静止轨道卫星南北位置保持推力器效率补偿方法及应用
2018-09-15邱瑞左子瑾戴雪扬
邱瑞 左子瑾 戴雪扬
(北京空间飞行器总体设计部,北京 100094)
地球静止轨道卫星位置保持是卫星长期在轨管理工作中的重要测控事件,对于地球静止轨道卫星,南北位置保持克服卫星轨道倾角受太阳和月球摄动的影响。倾角摄动的短周期项很小,可以作为误差处理,主要考虑长周期项和长期项。主要的长周期项有幅值约0.004°的半月周期项和幅值约0.023°的半年周期项。长期摄动使倾角按0.75~0.95(°)/年的速率变化,需要进行轨道倾角修正[1]。
南北位置保持过程中,成对点火的2个10 N推力器在点火过程中对卫星的X轴产生控制力矩,滚动角不可避免地会出现正向超调[2],卫星姿态会出现波动,严重时会影响用户使用,随着卫星用户对卫星姿态要求程度不断提高,开展避免南北位置保持时姿态超调过大的研究具有十分重要的意义。
本文通过对南北位置保持情况的分析,提出了利用推力器点火时间反推出推力器工作效率的在轨补偿方法,针对某在轨卫星在轨实际验证,成功地将卫星姿态超调量控制在0.15°以内。
1 南北位置保持原理及策略
静止轨道卫星每天在南北纬度方向周期性漂移是由于轨道倾角引起的,而倾角的漂移是太阳、月球摄动引起的,其结果是倾角矢量在一个近似圆锥面上进动,圆锥中心线的倾角大约为7.4°,并倒向黄极方向,以54年为周期作负方向旋转,其中太阳摄动引起半年为周期的波动,月球摄动引起周期为两星期的较小波动,它们是倾角变化的主要因素。静止轨道卫星受到太阳和月球的引力方向如图1和图2所示[3]。

图1 太阳对静止轨道卫星的引力方向示意图Fig.1 Sketch map of gravitation direction between sun and GEO satellite

图2 月亮对静止轨道卫星的引力方向示意图Fig.2 Sketch map of gravitation direction between moon and GEO satellite
为使卫星星下点不漂出其定点位置允许的范围偏差,在卫星即将漂出其范围前,对卫星进行南北位置保持控制,使其维持在允许的范围内。
南北位置保持控制采用倾角负偏置策略,在位置保持模式下向南加速,对轨道倾角矢量进行修正。为了使控后轨道具备开始正常运行和例行位置保持控制的条件,倾角矢量修正的目标应该使控后倾角为最大允许值,升交点赤经大约为270°(即所谓“负倾角”)[4]。
2 推力器效率补偿方法及效果
2.1 推力器布局
静止轨道卫星的轨道位置保持所需推力由双组元推进系统的10 N 推力器提供,某静止轨道卫星上共安装14个10 N推力器, 分成 A、B两个分支。推力器安装如图3所示。

图3 某静止轨道卫星推力器布局图Fig.3 Thruster layout of a GEO satellite
为了减小干扰力矩、提高控制精度和改善推力器工作条件,采取脉冲关调制方式进行轨道控制。由姿态与轨道控制计算机(AOCC)根据开关调制占空比要求,在两个推力器成对点火时推力器关调制工作,其他时间推力器开调制工作。
2.2 现象描述
某静止轨道卫星A在轨使用10 N推力器A分支进行姿态和轨道控制,南北位置保持使用成对10 N推力器6A和7A,2个推力器分别产生滚动方向正向和负向力矩,成对工作可产生俯仰轴方向的正向推力,以达到控制轨道倾角的目的。
该卫星在轨多次南北位置保持作业中发现,位置保持过程中滚动姿态角超调量过大,最高达到0.3°左右,该现象会使卫星业务受到部分影响。以某一次南北位置保持为例,位置保持过程中姿态角变化趋势见图4。

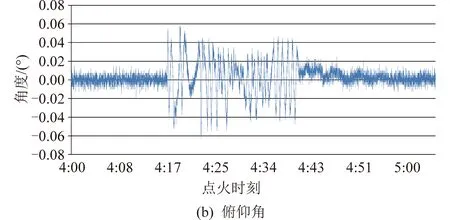
图4 南北位置保持过程中卫星A姿态角趋势图Fig.4 Attitude angle trendline of satellite A in NSSK
该星在南北位置保持过程中使用3个10 N推力器6A、7A成对点火,由图3可知滚动角出现正向超调,表明推力器6A的推力比7A大,在滚动方向产生了一个正向外力矩。同时俯仰姿态角变化的趋势范围为-0.05°~0.058°。
2.3 现象分析
静止轨道卫星A南北位置保持控制目前采用向北位置保持,轨道机动使用6A、7A推力器。6A、7A推力器点火时对卫星的X轴产生控制力矩,力矩值约为3.6 Nm,6A、7A成对点火进行南北位置保持时,滚动角不可避免的会出现正向超调,为了维持卫星姿态,星载计算机在南北位置保持过程中采用关调制的方式,通过减少某一推力器点火时间的方法抵消干扰力矩的影响,虽然这种调节方法可以保持卫星姿态,但由于时间滞后,位置保持过程中出现姿态超调现象是必然的。
2.4 补偿方法
针对南北位置保持过程中姿态角出现0.3°的超调量现象,可以通过调整推力器效率的方法,使星载计算机提前识别点火过程中产生的力矩偏差,减少力矩较大的推力器的点火时间(通过关调制实现)[5-7],最终达到减少姿态超调量的目的。
此次南北位置保持过程10 N推力器的点火时间统计见表1,轨道面法向速度增量为3.854 m/s,点火脉冲为542个。

表1 南北位置保持过程中10 N推力器点火时间
由图4和表1可知本次南北位置保持过程中10 N推力器6A的实际推力比7A大,推力器6A的点火时间比7A少147 s。
由于2个推力器的点火时间可以反映其力矩大小的不同,南北位置保持推力器效率补偿方法可以通过计算推力器6A与7A的点火时间来确定推力器效率,以此作为力矩补偿系数上注星载计算机,提前预知两个推力器的力矩偏差,在后续南北位置保持操作过程中减少卫星姿态超调,避免给卫星用户使用带来影响[8-9]。
可以利用两个推力器点火时间的比值来反推出推力器工作效率。设置推力器7A的工作效率为1,则有:推力器6A效率=7A点火时间/6A点火时间=698/551≈1.27。
考虑到余量,在后续南北位置保持中选择推力器6A的效率为1.25,推力器7A效率不变,仍然保持原来的效率值1。图5给出了推力器6A效率补偿后南北位置保持过程中姿态角变化情况。


图5 卫星A推力器效率补偿后姿态角趋势图Fig.5 Attitude angle trendline of satellite A after efficiency compensatory
从图5中可以看出,推力器6A效率调整后,位置保持过程滚动姿态角超调明显变小,在点火开始时滚动角超调量消失,而在点火结束时滚动角超调量为0.12°;俯仰姿态角的趋势范围为-0.058°~0.05°,与补偿前基本一致。
本次南北位置保持过程10N推力器的点火时间统计见表2,轨道面法向速度增量为3.983 m/s,点火脉冲为585个。

表2 南北位置保持过程中10 N推力器点火时间
由表2可以看出推力器效率补偿后南北位置保持过程中推力器6A、7A点火时间相差不大。同时推力器效率补偿前后的两次南北位置保持控制量和脉冲个数基本相同,但补偿后的南北位置保持过程推力器点火时间明显增加。
3 推力器效率补偿方法应用
同平台某静止轨道卫星B采用了相同的优化位保控制参数的效率补偿方法,图6为推力器效率补偿前后南北位置保持过程中滚动角变化情况。
由图6可见静止轨道卫星B采用了推力器效率补偿后效果显著,南北位置保持过程中的滚动轴姿态负向超调由-0.34°降低为-0.11°。


图6 卫星B推力器效率补偿前后滚动角趋势图Fig.6 Attitude angle trendline of satellite B after efficiency compensatory
4 结束语
本文针对某静止轨道卫星南北位置保持过程中出现的姿态超调量过大问题,提出了利用推力器点火时间反推出推力器工作效率的在轨补偿方法,通过在轨卫星的实际验证和应用,有效地将南北位置保持过程中姿态超调量控制在0.15°以内,进一步提高了卫星在轨管理水平。