逆向可变车道释放特性及其安全评价
2018-09-10曲昭伟奇兴族陈永恒陶楚青白乔文刘芳宏
曲昭伟,奇兴族,陈永恒,陶楚青,白乔文,刘芳宏
(吉林大学交通学院,长春130022)
0 引言
随着城市交通拥堵日益严重,常规交叉口设计逐渐无法满足日益增长的交通需求,尤其是对于展宽受限的交叉口.因此,国内外学者开始研究非常规交叉口设计来提高信号交叉口的通行能力,其中包括Hummer等[1]模拟分析了U型回转交叉口、蝴蝶结型交叉口设置的利弊与适用条件;Reid等[2]提出了扇形交叉口的设计方法及通行规则,并与传统交叉口进行了对比,得出可有效降低交叉口的停车延误和行程时间的结论;Jagannathan等[3]提出了移位左转的交叉口设计,并通过VISSIM仿真验证了移位左转可显著降低交叉口的平均延误;Zhao等[4]对设置逆向可变车道的交叉口潜在的安全风险进行了分析和检验,但缺乏对逆向可变车道车流与左转专用车道车流在交叉口发生冲突的安全评价,并且缺少对预信号发生违规侵占后产生的影响分析.
逆向可变车道作为一种新型交叉口的通行方式,在进口道上游的中央分隔带设置开口,使左转车辆在左转相位期间驶入对向车道完成左转,其设置方式如图1所示.逆向可变车道的正常运行需要主信号和预信号相互协调,信号配时如图2所示.其中,预信号的左转相位应在相交方向的左转相位结束后几秒启亮,目的是为了防止本向左转车辆与对向车辆发生冲突.并且,预信号的左转绿灯应先于主信号的左转绿灯结束,目的是为了防止左转车辆滞留在逆向可变车道内.

图1 逆向可变车道几何特征Fig.1 Geometric characteristics of the reversing variable lane

图2 逆向可变车道交叉口相位相序Fig.2 Signal control of the reversing variable lane
1 预信号红灯违规影响分析
但是,将对向车道作为左转进口道有悖于驾驶员的驾驶习惯,许多驾驶员容易忽视预信号的存在从而导致在红灯期间驶错车道,引发安全隐患.并且,使用对向车道作为左转车道会使交叉口内左转车流的转弯半径和车速降低,在交叉口出口处易受到左转专用车道的车流干扰,从而增大了左转车流的平均延误.
综上所述,本文对逆向可变车道产生红灯违规的比例进行显著性检验,并分析预信号红灯违规后对向车流的行驶车速与行驶轨迹的变化;分析设置逆向可变车道后两股左转车流的释放特性及在交叉口出口处产生的冲突程度,采用实际调查数据给出设置逆向可变车道的影响程度,并与常规双左转车道进行显著性检验.
1.1 红灯违规
逆向可变车道由中央分隔带开口处的预信号和交叉口的主信号控制,因此,红灯违规行为根据发生地点的不同可分为3类.如图3所示,第1类为发生在预信号前的红灯违规,第2类为发生在逆向可变车道停车线前的红灯违规,第3类为常规进口道停车线的红灯违规.
对于第1类红灯违规,预信号控制着逆向可变车道的属性,在不同相位期间使逆向可变车道作为出口道或是左转车道使用,然而,驾驶员可能会忽视预信号从而发生红灯违规行为;对于第2类,左转车辆在预信号绿灯期间驶入逆向可变车道后,认为可以不再受信号控制随意的通过逆向可变车道的停车线,进而发生红灯违规行为;第3类则为常规红灯违规行为.本文将第3类作为对照组,分析设置逆向可变车道后是否会导致红灯违规比例增加.
调查地点为济南市经十路—舜耕路交叉口,分别统计红灯期间南北进口道3类红灯违规行为每周期发生的次数,使用逆向可变车道的左转车辆数及比例如表1所示,其中逆向可变车道的使用率均低于左转专用车道,这是由于预信号的控制方式为先于左转主信号相位变红,其目的是为了避免车辆发生冲突.

图3 红灯违规类型Fig.3 Red-light violation types
由表2可得,被调查交叉口类型1的红灯违规比例明显高于类型2和类型3,原假设为发生类型1与类型3的红灯违规比例相同,取显著性水平α=0.05,检验结果显示类型1与类型3的差异有统计学意义(p<0.05),即逆向可变车道的设置会增大预信号前的红灯违规比例.类型2与类型3的原假设为发生类型1与类型3的红灯违规比例相同,取显著性水平α=0.05,检验结果显示类型2与类型3之间的差异无统计学意义(p>0.05),即逆向可变车道的设置不会增大主信号红灯违规比例.
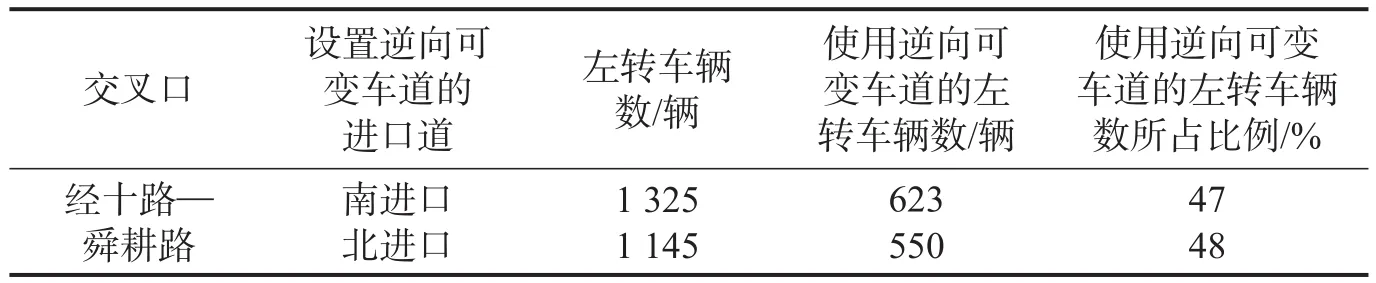
表1 被调查交叉口及左转车辆数Table 1 Number of measured left-turn vehicles at the surveyed intersections

表2 各类型红灯违规卡方检验Table 2 Chi-Square test of red-light violations
1.2 违规侵占对向车道
由于在红灯期间存在调头车辆和左转车辆车头违规侵入对向车道的行为,因此,在逆向可变车道内的对向车辆会受预信号前违规车辆的影响,行驶轨迹及行驶速度发生明显变化.如图4所示,在预信号发生红灯违规后,行驶在逆向可变车道内的对向车辆会避让开口处的左转或调头车辆,从而导致3条出口车道仅行驶2条车流,对出口道车辆造成延误.
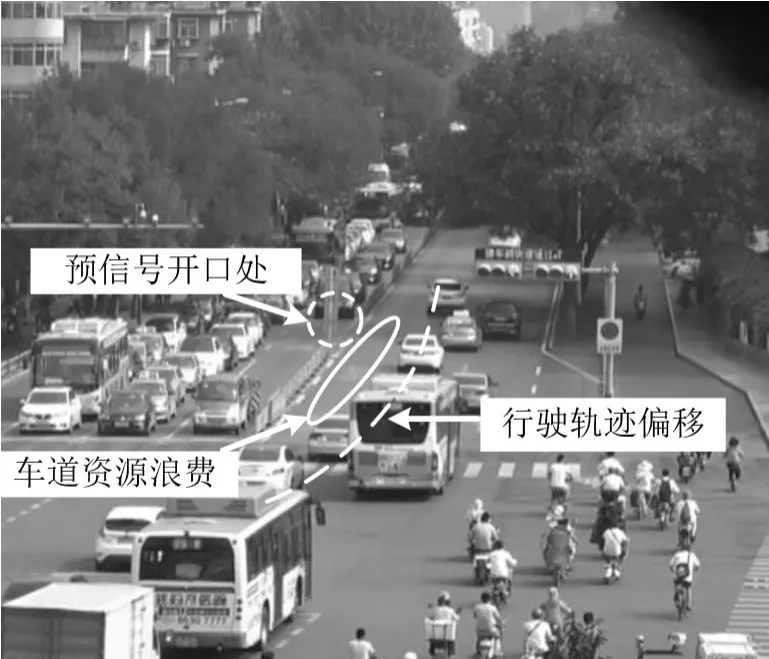
图4 对向车辆行驶轨迹发生变化Fig.4 Changes to the trajectory of the opposite vehicle
根据以上对出口道对向车辆行驶变化的分析,将设置预信号后逆向可变车道内对向车辆的行驶速度设为组1,将未设置预信号的常规出口道车辆的行驶车速设为组2.组1样本数据获取地点为经十路—舜耕路交叉口北出口道,组2期望数据获取地点为经十路—纬一路南出口道,对这2组行驶车速进行卡方检验,原假设为组1与组2的行驶速度无差异,取显著性水平α=0.05,检验结果如表3所示,组1与组2的差异有统计学意义(p<0.05),即设置逆向可变车道后组1的行驶速度明显低于正常的行驶速度.
从表3可得设置预信号后出口道车辆的行驶速度低于未设置预信号的同等级常规出口道车辆行驶速度的15.31%,卡方检验也表明这2组行驶速度的差异有统计学意义.此外,组1的峰态系数高于组2,表明设置逆向可变车道后的最内侧出口道车辆的行驶速度变化较大.因此,在设置逆向可变车道前应给出逆向可变车道作为出口车道时的限速提示,同时对红灯期间侵占对向车道的左转辆进行警告和惩罚措施,提高出口道车辆行驶的安全性.

表3 行驶速度卡方检验Table 3 Chi-Square test for the travel speed
2 交叉口内左转车流车头时距特性分析
通过预信号进入逆向可变车道的左转车流在主信号绿灯期间与左转专用车道的左转车流同时驶入交叉口,为了分析2股车流在交叉口内部相互干扰程度,本文通过视频观察及人工统计来收集逆向可变车道和左转专用车道的车流在释放过程中3个位置点(即观测点A、观测点B和观测点C)的车头时距,运用数理统计等方法来描述逆向可变车道在交叉口的释放情况,具体观测点位置如图5所示.
本文的样本收集点在济南市舜耕路—经十路交叉口,该交叉口为典型的逆向可变车道交叉口,其4个出口道均设置了1条逆向可变车道,视频采集了3个工作日7:30-9:30高峰期间的随机样本.
通过剔除收集到的不合理的数据,包括受上一相位滞留车辆的影响、车辆违规行驶的影响和释放末期非饱和数据等,以交叉口每周期时长为1个时距,建立车头时距与观测点位置和观测车辆的关系图,如图6所示,其中逆向可变车道与左转专用车道释放的左转车流在出口点的平均车头时距均大于入口点.
逆向可变车道与左转专用车道在3个位置点的饱和流率与平均车头时距之间的关系如图7所示.从逆向可变车道与左转专用车道的独立分析角度看,逆向可变车道的左转车辆在3个位置的饱和流率呈现递减的趋势;而左转专用车道的饱和流率在中间位置为最大值.此外,逆向可变车道与左转专用车道在出口位置的饱和流率均为3个位置点的最小值.由此可以得出两股左转车流在出口处存在相互干扰的现象,并且逆向可变车道的左转车流受干扰程度较大.
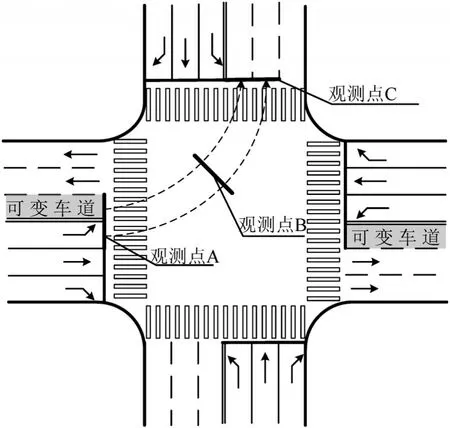
图5 车头时距采集点Fig.5 Headway collection location
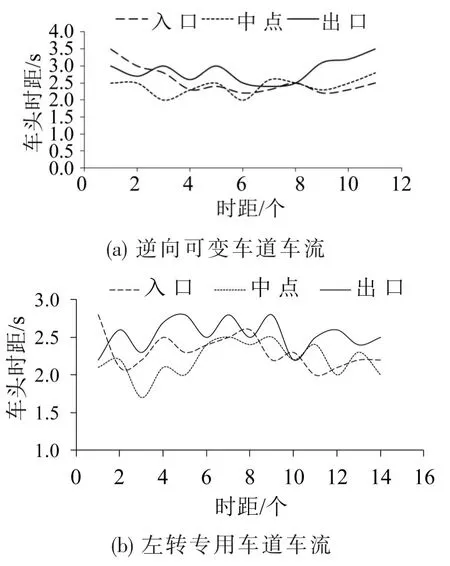
图6 各采集点平均车头时距变化趋势Fig.6 Average headway trends of each collection location
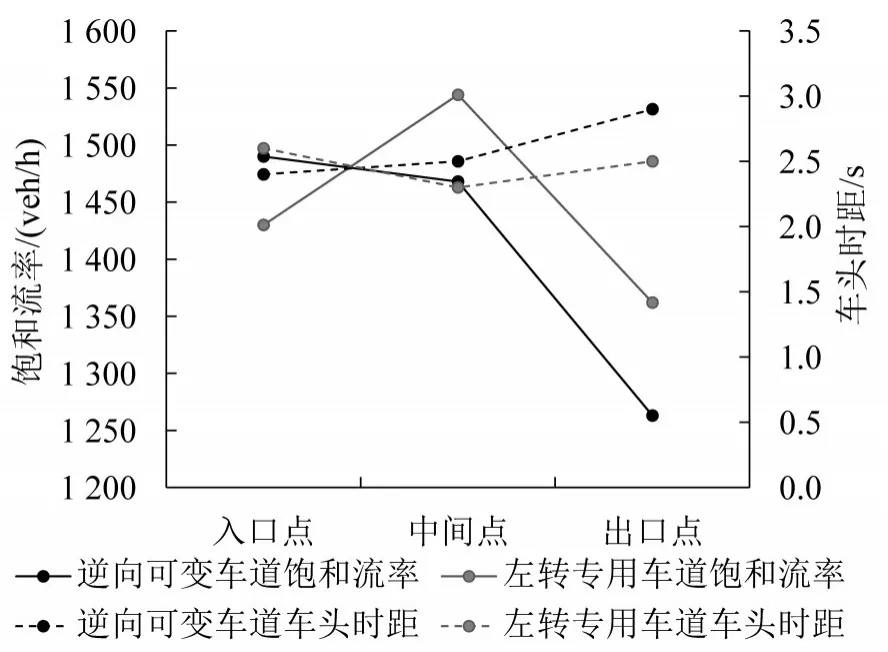
图7 平均车头时距及饱和流率变化趋势图Fig.7 Average headway trends and saturation flow rate of each collection location
3 交叉口内左转车流释放轨迹特性分析
为了能够有效地反映交叉口内左转车流的轨迹状况,本文选取济南市舜耕路—经十路交叉口的南进口道进行高空拍摄,并使用Track Pro软件提取车辆的时空轨迹.最终提取了115组逆向可变车道车流与108组左转专用车道车流在出、入口位置及空间轨迹的随机样本数据.
由于交叉口内左转车辆的运动轨迹在入口处的导数接近无穷大,在出口处的导数趋近于零,因此,本文分别通过指数函数、二次函数、幂函数对车辆轨迹进行拟合,3种函数的表示形式为
式中:a、b、c、d、m、n、k、p、q和r为以上3种函数的参数值.
表4给出了3种函数的拟合结果,指数函数的R2均值明显大于二次函数与幂函数,表明指数函数的拟合效果最优,因此本文利用指数函数拟合左转车流在交叉口的空间轨迹图[5],并给出了出入口左转车辆的位置分布图,如图8所示.

表4 左转轨迹拟合结果Table 4 Result of fitting for left-turning trajectory

图8 出入口车辆位置分布及空间轨迹图Fig.8 Entrance and exit of the vehicle location distribution and space trajectory
由图8可得,逆向可变车道的左转车流在驶出交叉口时选择最内侧的出口车道的概率为91%,而左转专用车道的左转车流驶出交叉口时选择最内侧的出口车道的概率为17%,因此,每周期约有1/5的左转专用车道的车流与逆向可变车道的车流发生冲突.并且,由于逆向可变车道的车流转弯半径小于左转专用车道的车流,所以在释放过程中车速低于左转专用车道的车流,在出口处发生减速甚至停车避让左转专用车道的车流,对逆向可变车道的左转车流造成较大的延误.
4 左转车流释放过程安全评价
4.1 PET冲突区域确定
由于逆向可变车道与左转专用车道的2股车流行驶到出口处会发生较多的冲突和延误,因此,本文采用PET(后侵入时间)[6]来描述2股车流产生冲突的严重情况,PET冲突区域由现场观察及空间轨迹图确定,由于左转车流在转弯过程中不断调整轨迹,冲突车辆之间的潜在碰撞位置并不是固定点.为了准确估计冲突车辆的PET值,选择图9所示的区域为2股车流的冲突区域,首先确定车流产生冲突的位置(初始时刻t0),然后记录侵占车辆(即灰色车辆)离开冲突点的时间(t1)和跟随车辆(即黑色车辆)到达冲突点的时间(t2),最后计算t2与t1的差值作为车辆之间汇合冲突的PET值,这个过程如图9所示.
4.2 PET分布值检验
通过视频收集了经十路—舜耕路交叉口349个汇合冲突的PET随机样本数据,最大的PET值为5.2 s,最小的PET值为0.6 s.图10给出了PET值直方图(左侧)和累计分布曲线(右侧).结果表明,所有PET值均在最大PET阈值(5.5 s)以下,证实了信号交叉口左转车流PET阈值的有效性[7].对于逆向可变车道在出口处冲突的严重程度,由图10的累计分布曲线可得,在大约为23%的曲线百分比处出现第1次拐点,对应的PET值为1.5,因此,这个PET值作为严重冲突的临界点,即PET<1.5 s为严重冲突范围.其余的分类与Souleyrette[7]的类似,将剩余的PET范围按40%平均分布为轻度冲突和潜在冲突的范围,最终给出了逆向可变车道与左转专用车道的车流在交叉口出口处的PET值分布表,如表5和表6所示.
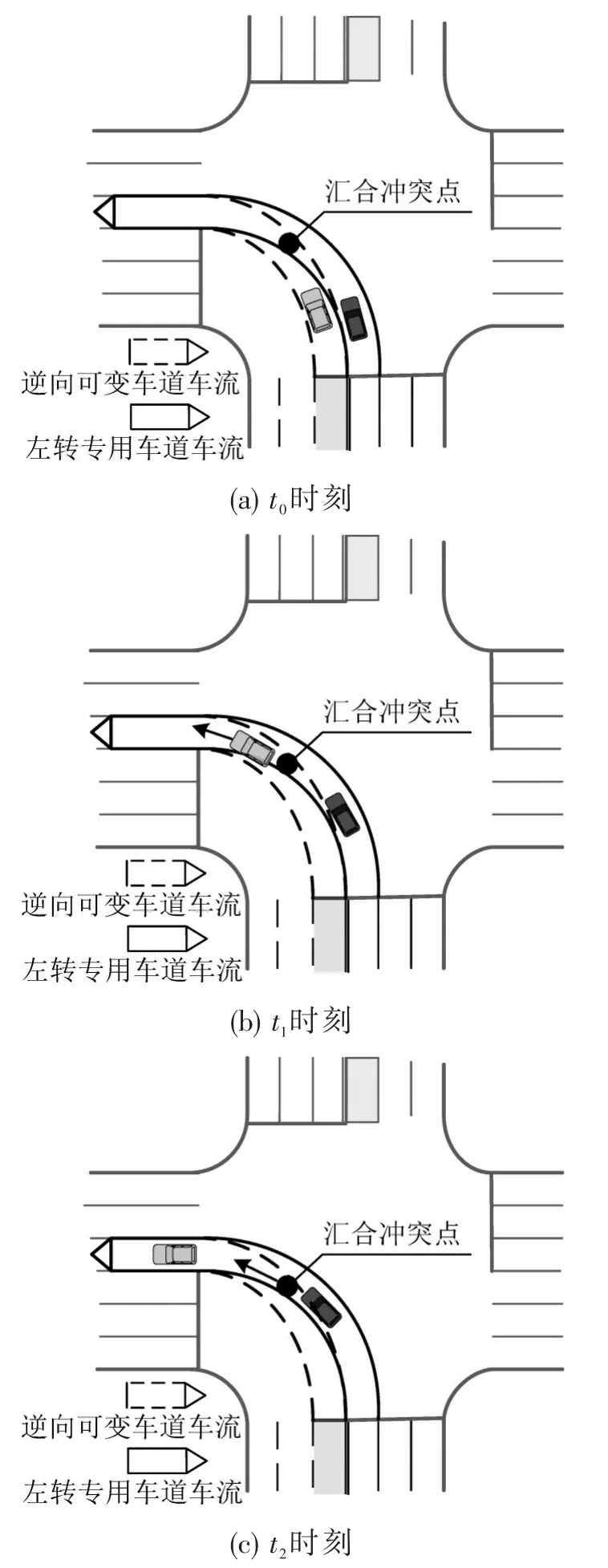
图9 逆向可变车道的PET值区域确定Fig.9 Estimation of the PET values for the conflicted merging vehicles at RVL
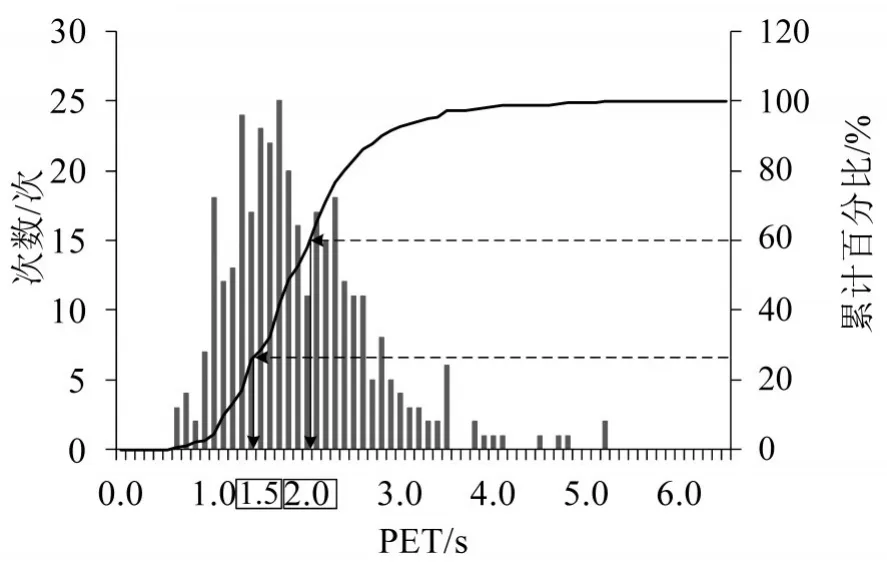
图10 PET直方图与累计分布曲线Fig.10 PET count histogram and accumulative distribution
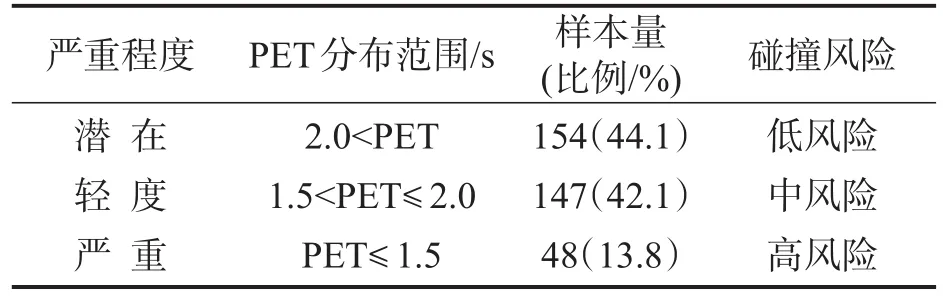
表5 左转PET严重程度分布Table 5 PET value distributions by severities for the left-turn movement

表6 常规双左转PET严重程度分布Table 6 PET value distributions by severities for the left-turn movement
为了分析逆向可变车道的设置是否对出口处产生的冲突有显著影响,采用多路左转进行对比分析[8],本文将同等级的经十路—纬一路交叉口双左转车道的左转车流在出口处的PET分布值作为对照组,通过卡方检验来得出逆向可变车道的设置是否会增大左转车流在出口处的冲突程度,原假设为PET冲突程度不变,取显著性水平α=0.05,检验结果如表7所示.结果表明设置逆向可变车道后左转车流在出口处的冲突程度显著增大,根据调查发现部分左转专用车道车流习惯行驶到最内侧的出口道,容易导致逆向可变车道的左转车流发生避让和减速让行的行为,从而产生更高比例的冲突次数.
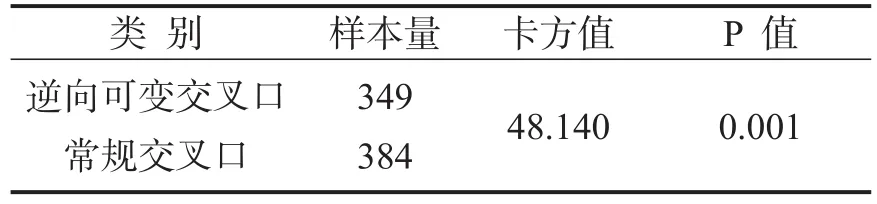
表7 逆向可变交叉口与常规交叉口冲突程度卡方检验Table 7 Chi-Square test of traffic conflicts between intersections with RVL and without
5 结论
本文从逆向可变车道的安全角度出发,通过统计数据和显著性检验发现:逆向可变车道的设置不会增加主信号红灯违规的比例,但是会增加预信号红灯违规的比例(高于常规主信号1.3%);违规侵占的左转车辆会使行驶在逆向可变车道的对向车辆的车速发生明显的下降(低于正常行驶车速15.31%);对逆向可变车道和左转专用车道的2股车流在交叉口内3个位置的车头时距进行统计,并对2股车流在交叉口内的行驶轨迹进行提取和分析;统计分析给出了逆向可变车道的左转车流在释放过程中的PET冲突程度表,显著性检验结果显示逆向可变车道的设置会明显增大左转车流在交叉口出口处的冲突程度.由于影响逆向可变车道正常运行的因素较多,今后可对逆向可变车道的安全评价进行补充,进一步细化设置逆向可变车道对交叉口正常运行的影响.
