西门子PLCSIM与Wincc flexible的联机调试
2018-09-10赖丽莉
赖丽莉
摘要:该文对西门子PLCSIM与Wincc flexible联机的前提条件、连接、变量匹配、组态画面的设置、联机运行做了详细的分析,为程序的验证和调试提供了一种简单的方法。
关键词:西门子PLCSIM:Wincc flexible;联机
中图分类号:TP273.5 文献标识码:A 文章编号:2095—6487(2018)02—0030—02
0引言
众所周知,西门子S7-300的仿真软件PLCSIM在程序仿真运行方面,比原有的S7-200仿真软件强大许多,这为程序的检查和调试提供了很大的便利,但PLCSIM的界面比较简单,难以直观地看到程序在工业部件当中的应用。为了更加直观地看到程序执行的效果,我们通常把PLC与组态软件联机运行,这样做的前提是必须有PLC设备,但若临时条件不具备PLC设备,此时也可以通过PLCSIM与Wincc flexible的联机调试来达到同样的效果。
1联机的前提条件
首先,PLCSIM联机的组态软件只能是Wincc flexible,因为两者都是出自西门子公司,所以具有兼容性;其次,安装Wincc flexible时必须选择集成在STEP7中,这就要求软件在安装顺序上做到先安装STEP7,然后再安装Wincc flexible。
2联机调试的过程
为了方便展示,我们选择以具有水平移动效果的运料小车为例,来介绍PLCSIM与Wincc flexible的整体联机调试过程。
2.1 STEP7项目的建立
在STEP7中新建项目《运料小车》,并在项目位置单击右键,选择insert new object,在insert new object展开的菜单中选择simatic 300 station,simatic 300 station里面有一个hardware,可以在这里进行系统的硬件配置。硬件的基本配置是电源,CPU模块,数字量输入和输出模块,在symbols中定义各个参数的符号(主要包括三个限位开关,一个启动按钮,一个停止按钮,一个驱动小车前进的电动机正转输出以及一个驱动小车后退的电动机反转输出),这样将使Wincc flexible里面的变量设置更加轻松。需要注意的是,由于输入寄存器Ⅰ为只读模式,组态仿真时无法写入状态,因此需要將输入寄存器Ⅰ更换成可以读写的位存储器M。
在blocks中插入主程序及子程序模块,编写运料小车的运行程序。
2.2 PLCSIM与Winoc fIexible通讯的确立
2.2.1选择触摸屏
程序编写完成后,回到simatic manager中,在项目树中插入simatic HMI station,此时系统将自动加载Wincc flexible的应用程序,并给予触摸屏选择界面,用户可以根据自己的需要选择合适尺寸的屏幕。确认以后展开项目树中的Wincc flexible RT,便可直接转到Wincc flexible的界面进行操作。
2.2.2建立连接
点击连接后,进入连接界面,新建一个连接,名称可以自行定义。参数的设置中需要检查触摸屏的接口是否为IF1B MPI/DP,保证HMI设备的地址为1,配置文为MPI,PLC设备的地址为2。
2.2.3建立和匹配变量
双击空白行即可新建变量,由于之前已经建立了PLC与HMI设备的连接,所以连接部分自动显示连接设备的名称。在连接状态下,只需展开符号栏的下拉菜单,展开项目中的符号表,选择要匹配的PLC变量,便可将PLC中的变量非常简单地与Wincc flexible中建立的变量进行匹配。
2.3组态画面的设置
在画布上分别布置一个小车,三个限位开关和两个按钮,其中,小车需要设置水平移动,与整数型变量car相匹配,并设定它的移动范围;而限位开关可以采用动画中的外观来改变图形颜色,若是选择的加载图片,则可以将两种代表不同状态的图片重叠,并设置上方图片的可见性与限位开关的变量相匹配即可;按钮的设置需要触发事件,若想设置成点动状态,则在按下时选择setbit函数,释放时选择resetbit函数对应按钮的变量。
组态运行时,若要让按钮触发小车水平移动,并使相应的限位开关自动通断,则需要额外的程序。我们可以在Wincc flexible中通过编辑脚本来实现,也可以直接在STEP7中通过程序来实现。若要通过STEP7的程序实现,那么可以新建一个子程序,在里面编写限位开关通断的条件,小车水平移动的条件及移动的速度。
限位开关的状态由小车位置存储器的值来控制,小车位置存储器的值发生变化时,对应限位开关也发生变化,如小车位置存储器=0时,说明小车在原点,原点的限位开关接通。
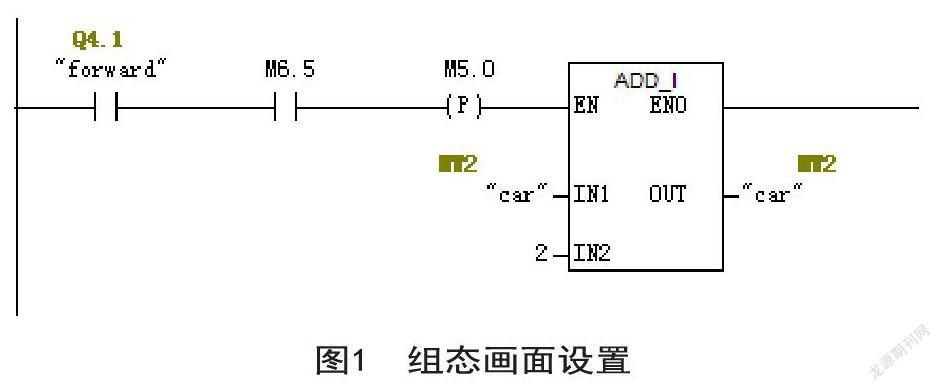
而小车前进的条件是电动机正转有输出的状态,小车前进的速度可以由一个时钟脉冲触点来触发一个加法指令,实现移动距离递增的效果。小车后退时的设置与之类似,只不过加法指令要换成减法指令,由此实现移动距离递减的效果。组态画面设置见图1所示。
2.4 PLCSIM与wi nec flexible的联机运行
将STEP7的所有主程序和子程序下载,并打开仿真软件PLcsIM使其处于run状态。点击Wincc flexible的启动运行系统快捷按钮,启动模拟触摸屏。此时可看出A点的限位开关处于接通状态,单击启动按钮,小车以时钟脉冲触点和加法指令控制的速度前进,当小车离开A点时,A点的限位开关断开;当小车到达B点时,B点限位开关接通,并根据程序停留5 s,以方便进行站点操作;5 s后小车继续前进,此时B点限位开关断开;当小车到达C点时,C点限位开关接通,同时小车停留6 s,进行站点操作;6s后小车开始后退,直到到达A点才停下来。在任何一个时刻点击停止按钮,小车立即停止运行。下次再按下启动按钮时,小车将自动先回到A点,然后再按照上述轨迹继续运行。整个流程可以根据需要增加或减少限位开关的站点,也可以在站点位置增加其他动作输出,由此满足各种生产线的需要。
3结束语
采用PLCSIM与Wincc flexible直接联机运行,进行程序的验证和调试,是一种非常简便而有效的方法。比起单纯使用PLCSIM,尤其是一些需要自动触发开关来触发下一个动作的工作过程,比如,运料小车需要限位开关决定它的前进后退,机械臂需要传感器决定它的上升下降,传送带需要限位开关决定它的启停等,组态动画不仅可以自动触发,而且还能将运动部件移动的状态反映出来。而相对PLC设备与Wincc flexible联机的方式,采用PLCSIM与Wincc flexible直接联机时,操作者只需要一台电脑便可以将PLC的程序通过组态动画的方式演示,省去PLC外围接线的繁琐和携带的不便,也可以在仿真软件联机调试运行成功之后再应用到PLC上,由此提高准确性。