基于Solidworks的六自由度平台仿真在动感影院中的应用
2018-09-18陈明
陈明
(温州南方游乐设备工程有限公司,浙江温州,325000)
引言
六自由度平台在游乐设备领域主要用于动感影院,动感影院正处在一个从起步到发展的过渡阶段。比较常见的项目如黑暗乘骑、飞行影院、影视悬挂过山车等。
由于六自由度平台运动的复杂性,且其动作要与影片相结合才能让游客有身临其境的感受,因此,传统的二维设计方法已经不能满足新产品开发的需要。在游乐设备的开发阶段,根据影片的指定动作,通过运动仿真,可以得到设备的运动轨迹,检查其干涉情况,对游客进行视线分析和设备结构优化具有指导作用。在后期设备的调试阶段,如果直接将平台连续变化的姿态数据作为控制目标,那么控制系统将变得异常复杂。因此,有必要通过Solidworks Motion将连续变化的姿态数据转变为电动缸的位移数据。
1 六自由度平台的概述
1.1 六自由度平台的起源
六自由度运动平台,又称斯图尔特平台,是通过六个对称的直线驱动缸的协调伸缩来实现上平台沿x,y,z向的平移和绕x,y,z轴的旋转运动(共6个自由度),以及这些自由度的复合运动。运动平台在仿真运动模拟器中的主要作用是,给仿真对象中的人(游客)提供一个仿真的空间实时加速度输入信号,以再现模拟仿真对象的运动感觉。在很多的运动对象的高端仿真模拟系统中,六自由度运动系统已经成为了不可缺少的重要的分系统,例如汽车驾驶模拟、飞行仿真、坦克模拟器、火车模拟器和轨道车辆的模拟器中。
1.2 六自由度平台组成
六自由度平台的结构组成为:(1)上平台,用于承载负载;(2)驱动杆,共6根,可以由电动缸或者液压缸驱动;(3)下平台,为机构的底座;(4)铰链,可以是球铰或虎克铰,位于驱动杆两端,用于固定连接上下平台。六自由度平台通过6根驱动杆的伸缩来实现横移、纵移、升降、横滚、俯仰、偏航6个自由度的运动以及它们的组合运动。六自由度平台的模型如图1所示。

图1 六自由度平台模型
1.3 六自由度平台在游乐设备中的发展
随着我国经济的高速发展,人们的文化精神需求的提高,游乐设备正由户外单体设备向室内数字娱乐结合的大型游乐设备发展。人们已经不再满足于传统的休闲方式,而更加热衷于主动参与、亲身体验的现代娱乐方式。于是,六自由度平台开始广泛应用于游乐设备领域,并处于黄金的发展期。
在此之前,六自由度运动平台多应用于兵器、船舶、航天、航空、电子等国防工业部门和民航、石油、铁道、地震、交通等民用工业部门,在游乐设备行业应用不多。
六自由度平台在游乐设备领域主要用于动感影院,动感影院正处在一个从起步到发展的过渡阶段。近年来,越来越多的观众认识并且接受了这一高新科技娱乐项目,未来动感影院将会蓬勃发展。
六自由度平台的上侧(或下侧)会连接座舱设备,乘客在座舱中跟随着影片的情节可产生俯仰、翻滚、偏航、升降、涌进、平移等动作,从而使游客在安全舒适的体验过程中,更加真实地感受影片内容。比较常见的有上置座舱和悬挂座舱两种,如图2所示。

图2 游乐设备中六自由度平台常见的两种应用方式
1.4 六自由度平台类型的选择
六自由度平台分液压缸驱动和电动缸驱动两种。在游乐设备中,绝大部分设计都是采用电动缸驱动的六自由度平台。相比于液压运动系统,电动运动系统具有无可比拟的优越性,体现在:
(1)对厂房等技术设施的要求降低。电动平台不需要像液压系统一样复杂的基础建设,例如专门的泵房来安放液压泵站,不需要蓄水池(冷却水池)、冷却塔、蓄压器、阀和各种液压管路,而游乐设备对占地要求,地面整洁度等要求更高。
(2)安装和维护成本降低。电动运动系统由于结构简单,安装可以在2-3天内完成。电动运动平台的电机通常是在密封状态下的,在模拟器的整个使用寿命中都不需要多余的维护。相比而言,液压运动平台完全需要大量的人工支持和维护开支。
(3)安全性提高。游乐设备中,乘客的安全必须放在首位。有毒液压油的泄露,潜在的液压管路的破裂都意味着液压运动平台安装和操作过程中都比电动平台有更大的安全隐患; 可靠性提高。
(4)故障了降低。液压系统有伺服阀、油滤等易损坏部件,客户经常要被迫停止;电动运动系统的平均故障时间大大延长,更受客户的欢迎。
(5)设备性能提高。电动运动系统具有更快的反应时间,更大的加速度变化率,更短的系统延时。电动运动系统具有更好的频率响应特性,能够模拟更好的动态效果; 结合影片播放,可以让乘客有身临其境的体验。
(6)功率消耗少。设备运行时消耗的电能一般是同样载荷液压系统的25%-30%。
2 六自由度平台三维模型建立
本文以黑暗乘骑动感车(每车乘坐 8人)中所使用的六自由度平台为例进行分析。此六自由度平台最大有效静载荷为 2000kg,电动缸的行程为320mm。下平台与车辆底盘连接,其电动缸铰链座分布圆直径为φ2080mm,长边为1680mm,短边为220mm。上平台与车辆座舱连接,其电动缸铰链座分布圆直径为φ1700mm,长边为1350mm,短边为220mm。当六自由度平台处于低位时,上下铰链座中心距为 890mm。基于以上结构尺寸,利用SolidWorks对六自由度平台进行三维实体建模。
2.1 零部件建模
根据平台各零部件的外形尺寸,采用自下而上的设计方法,利用拉伸、旋转、扫描等特征功能,建立各零部件的模型。在建模过程中,通过合理地设定各零部件之间的父子关系,以尽量减少零部件上的定位尺寸,提高设计效率。为了能够进行运动仿真,电动缸体和电动缸杆应分成两个零件。对于具体建模步骤本文不作详细介绍。
2.2 零部件装配
零部件建模完成后,根据平台的尺寸范围和各零部件之间的约束关系进行平台的装配。在整个六自由度平台的装配中,下平台设为固定,有相对运动的部件应求解为柔性。具体操作中,应该按照平台的运动特点选择合适的约束类型和连接形式进行零部件装配,这对能否成功地实现运动仿真至关重要。
2.3 模型干涉检查
零部件装配完成后,通过配合中只用于定位功能,将上平台调整到初始低位状态。对模型进行干涉检查,确定各零部件间没有干涉后平台模型即建成。
3 六自由度平台运动仿真分析
当六自由度平台的Solidworks三维模型建立完成后,直接进入运动算例,利用SolidWorks Motion进行仿真,这能更好的保证仿真中数据的兼容性和完整性。SolidWorks Motion依托其强大的运动分析功能,能精确地对六自由度平台进行运动位置及运动参数的计算、动力学分析,并以动画和图表的形式演示出来。
此六自由度平台的仿真采用逆向的仿真分析,即在上平台施加运动驱动,然后反解出各个电动缸的运动情况。
3.1 绘制驱动样条曲线
在六自由度平台模型初始低位状态下,对此六自由度平台做螺旋运动为例进行分析。设定其上平台的驱动样条曲线为半径R=150mm,螺距P=100mm,圈数n=3,绘制出上平台驱动样条螺旋线。绘制出螺旋线后,将其转变为3D草图,将此3D草图与上平台上对应的点采用路径配合,此路径配合将在运动仿真中作为驱动路径。如图3所示。
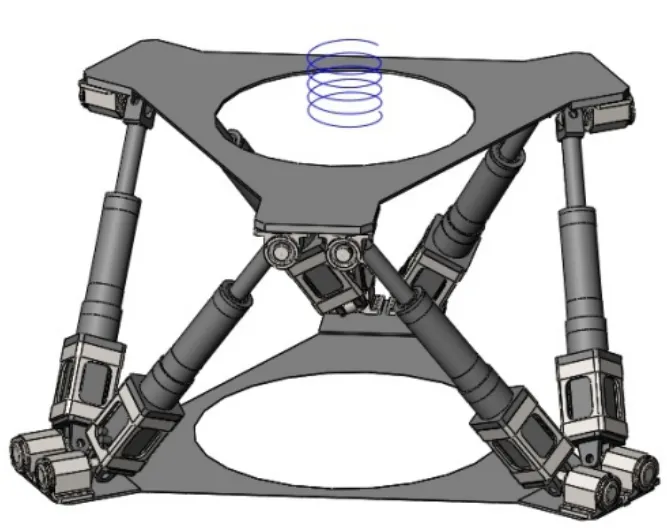
图3 驱动样条曲线

图4 添加马达
3.2 创建平台运动算例
六自由度平台的虚拟样机模型建立完成后,即可创建运动算例,利用SolidWorks Motion进行仿真。创建运动算例,选择Motion分析,为上述驱动路径添加路径配合马达,运动类型中选择等速,v=200mm/s,如图4所示。拖动时间键码到12s位置,选择计算后模型开始运行仿真。
3.3 分析平台运动仿真结果
仿真结束后单击“结果和图解”,查看每只电动缸缸杆的伸缩量和各自由度变化量,结果如图6、图7所示。

图6 电动缸杆伸缩量

图5 各自由度变化量
此外,在六自由度平台上添加一个力来模拟座舱及游客的重量,加上实际的驱动样条曲线,通过仿真分析,可以得到每只电动缸实时变化的马达力、能量消耗等参数。运动仿真还可以准确地进行游客视线分析,这对整体项目的布局,球幕的尺寸选择等具有重要的指导意义。
4 六自由度平台的数据输入及控制方法
在游乐设备中,六自由度平台结合影片进行多自由度动作,再配合声音、吹风、气味等特效,可以给游客带来一种身临其境的全新体验,也是未来游乐设备的发展趋势。现以上述的黑暗乘骑项目六自由度平台数据的输入及控制方法进行实例介绍。
4.1 通过Maya软件生成六自由度平台的姿态数据
黑暗乘骑的影片由Maya完成,座椅要配合影片进行动作,也就是说六自由度平台的动作文件是由影片决定的。在Maya中,影片技术人员生成相机视角曲线,导出连续变化的姿态数据。
4.2 将连续变化的姿态数据转变为各电动缸连续变化的位移数据
上述导出的姿态数据是连续变化的空间六自由度数据:X 坐标,Y 坐标,Z 坐标,X 轴旋转,Y 轴旋转,Z 轴旋转。但是六自由度平台如果以连续变化的姿态数据作为控制目标,那么控制系统将变得异常复杂,控制不但要解决控制本身的问题,还要花费大量精力处理3D空间里的姿势数据。因此,有必要将连续变化的姿态数据转变为六自由度电动缸连续变化的位移数据。连续变化的姿态数据也就是上平台的驱动样条曲线,导入到SolidWorks Motion中,通过运动仿真,可以分别得到六只电动缸的电动缸杆伸缩位移与时间曲线(具体做法第3节已进行了详细的介绍)。通过转换,六自由度平台的控制变成了仅与不同时间的位移值有关,进而使得控制方法更加简单。
4.3 对所述位移与时间关系的曲线进行预处理
检查所有数据是否在六自由度平台的技术参数范围内,如果超出应进行调整。①、调整各姿态的速度值,使处理后的位移与时间关系的曲线的速度低于最大速度值,保证动作速度不会过快;②、调整各姿态的加速度值,使处理后的位移与时间关系的曲线的加速度低于最大加速度值,保证动作受力不会过大;③、调整各姿态的加速度变化率,使处理后的位移与时间关系的曲线的加速度连续,且加速度变化率低于最大加速度变化率,保证动作的平滑性且受力是连续的。
4.4 将预处理后的位移与时间关系的曲线输入到六自由度平台控制器
将预处理后的位移与时间关系的曲线输入到六自由度平台控制器中,使上述控制量转换为电压控制信号,使各电动缸进行动作,以达到六自由度平台配合影片动作的效果。
5 结束语
本文详细阐述了六自由度平台在游乐设备黑暗乘骑项目中的应用,并利用SolidWorks对平台进行了建模和运动学仿真。仿真结果直观地表现出平台的运动状态,通过与驱动方程对比,验证了仿真的正确性及合理性。文中所涉及的一些研究方法和思路,特别是六自由度平台的数据输入及控制方法,可为今后六自由度平台应用于类似的项目提供了可以借鉴的理论和实践经验。
[1]高健.基于虚拟样机技术的六自由度空间对接平台研究[D].重庆:重庆大学,2011.
[2]黄晓敏.基于MATLABA的六自由度平台研究[D].广州:华南理工大学,2013.
[3]夏发平.工业机器人运动学建模与仿真研究[D].武汉:华中科技大学,2013.
[4]任良成, 林成, 陈思华.六自由度摇摆台的机电液一体化仿真研究[J].液压与气动, 2004.
[5]樊炳辉, 苏学成, 李贻斌, 徐国华.运动仿真在结构设计中的应用[J].工程图学学报, 1994.
[6]许贤泽.空间关节型机器人轨迹规划[J].甘肃工业大学学报, 1994.
[7]杨达毅, 陈丽敏.基于 SolidWorks的六自由度液压平台运动仿真[J].机床与液压, 2008.
[8]VENNISHMUTHU V,AHAMMED S R,RASHEETH H,et al.Stability Simulation of Six DOF manipulators using ADAMS and MATLAB [J].IOSR Journal of Engineering,2014,4(3):9-12.
[9]江洪, 陆利峰, 魏峥.SolidWorks动画演示与运动分实例解析[M].北京:机械工业出版社, 2006.
[10]DS SolidWorks公司.SolidWorks Motion 运动仿真教程 [M].北京: 机械工业出版社, 2012.
