光纤Bragg光栅触觉传感器研究进展*
2018-09-11王飞文
王飞文, 冯 艳, 张 华, 张 震
(南昌大学 机电工程学院 江西省机器人与焊接自动化重点实验室,江西 南昌 330031)
0 引 言
触觉感知是生物体的基本功能,同样也是机器手与外部环境直接作用的重要手段之一,能够使得机器手感知接触目标的温度、应力、应变、尺寸、位置、表面形状等信息[1],可以帮助机器人准确检测、识别目标物,从而完成多种复杂的任务。随着智能机器人的进一步发展,所需触觉传感器[2~4]的数量逐渐增多,由此带来的测量电路稳定性、信号噪声、电磁干扰等问题不可忽视。另一方面,触觉传感器的封装以及其与机器手的集成工艺方法同样也是关键技术之一。相比于其他传感器,光纤光栅传感器是近20年来新兴的传感器件,集传感与传输于一体,具有体积小、抗电磁干扰、波长编码等特点,尤其是通过检测反射光谱峰值或传输光谱凹陷中心位置,就可检测到应力、温度、加速度等参数从而测出外界扰动,很适合应用于触觉传感系统中,在多触觉的传感测试领域有着广阔的应用发展前景。
国内外对于光纤Bragg光栅(fiber Bragg grating,FBG)的触觉传感、信息处理和加工工艺等方面开展了相应的研究,本文以FBG传感原理为基础,阐述了国内外FBG触觉传感器的研究现状,并对其未来的研究和发展进行展望。
1 FBG传感原理
1.1 FBG温度和应力传感特性
FBG[5,6]是光无源器件,其光纤栅格间隙沿着轴向周期变化。如图1所示,由光纤耦合模式理论可知,当一束宽带光源射入FBG时,因为折射率的不同会产生反射和透射的现象。其中满足Bragg反射条件的入射光会反射,同时透射光的传输谱会有一个凹峰。Bragg反射条件[7,8]为
λB=2neΛ
(1)
式中λB为FBG的反射波长,ne为光纤纤芯有效折射率,Λ为光栅的栅距或者光栅周期。由公式可知,如果使得光纤纤芯有效折射率和光栅的栅距发生改变,FBG的中心反射波长也会发生改变。

图1 FBG传感器原理与光谱
触觉传感器几个重要的测量量(温度、应力和应变)是引起FBG中心波长变化的主要原因,因此,可以通过中心波长的变化来感知外部环境的变化。通过特殊的机械装置,滑觉、加速度等的信号也可以测量。
温度的变化主要通过光纤的热膨胀效应影响光栅周期和通过热光效应影响光栅的折射率,当温度变化时,对式(1)两边求导
(2)

当FBG受到应力的作用时,可能产生轴向应力和横向应力,光纤光栅对于横向应力不敏感,一般只考虑轴向应力对光栅的影响。轴向应力对于光栅的影响是来自于拉伸引起的光栅常数变化以及弹光效应使光栅的折射率发生变化。两种作用下对中心波长的影响可以表示为
dλB/λB=(1-Pe)εx
(3)

当光纤光栅受到温度和力的同时作用,光栅中心波长的漂移为dλB/λB=(1-Pe)εx+(α+ε)dT。
1.2 FBG交叉敏感特性
由上述可知FBG传感器对于应变和温度交叉敏感,为了精确获得触觉传感的信息,区分两者的作用尤为重要。同时裸光纤的敏感度不高,需要进行增敏处理,需要考虑增敏器件的弹性迟滞对数据测量带来的非重复性的影响。另外,光纤微弯将产生光损失效应,即波峰的高度降低;当不均匀的力作用在光栅上时,光栅的栅距会变得不均匀,会产生不同的波峰,也称啁啾效应[9]。
2 FBG触觉传感器的研究现状
FBG传感器的基本测量物理量是温度和压力。基于此研究者[10,11]设计了一系列的温度和压力传感器,通过一些特殊的结构布置,可以获得位移、温觉、力觉、滑觉等一系列的物理信息。
2.1 FBG力触觉传感器
检测力或者力矩的信息对于机器人的精确操作极其重要,机器人技术的发展,其具有的优势使其在力触觉传感上得到迅速发展,且各国在力觉传感器的基础上,进行了多维力觉传感器和阵列式触觉传感器的研究。
2001年,比利时学者Fernandez A等人[12]利用光纤光栅多路复用的特点,如图2所示,将一根光纤上的8只不同波长的FBG布置在轮辐十字梁结构的横梁上下表面,上下2个表面的FBG传感器的中心波长的变化差作为测量量,以此解决温度和迟滞性的影响,实现了多维力的测量。

图2 A.Fernandez传感器结构体
2006年,韩国Heo Jin-Seok等人[13]提出了一种类似于人体皮肤的力觉传感器阵列,设计了2种结构(隔膜式和桥式结构)以解决光纤的微弯和啁啾效应,另设计1只不受力的FBG传感器用于温度补偿。文中将多个力觉传感器排布成阵列状,用于模仿人体皮肤。如图3,阵列后的两种结构传感器因为其空间分辨率的不同,隔膜式传感器的空间分辨率为25 mm、力的最小敏感度达到了0.005 N,与人体表皮皮肤相似;桥式传感器的空间分辨率为5 mm、力的最小敏感度达到了0.001 N,与手指皮肤相似。对模型进行了压力测试,实验结果表现出良好的力学效果。传感器阵列应用于外科手术套上,可获取手术的接触力觉信号。

图3 类皮肤触觉传感器
2008年,斯坦福大学Park Y L[14]设计了一种嵌入式FBG传感器的力感知手指,如图4,该手指结构可以感知二维方向的作用力,设计手指壳体为六角网状结构的聚合物结构,并在其中植入铜网以减少聚合物的蠕变性,4只传感器在手指关节处沿着周向均匀分布,另外还有1只传感器置于手指关节的中间铜管内,不受力的作用,用于温度补偿。因为聚合物具有蠕变性和滞后性,该研究介绍了一种处理滞后性的方法,当力小于一定值时认为接触已经结束了。实验结果表明:该结构的传感器可以分辨0.1 N的力,且不仅可以测量力的大小,也可获得力作用位置、深度信息。

图4 触觉手指结构
2009年,西班牙Ismael Payo等人[15]提出了一种基于FBG传感器测量高柔性梁扰度的方法。研究者将FBG传感器附着在横梁表面的特定位置,以测量局部应变。传感器的数量和最优的分布位置是通过切比雪夫准则确定,如图5。通过静态和动态实验,验证了估计方法和传感器系统的有效性,并应用FBG触觉传感器测量了单连杆机器人指尖的位置和旋转角度。同年,德国Muller M S等人[16]设计了一种基于FBG的六自由度的力矩传感器。如图6,将同一根光纤上的6只FBG传感器拉紧后,分3组呈120°交叉缠绕布置在Stewart平台的凹槽中。由于预紧力的作用,该传感器可以测量正负应变。每个传感器的长度为3 mm,避免因为弯曲而出现双折射的现象。实验得出最大力的分辨率为100 mN。
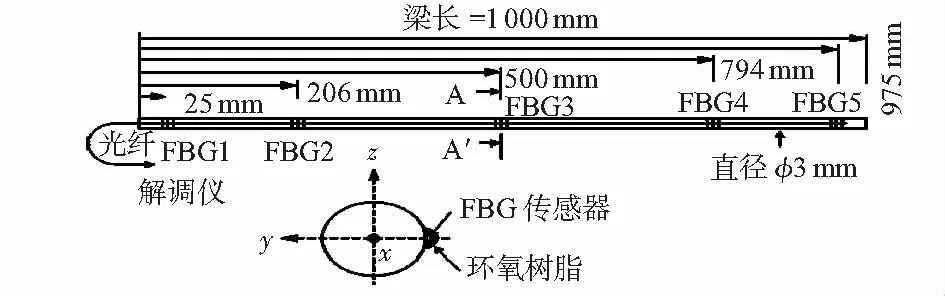
图5 传感器的位置和分布
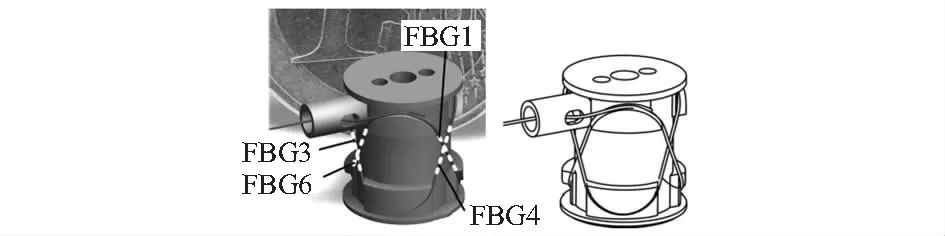
图6 传感器的三维结构
2012年,比利时Yan C X等人[17]研究了不受温度影响的应力触觉传感器,如图7所示。将FBG内接在具有高双折射的微结构光纤中,由于微结构光纤的正交极化作用,可以反射出2个分离的Bragg峰信号,作为传感信号可以得到2种模态:共模态和差分模态。共模态下可以在恒定的温度下测量压力,灵敏度达到了2.6 pm/(km·Pa)。差分模态下可以在变温下测量压力,但灵敏度较差,研究者在其中嵌入钢板以提高灵敏度,最终获得了较好的灵敏度。
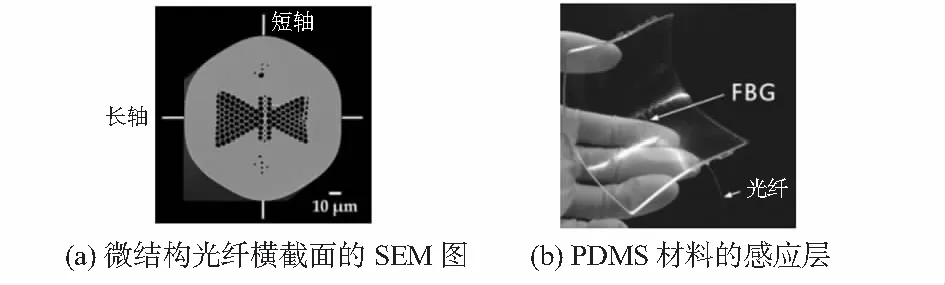
图7 不受温度影响的应力触觉传感器
2014年,韩国国家技术科学院Hyowon Moon等人[18]将FBG传感器与柔性硅橡胶材料结合,利用FBG对轴向应变敏感,研制了超细柔性位置形态传感器,如图8。3条光纤排成三角状,每条光纤上都含有4种不同波长的光纤光栅。测量时各节点上的温度相同,研究者可以得到该节点的弯曲方向θ和曲率k。再通过对各节点的3次样条插值处理,可以得到形态传感器的外形状态。
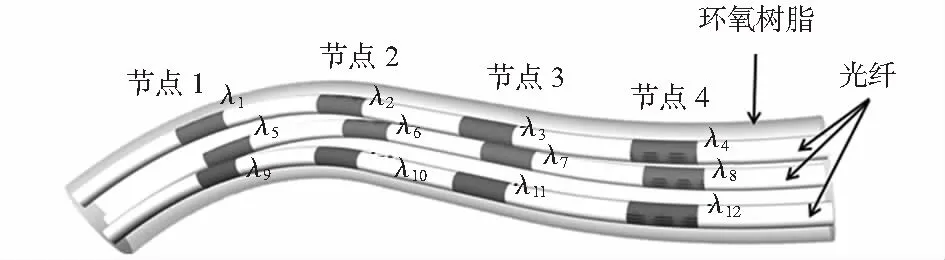
图8 形态传感器结构
2015年,山东大学的研究团队[19]研究FBG传感器的动态响应特性,根据被检测信号频率的不同分别进行了高频检测和低频检测。检测的结果采用了双FBG匹配解调法解调,该方法不仅测量效果好而且可以补偿温度。高频检测是对超声进行检测,一般应用在探伤等领域,研究者主要探究了传感器光栅长度、FBG布置位置、反射率等对高频信号的响应。低频检测主要对碰撞冲击信号进行检测,检测结果表明FBG传感体具有良好的动态响应效果和灵敏度,将其应用于人工皮肤的触觉传感器上,设计了一种3×3的阵列FBG触觉传感器。
2016年,中国武汉科技大学的郭永兴等人[20]设计了一个基于FBG原理的三维力指尖传感器,该传感器能感受沿着手指的轴向力和手指的周向力。如图9,可以知道该传感器分为内、外测量体,在外测量体的4根横梁上分别布置4只FBG传感器,用来测量手指的周向应力;内测量体布置2只FBG传感器,其中1只预紧后用于测量轴向力,另1只处于自由状态,用于温度补偿,这6只中心波长不同的FBG传感器均在同一根光纤上。实验表明该传感器可测量周向力的最小精度是0.060 N,轴向力的最小精度是0.045 N。

图9 三维力指尖传感器
2.2 FBG滑觉传感器
目前,基于FBG原理的滑觉传感器报道相对较少,越来越多的人开始了对于FBG滑觉传感器的研究。表现为:通过检测位置的变化来检测物体是否滑动;通过滑动时产生的高频信号来检测物体是否滑动;通过摩擦系数的变化来检测物体是否滑动。第一种方法要建立合适的触觉阵列才能完成检测;第二种方法一般会使用类似橡胶皮肤的物品贴在表面以增强信号,信号的处理采用时域分析或者音频分析;相比较于前两种方法,第三种可以在将要滑动时检测出滑动的趋势。
第一种方法的本质是将摩擦力转变成位移量以方便FBG传感器检测,一般而言,需要设计一种特殊的机械装置完成两个量的转化。如浙江理工大学的研究人员[21]提出了一种利用光纤微弯会有光损失的原理,将滑动产生的位移通过特殊机械装置转变成光纤的弯曲。同理,一些研究者已经设计出基于FBG原理的位移传感器[22],在此基础上改进就可完成对滑动的检测。因为该方法需要滑动后才能检测出来,在一些特定的条件下具有一定的劣势。
第二种方法是检测滑动产生的振动信号是否包含高频分量来检测滑动。目前对振动信号检测比较合适的材料为膜压电材料和快速响应压阻材料。2010年,Schoepfer M[23]提出可以利用加速度传感器来实现滑觉传感振动信号的采集,目前,基于FBG原理的加速度传感器已经有了一定的研究。
考虑到前两种方法都要具有一定的滑动才能检测到滑动的,第三种可以在滑动之初就可以检测出物体的滑动。其主要原理是通过摩擦力和法向力的比值计算出摩擦系数,由库伦摩擦模型可以知道动摩擦系数小于静摩擦系数,因此,根据摩擦系数的变化情况就能判断物体是否滑动。Engeberg E D[24]利用一种拇指指尖的三维触觉传感器获取摩擦力和法向力来检测滑动,并设计了防止滑动的滑模控制算法。哈尔滨工业大学张庭等人[25]设计了一种三维触觉传感器手指,采用累积叠加估计法以判断是否摩擦力产生了突变,通过选择合适的采样长度和阈值可得到最佳的检测效果。
基于此理论,合肥工业大学的钱沐云等人[26]已经设计了一种基于FBG原理的传感器来检测滑动,如图10。2只FBG传感器平行放置,另外1只FBG传感器与前2只呈一定角度,该传感器可用于检测二维的力,将若干只传感单元排成1个阵列,这不仅可以检测滑动的趋势,还可以检测滑动的速度。滑觉实验表明:该结构可以判断物体是否滑移、滑移的方向以及滑移速度。上文所述的多维力传感器也可以改进以实现滑移检测。

图10 滑觉传感器
3 结束语
综上所述,光纤光栅由于其自身的优势逐渐被研究者关注,研究思路多集中于对于光纤光栅传感器的布置、传感器结构的设计和构建以及性能的测试等方面,未来光纤光栅传感器用于智能机器人触觉传感领域将大有可为:
1)FBG触觉传感器的重要研究方向之一是力触觉的感知,通过对力传感单元的重构,可以实现FBG滑觉传感。
2)由于光纤信号需要解调,不能像传统的传感器一样易于和传统的电信号融合,如何将光纤信号和电信号有机地融合是一个研究的重点。
3)FBG传感器易于分布式传感,对于仿人肌肤触觉传感,构建基于神经网络的FBG触觉传感系统将是进一步研究重点之一。
