多目标联合优化的信号配时方法应用与仿真
2018-09-10黄慧琼
黄慧琼


摘 要:为缓解交通供需矛盾导致的交通拥挤,通过分析交叉口交通流特性,制定匹配的信号控制策略,可以实现交通流的稳定性. 信号配时模型采用延误、停车率和通行能力三指标进行联合优化. 其中,延误模型采用改进的Webster法,停车率和通行能力选取传统的HCM法,将三指标配予相应的权数,转化为单目标函数,采用Matlab进行求解.最后以现实案例优化,并用Vissim对交叉口进行仿真评价,得到的结果有所改进.
关键词:交通拥堵;单点交叉口;信号配时;多目标联合优化;仿真
中图分类号:U491 DOI:10.16375/j.cnki.cn45-1395/t.2018.03.016
0 引言
长期以来,全国各地市积极开展交通治理工作,各项治理措施对节点交通疏解和拥堵的改善取得了显著效果.但随着机动车和道路交通流量的持续增加,改善效果逐渐弱化[1].国内外主要城市的交通管理措施和政策表明,单纯依靠交通供给策略来实现城市交通的有效治理己经很难实现[2].交通综合管理是一项长期的系统工程,当前,开展“大数据+信号灯”的科技治堵行动,是提升城市道路精细化管理水平的有效途径.通过对拥堵交叉口实施合理信号优化控制,有利于缓解日趋紧张的交通拥挤现象,提高交通效益. 单点交叉口交通信号控制是交叉口交通信号控制的最基本形式,也是道路交通线控、面控的基础.目前,对于城市交通网络的优化控制研究,大多是针对城市交通网络的交通流分配进行优化[3-4].也有文献提出了针对信号周期或信号时间区间进行优化,而所采取的优化方法大多为传统的优化方法[5].纵观众多学者的研究文献,大多集中在单点交叉口信号配时优化指标的选取、模型的建立以及算法的采用上,并且均对模型进行了实例分析[6-7].指标选取不一样,控制侧重点则不同;目标函数不同,也会导致控制目标不同,甚至连指标权重不一致,都会导致目标结果不相同.本文以交叉口平均延误、停车次数、通行能力作为优化目标,建立模型,力求三指标综合效益能达到较优值.
1 建立基于多目标联合优化的信号配时模型
城市交通信号控制系统的控制对象是由各种车辆组成的在被控制的区域内道路上行驶的交通流.对一个交叉口而言,交通流的运行情况是一个非线性的时变系统.单点交叉口信号控制基本参数有时间参数和流量参数,涉及通行能力、饱和度、延误时间、排队长度、停车次数、油耗等,反映了车辆通过交叉口时的动态特性,也是交叉口信号配时设计的性能指标[8].交通信号控制的目标就是要使各个子目标趋于最优化.因此,信号配时是一个多目标优化问题,可以用数学形式来表达各种变量之间的关系.
1.1 指标选取及模型
1)平均延误模型
选用在Webster模型基础上修正的延误公式.该模型一个周期时长内第i相位到达的平均延误时间为[9]:
3)通行能力
按照停车线法原理,第i相位的通行能力[Qi]计算公式为[10]:
1.2 目标函数构建
由于城市道路交通车流呈现很大的随机性,车辆行驶过程是一种随机过程,因此实施相位控制也应针对不同的车辆情况采取不同的方案.以往的Webster模型将车辆延误时间看作是唯一的衡量指标,以交叉口通行车辆总延误时间最少为目标[8-9].本信号控制模型与之相比增加了停车率和通行能力两个指标,目标是降低延误和停车次数,提高通行能力.但三目标之间关系复杂,提高通行能力需要较长的信号周期;相反地,信号周期过长会导致延误和停车次数的增加.若延误和停车次数继续增加将会降低通行能力.因此,要找出一个最佳周期时长和各相位有效绿灯时间.基于此,延误和停车率取最小值,通行能力取最大值,为使三者统一到一个目标函数下,取通行能力负数的最小值.由于各指标的权重不一致,因而设法分配不同的权值,最后求解目标函数的最小值.模型如下:
2 应用案例仿真分析
2.1 交叉口现状及存在问题
1)交叉口现状
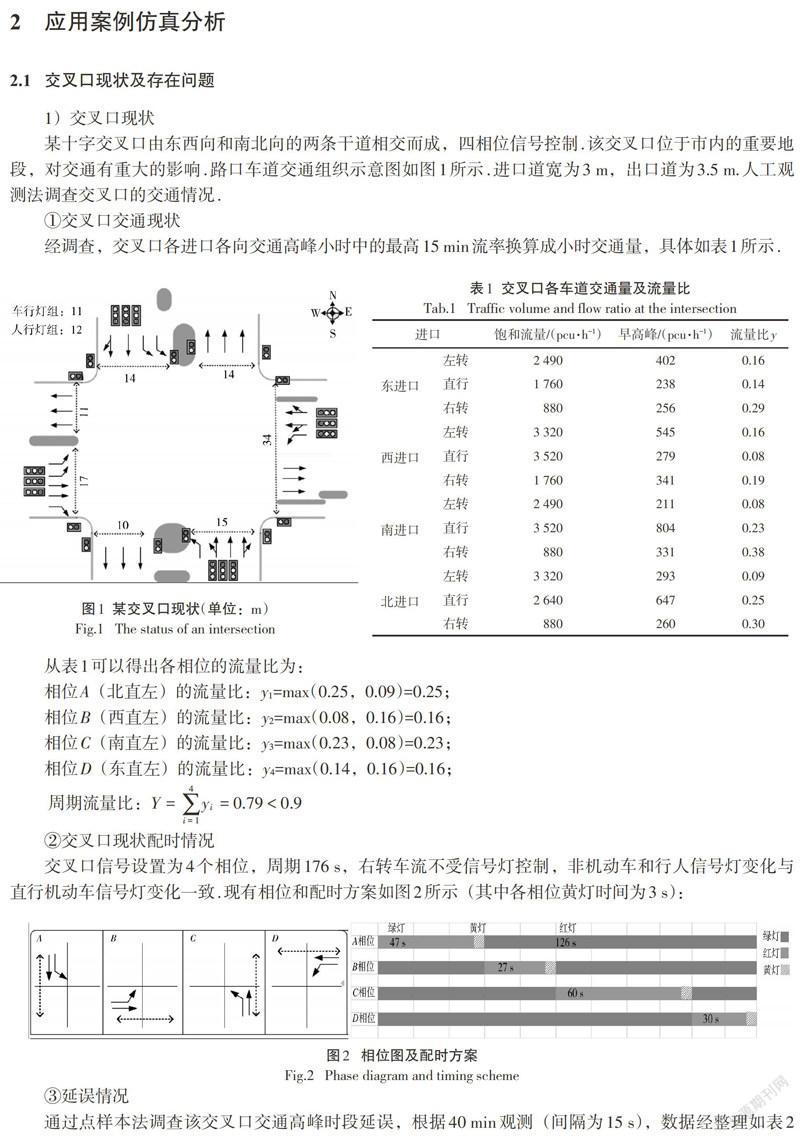
某十字交叉口由东西向和南北向的两条干道相交而成,四相位信号控制.该交叉口位于市内的重要地段,对交通有重大的影响.路口车道交通组织示意图如图1所示.进口道宽为3 m,出口道为3.5 m.人工观测法调查交叉口的交通情况.
①交叉口交通現状
经调查,交叉口各进口各向交通高峰小时中的最高15 min流率换算成小时交通量,具体如表1所示.
从表1可以得出各相位的流量比为:
相位A(北直左)的流量比:y1=max(0.25,0.09)=0.25;
相位B(西直左)的流量比:y2=max(0.08,0.16)=0.16;
相位C(南直左)的流量比:y3=max(0.23,0.08)=0.23;
相位D(东直左)的流量比:y4=max(0.14,0.16)=0.16;
周期流量比:[Y=i=14yi=0.79<0.9]
②交叉口现状配时情况
交叉口信号设置为4个相位,周期176 s,右转车流不受信号灯控制,非机动车和行人信号灯变化与直行机动车信号灯变化一致.现有相位和配时方案如图2所示(其中各相位黄灯时间为3 s):
③延误情况
通过点样本法调查该交叉口交通高峰时段延误,根据40 min观测(间隔为15 s),数据经整理如表2所示.
调查结果的分析处理为:总延误=观测到的停驶车辆总数×观测时间间隔;每辆停车的平均延误=总延误/停车辆数;交叉口引道上每辆车的平均延误=总延误/引道上总交通量;停车百分数=停车辆数/引道上总交通量[2].经计算得各交叉口实测结果,见表3.
2)存在问题
交叉口主要存在以下问题:①行人未能利用车辆左转时间过马路.②信号周期为176 s,车辆的平均延误比较大.
2.2 信号配时优化
1)相位优化
解决上述问题的步骤为:
①重新设计相位,设置行人二次过街,提高行人过街效率;
②运用上述的优化方法,确定周期时长,减少延误.
重新设计的优化相位图如图3所示.根据此相位图,行人可以利用左转时间过马路.
2)实例优化模型计算及验证
①Webster算法信號配时和指标计算
用Webster方法估算初始周期,然后计算各相位的大致信号配时.设计黄灯时间为3 s,绿灯间隔时间为4 s,起动损失时间为3 s.根据表1中的数据利用Webster配时公式进行信号配时,配时方案如下:
考虑到在对有效绿灯时间取整过程中可能出现误差,因此检验是否与周期相等.C[′]=39+25+35+25+16=140 s,检验发现相位信号时长比周期长2 s,故对相位A和相位D的有效绿灯时间进行调整,由39 s和25 s分别相应减少为38 s和24 s.
延误、停车率、通行能力计算结果见表4.
②三目标联合优化算法计算
目标函数为:
利用三目标联合优化算法的计算结果如表5所示.
③配时结果对比分析
将Webster法与优化算法的计算结果对比分析,见表6.
从表6可知,优化算法和Webster算法都优于原有的配时方案.优化算法与Webster算法相比,周期减小8 s,交叉口的通行能力增大57 pcu/h,而平均延误减小17.99 s,停车次数略小,交叉口的综合指标优化算法优于Webster算法.由此可见,本文建立的三目标联合优化模型应用在高峰期会有比较好的效果.
2.3 VISSIM仿真评价
微观交通仿真软件系统VISSIM是目前世界上最先进、功能最完善的仿真系统,具有分析、评价、优化交通网络、设计方案比较等功能.
根据交叉口的相位设计情况,几相位的交叉口信号系统则新建几个信号灯组;然后新建配时方案,根据设计的信号配时方案,设计红绿灯时间[15].针对上述交叉口,将路段单元、车种组成、交通流量和配时方案等各个参数输入到Vissim软件中,用Vissim软件的文件进行配置.使用评价中的延误功能,验证优化算法的准确性结果,对比分析如表7所示.
通过Vissim软件仿真评价的延误时间,可以看出仿真效果近似于优化算法的结果,由此证明了优化算法的可行性.
3 结语
交通畅通跟信号配时有很大的关系.本文采用延误、停车次数、通行能力三指标来进行单点交叉口信号配时方案的优化,以三者效用指标的最小为优化目标.计算结果表明,本文提出的信号配时优化方法使交叉口服务水平有所增强.同时对比以往研究,发现指标权重模型会影响到优化结果.即便现阶段采用的控制方案能缓解交通拥堵不断加剧的趋势,但从长期来看,仍需加强道路交通的管制,进一步引入大数据等分析手段,强化科技治堵,方能保障交通流稳定.
参考文献
[1]袁振洲. 城市交通管理与控制[M].北京:北京交通大学出版社,2013.
[2]罗霞,刘澜,刘海旭,等. 交通管理与控制案例集[M].北京:人民交通出版社,2016.
[3]张锐,姚恩建,杨扬. 多方式条件下城市交通分配研究[J].交通运输系统工程与信息,2014,14(6):107-112,170.
[4]杨娜,屈晓光,寇诗雅. 考虑拥挤交通流再分配的单点自组织信号控制方法[J].交通科技与经济,2016,18(5):38-42.
[5]关雅丽,刘小勇. 城市信控交叉口优化方法仿真研究[J].交通科技与经济,2015,17(4):39-42.
[6]刘刚,况爱武,郑慧敏. 考虑服务水平可靠度的单点交叉口信号配时研究[J].交通科技与经济,2017,19(2):39-43.
[7]杨晓光,李晓丹,谢峰,等. 单点交叉口信号配时优化方法及原型系统实现[J]. 智能建筑与城市信息,2012(12):92-96.
[8]全永燊. 城市交通控制[M]. 北京:人民交通出版社,1989.
[9]蒲琪,谭永朝,杨超. 交叉口信号配时优化模型研究[J].上海铁道大学学报,1999,20(4):31-34.
[10]Transportation research board. Highway capacity manual[M].Washington:National Research Council,2000.
[11]颜艳霞,李文权. 单点交叉口信号实时配时模型及蚂蚁算法[J].公路交通科技,2006,23(11):116-119,125.
[12]张凌煊. 拥挤网络交叉口多目标配时优化研究[D]. 成都:西南交通大学,2015.
[13]吕少姣,李春贵,李哲明. 基于混沌遗传算法的干道协调控制相位差优化[J]. 广西工学院学报,2013,24(1):44-49.
[14]姜阳,孔峰. 基于MATLAB遗传算法工具箱的控制系统设计仿真[J]. 广西工学院学报,2001,12(4):6-9.
[15]卢守峰,刘喜敏. 微观交通仿真[M].长沙:中南大学出版社,2016.
