基于ERDAS LPS的大数据量航摄遥感影像DOM制作
2018-09-13王海明张荣春陆
王海明张荣春陆 凤
(1.苏州高新区测绘事务所有限公司,江苏 南京215011;2.南京邮电大学地理与生物信息学院,江苏 南京210023;3.南京市长江河道管理处,江苏 南京241000)
0 引 言
数字正射影像图(Ditgital Orthophoto Map,DOM)是以航摄相片或遥感影像(单色/彩色)为基础,经扫描处理并经逐像元进行辐射改正、微分纠正和镶嵌,按地形图范围裁剪成的影像数据[1-2]。它具有地形图的几何精度和影像特征,且具有信息丰富、直观逼真、现实性强的优点。
由于技术条件及设备差异,且制作正射影像的数据来源不同[3],数字正射影像的制作有多种途径,如全数字摄影测量方法、单片数字微分纠正方法以及正射影像图扫描等[4]。本文结合某水电站测区大数据量、高分辨率的实际航摄影像资料,对运用ERDAS LPS 2010数字摄影测量系统制作正射影像的处理流程及注意事项进行较为详细地介绍。
1 ERDAS LPS简介
ERDAS LPS(Leica Photogrammetry Suite)是美国ERDAS公司研发的数字摄影测量系统。它提供多种航天-航空几何传感器模型设置、坐标系统定义、影像自动匹配、区域网空三加密、数字地面模型(DTM)自动提取、数字正射影像(DOM)制作等全线数据生产需求[5]。在高性能软硬件支持下,LPS以严密的数字摄影测量理论为基础,以流线型数据生产流程为核心,操作更简便、处理更高效,对于大数据量制作DOM而言更为适合。
2 LPS制作DOM流程
2.1 核心功能
LPS核心功能[6]主要包括支持各种传感器模型、自动内定向、自动像点量测、交互式像点量测、空中三角测量、正射影像纠正、正射影像镶嵌等基本的摄影测量工具,其处理流程与摄影测量的过程相符合,操作简便。
其中,空中三角测量计算作为摄影测量学的重要知识点,其精度好坏对航空正射影像图的质量影响很大[7]。空中三角测量方法的分类多种多样:按平差所采用的数学模型不同,可分为航带法空中三角测量、独立模型法空中三角测量和光束法空中三角测量3类[8]。其中光束法空中三角测量理论最严密,加密成果的精度较高。光束法区域网平差是以一张像片组成的一束光线作为平差的基本单元,以中心投影的共线方程作为平差的数学模型,以像点坐标为观测值,根据相邻像片公共交会点坐标相等、控制点的加密坐标与地面坐标相等为条件,求解每张像片的外方位元素和加密点的地面坐标的方法[9-10]。以上过程中必然用到的就是摄影测量学的经典共线方程式:

式(1)中,x、y为像点的像平面坐标;X S、Y S、Z S为站点的物方空间坐标;x、y、z为物方点的物方空间坐标;a i、b i、c i(i=1,2,3)为影像的3个外方位自元素组成的9个方向拿弦。
2.2 基本流程
LPS制作正射影像基本流程如下所示(图1)。
利用LPS进行正射影像制作首先需要创建*.blk格式的工程文件,其包含整个测区所有信息。工程文件建好并设置相机模型、投影参数等相关信息后,需将原始影像加载至测区影像列表中并进行影像间的关联。为增强影像显示效果及自动同名点定义,需要利用原始影像生成金字塔影像。内外定向参数设置也是整个处理流程中的关键步骤。内外定向参数设置正确与否,直接影响后续计算的准确性。数据准备工作做好后,就可以进行同名点匹配了。通常,需要首先量测控制点确定外定向参数,若已通过某些途径获得了初始外方位元素,则无需采集控制点即可进行外定向。完成匹配和精度检查后,即可进行空中三角测量,计算物方坐标,通过不断调整、剔除粗差,反复计算直至精度符合要求。空三计算完成后,自动提取DTM用于正射校正。最后经过正射影像拼接、镶嵌得到拼接后的DOM。
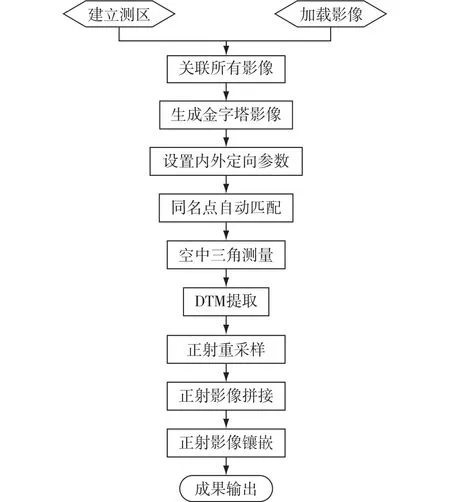
图1 LPS正射影像制作流程图
3 工程实例应用
本文以某大型水电站的实际项目为例,具体介绍运用ERDAS LPS软件完成大数据量航摄遥感影像DOM的制作过程。
3.1 项目概况
该水电站是以发电为主的大型水电水利工程,正常蓄水位370.00 m,总库容123.28亿立方米,有效库容57.85 m3。
3.2 数据准备
(1)影像数据:整个水电站分为3个测区共计1 500张航片,地面分辨率达0.2 m。
(2)投影参数:根据实际项目资料,采用自定义坐标系统。
(3)相机参数:采用专业数字相机Vexcel Ultra-Cam-X Digital Camera,内定向参数为:x0=-0.144 mm,y0=0.0 mm,f=100.5 mm;外 定 向参数由GPS和电子罗盘获取,为已知值(图2)。

图2 投影参数设置
3.3 具体过程
(1)建立名为i23toi34.blk的测区,并设置相应属性信息。
(2)加载影像并进行关联,成功后影像列表Online列显示为绿色。
(3)生成金字塔影像。此过程可灵活选取所需要的部分或全部影像进行金字塔图层计算。
(4)内外定向及相机参数设置好后,即进入同名点自动匹配环节。由于本项目的外方位元素已通过GPS和电子罗盘得到,故可省去量测控制点步骤,直接进行同名点自动匹配(图3)。

图3 同名点自动匹配结果报告
(5)空中三角测量计算。同名点匹配完成后,设置相关参数进行空中三角测量,剔除或修正误差过大的点,得到符合精度要求的空三计算结果。
(6)DTM自动提取。这是整个处理过程耗时最长的一步。由于数据量较大,且与电脑配置相关,该项目提取DTM的平均时间约为8 min/像对,对于几百张影像而言用时就需要十几甚至几十个小时。故建议选择分块处理更大数据量的项目,或者采取建立小型工作站的方式进行数据处理。
(7)正射影像处理。有了DTM成果后,通过正射影像校正、拼接、镶嵌等一系列处理即可得到最终正射影像成果(图4)。
图4 正射影像镶嵌结果
3.4 分析
简要分析LPS在某水电站实际项目中的应用情况,得到如下结论及建议。
(1)将镶嵌结果与矢量化文件叠加检查,重合度达95%以上,效果较好;DOM制作过程中几乎每一步都需要设置参数,参数设置恰当与否对中间结果及最终产品质量和精度都有一定影响,故每一步的参数设置都需经过不断尝试,选取合适的参数进行计算。
(2)为保证镶嵌处色调平滑,避免出现相邻影像局部色调差异过大的现象,在正射影像镶嵌之前,需要选择适当方法进行各种处理:如色彩纠正,可根据实际情况选择色彩平衡、直方图匹配或其他方法;同时,还可以进行平滑和羽化处理。但是,从图4可以看出,尽管经过处理,影像的色调分布仍然不是很均匀,可另外对其进行荧光处理。
4 结 语
根据LPS在某大型水电站的航摄遥感正射影像制作中的应用结果,表明对于多航带大测区高分辨率航摄影像而言,LPS可以完成正射影像的制作并达到精度要求。随着计算机技术和摄影测量学科的飞速发展,LPS对于高性能硬件支持的要求将更容易满足,加之生产作业经验不断积累以及生产技术水平不断提高,将LPS广泛应用于高精度摄影测量产品的制作将会对测绘行业发展起到促进作用。
