敛;当|e1|≤δ,取代符号函数能够防止高频抖振。gi(e1)能在小误差产生高增益,大误差产生小增益。
2.2 NESO设计
根据NESO的原理,将式 (1)中eα,eβ定义为一个新的状态,用w(t)表示系统的未知变量,得到系统的状态方程描述如下:


式 中, βi> 0,x1= [ iαiβ]T,x2=z,z是 x,x的估计值,A=1212根据上文状态方程 (6)构造的NESO为:
式中的w(t)的值认为是有界的,假设|w(t)|<w0,观测器的原理如图2所示。
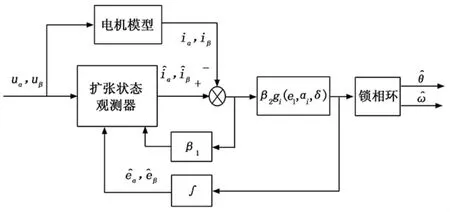
图2 NESO原理图
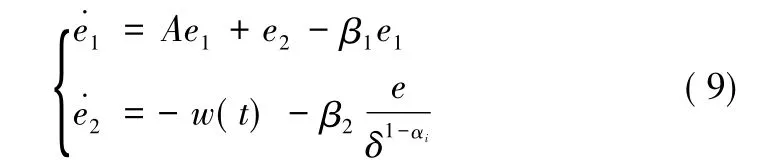
如果令e1=z1-x1,e2=z2-x2,则可以得到扩张状态观测器的误差方程:

2.3 收敛性分析
观测器的关键在于如何选择参数β1,β2,α,δ使误差系统快速收敛,由于g2(e1)的非线性,整体分析会很困难,可以分为|e1|≤δ和|e1|>δ两个区间来考虑。
当|e1|≤δ时,系统误差方程为:
此时可以作为 LESO来分析,文献[16]从时域和频域的理论角度证明LESO在干扰下的观测误差有界,给出了LESO稳定性的理论依据,研究了参数在全频域内对的观测性能的影响,分析了LESO的参数与补偿效果的之间的关系。
当|e1|>δ时,系统误差方程为:

为了更好的分析观测器的稳定性,取α=0.5。
观测器的稳定性需要证明存在一个正定能量函数,而导数总是负的。构建Lyapunov函数Ce22,其中的A,B,C是待确定的常量,选择合适的A,B,C使能量函数满足Lyapunov稳定性定理[17-18]。

为了保证V是正定的,所以需要满足:

对V求导,可以得到:

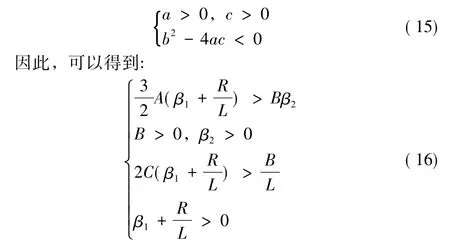
上述结果可以使V1负定,但是V的值不确定。当V=V1-V2<0,即满足V1<V2,在三维坐标系中表示函数V1在函数V2以下的部分。只要保证系统稳态误差处于这个范围,就能实现NESO的有界稳定。
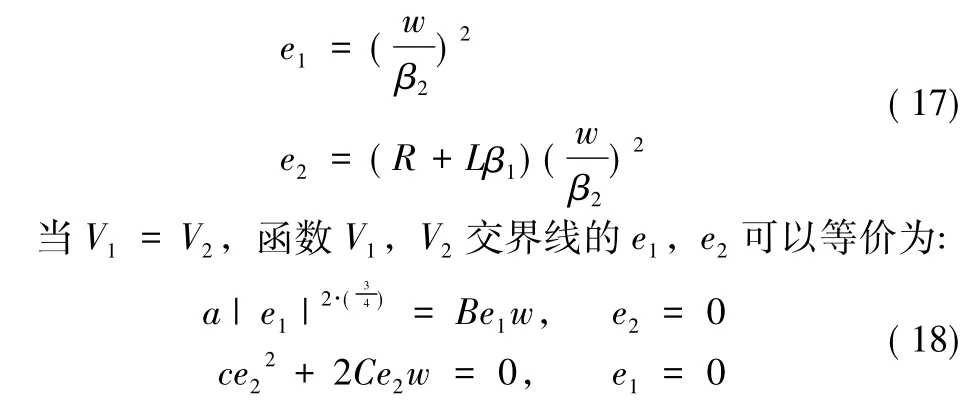
由式 (17)得到:

如果β2的数值足够大,可以降低e1的稳态误差。而且式
综合上述的推导,通过对误差系统通过分区和Lyapunov函数对NESO的稳定性进行分析,选择合适的观测器参数β1,β2能够实现观测器的有界稳定。
3 系统仿真实验
为了验证本文所设计的基于NESO无位置传感器方法的有效性,对其进行仿真验证,仿真的永磁同步电机参数如表1所示。根据观测器收敛性分析原理和电机参数,仿真实验中选择的观测器参数为β1=800,β2=1200。

表1 PMSM参数
仿真实验中,让电机空载启动,给定参考速度为700 rad/s,在t=0.05 s时,负载由0 Nm突加到3 Nm。
图3和图4可以看出在启动阶段时,观测转速对实际转速的跟踪会有延时,观测转速和实际转速会有较大的误差,0.02 s后观测转速跟踪实际转速至给定值,之后能很好的跟踪实际转速,由于观测器中的非线性函数,转速观测值和实际值之间会存在抖振,放大图显示当转速稳定后,估计转速数值在实际转速上下轻微的波动,波动范围在10 rad/s之内;0.05 s突加负载,转速出现振荡,系统能在很短时间实现调节,使观测转速基本保持不变。转子位置的准确跟踪对电机运行至关重要,图5是转子位置的跟踪响应图,同样在0.02 s之后,转子观测位置实现了对实际值的良好跟踪,很较快的响应速度。
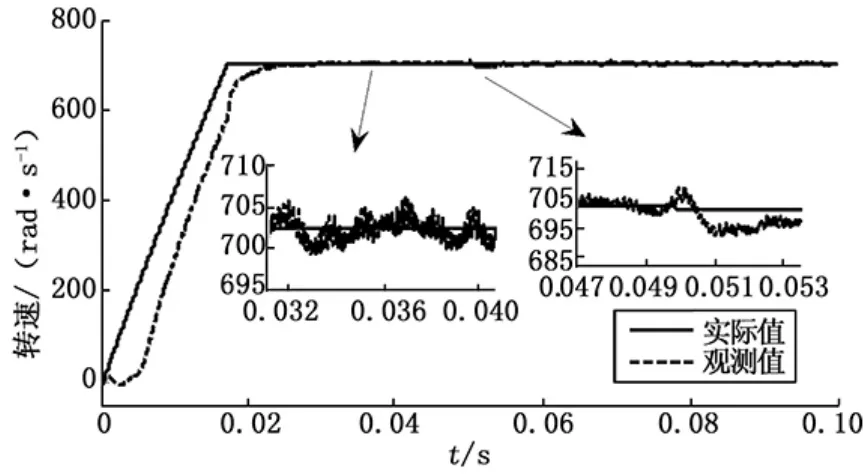
图3 转速观测值和实际值对比
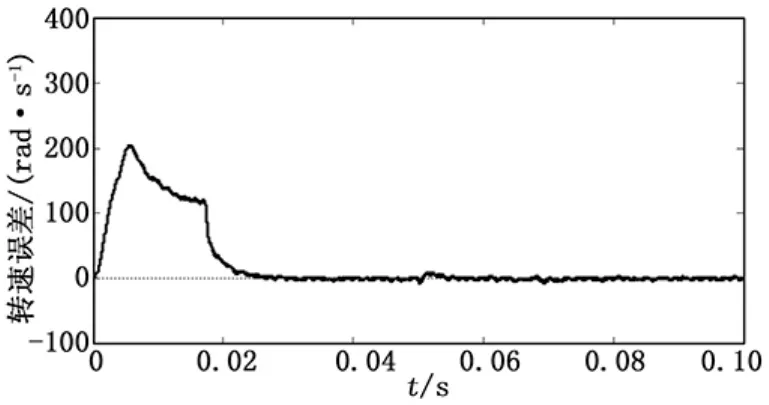
图4 转速观测值和实际值的误差

图5 转子位置观测值和实际值
观测系统的目的是得到电机转子的位置和转速,但是位置和转速的估计值都是由iα,iβ来决定的。图6是状态变量iα,iβ观测值和实际值的误差,实际值和观测值之间的误差稳定在0.3 A范围内。上文理论证明了观测器中的增益β2选择会影响误差系统的稳定性,这里选取不同β2来验证效果。图7分析了不同β2对观测值iα,iβ的影响,当β2=600时,iα,iβ观测值和实际值之间的误差大致1.4 A,而β2=1200时误差大致0.8 A。验证了在合适的范围内,对于NESO观测误差系统,较大的β2值有较小的观测误差,具有更好的抗抖振性。
PMSM的转速和位置信息都是从反电动势中提取,通过观测器得到eα,eβ如图8所示,可以看出反电动势波形光滑,观测精度较高。
4 结论
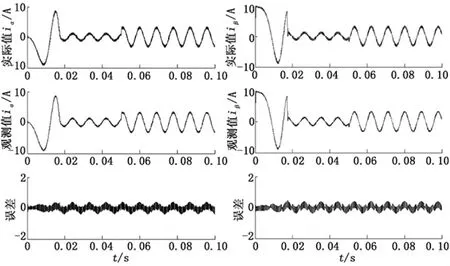
图 6 iα,iβ 实际值和观测值
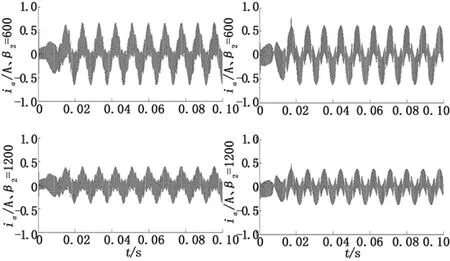
图7 β2=600,1200时电流观测误差

图8 反电动势eα,eβ观测值
本文设计了基于非线性结构的扩张状态观测器来实现永磁同步电机无位置传感器控制,通过观测带有转速和位置信息的反电动势,从而实现对电机转子速度和位置的估算。而由于非线性结构使稳定性分析变得困难,提出了一种分段分析和Lyapunov函数稳定性分析相结合的方法证明了观测器的有界收敛性。仿真实验的结果图表明,NESO有较快的实现转速的跟踪响应和很好的鲁棒性,能够运用到电机的无位置传感器控制,为电机的无位置控制提供了新的思路。