基于红外图像特征匹配的图像处理系统*
2018-09-07,,
,,
(浙江清华长三角研究院 先进制造技术研究所,嘉兴 314000)
引 言
图像匹配算法是目标识别和人工智能的关键技术之一。近年来,随着此技术在各领域的应用需求不断增加,其已成为众多学者的重点研究对象。
根据匹配基本原理[1],图像匹配可分为三类[2]:基于灰度相关的图像匹配[3]、基于特征的图像匹配[4-6]和基于解释的图像匹配。基于灰度相关的匹配方法需要选取一定大小的窗口灰度阵列,一旦进入信息贫乏区域,匹配失败在所难免。基于解释的图像匹配需要建立图片自动判读的专家系统,不仅要有非常大的数据库支持,而且计算量庞大,相关的研究至今也尚未取得突破性的进展。而基于特征的匹配通过提取图片的一些特征后,再采用算法进行匹配。这样既避免了采用死板的固定灰度阵列,也降低了计算量,具有灵活性强、准确性高等优点。
本文以TI公司的TMS320C6000系列DSP(Digital Signal Processor)为核心,组建红外图像匹配系统。利用DSP计算速度快的特点,系统在匹配算法运行前加入图像预处理过程,减少了干扰影响,优化了匹配效果。
1 系统构成
1.1 系统描述
红外图像匹配系统前端配备的是国内公司自主研发的波长范围为8~14 μm的中红外波段热源检测器,输出14位有效数据。核心处理器采用TMS320DM648型号DSP,该款DSP许多特性可为在处理图像信号时提供很大的便捷性。最后,红外灰度图片经伪彩色算法着色后在液晶屏显示,并输出匹配结果。
1.2 系统硬件构成
红外图像匹配系统的硬件主要由三部分组成,分别是电源模块、DSP模块和FPGA模块。电源模块负责电路板所有设备的供电,除了电路板上的芯片,还包括外部设备接口处的供电。DSP模块负责数据处理,包括图像处理算法、通信数据处理等,是系统的核心。FPGA模块主要负责多种接口的转换、接口协议的实现等功能。系统中红外图片数据的输入输出都需要经过FPGA解码和编码。系统硬件结构如图1所示。
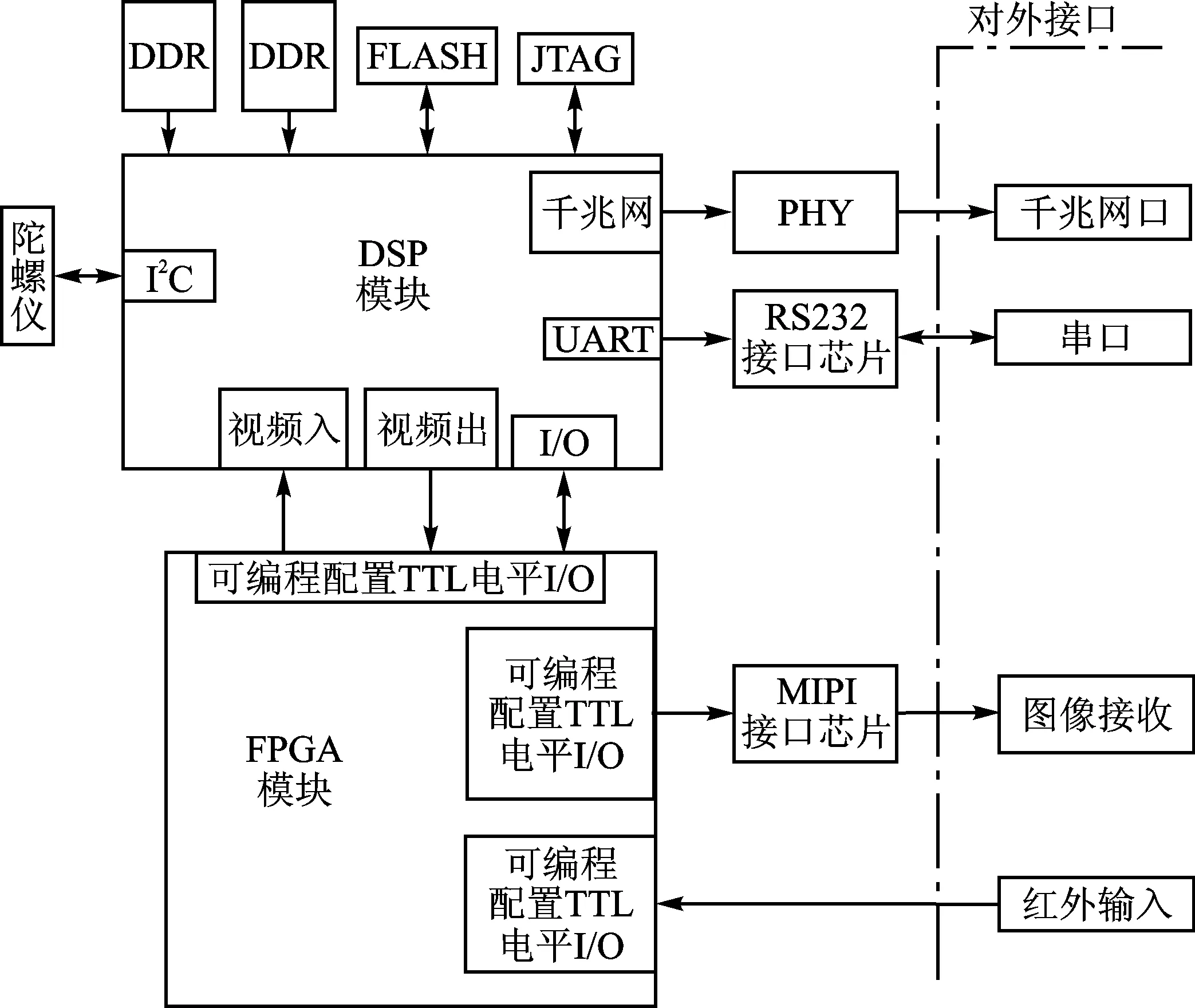
图1 系统硬件结构图
1.3 系统算法构成
1.3.1 图像预处理
红外传感器输出图像的尺寸为640×480,为了提高运算效率,缩短匹配时间,需要将原始图片尺寸缩小。但如果一味追求运算速度而把图片尺寸缩得过小,则会导致图片特征信息丢失,反而不利于正确匹配。因此权衡之后,选择图片的长宽分别缩小为原来的四分之一比较合适。其中,缩放算法采用近邻取样插值算法。
红外检测设备在运用于大型电厂或者变电场所时,由于室内室外有些检测位置的背景较为复杂,存在一些不可忽略的干扰因素,因此本文采用最大类间方差算法[7-8]去除背景干扰。
1.3.2 图像特征提取
图像特征提取分两步进行:第一步提取边缘信息,第二步提取图像共生矩阵。
红外图像输入DSP时即为灰度数据,故可直接采用Sobel算法[9]进行边缘提取。利用水平和垂直Sobel算子分别与图像作卷积运算:
(1)
其中D为图像数据矩阵,Gx为提取水平方向边缘的图片数据,Gy为提取垂直方向边缘的图片数据。图像的边缘强度为:
(2)
由于不同的图像边缘信息差异较大,G的取值范围变化也会很大,不利于后续图像特征提取,故将其归一化后,再映射到8位图像灰度值区间:
(3)
其中Gmin和Gmax分别是G的最小值和最大值。
灰度共生矩阵[10]是一种常用的纹理特征分析方法,它对图像每两个像素灰度级联合分布进行统计,能很好地体现纹理灰度级相关性的规律。灰度共生矩阵被定义为从灰度级i的点离开某个固定位置关系D=(Dx,Dy)达到灰度为j的概率。灰度共生矩阵用PD(i,j)(i,j=0,1,2,…,L-1)表示。其中L表示图像灰度级,i、j分别表示两个像素的灰度。共生矩阵生成的方向一般为0°、45°、90°、135°四个方向。由于红外图像信息偏少,为了增加匹配算法的鲁棒性,本文采用上述的全部4个方向的共生矩阵作为图像的特征向量。
P=[P0(i,j),P45(i,j),P90(i,j),P135(i,j)]
(i,j=0,1,2,…,L-1)
(4)
考虑DSP在处理中读写数据的速度问题,将式(4)转换为一维数组,则特征向量可表述为:
P(i)(i=0,1,2,…,4×L2-1)
(5)
1.3.3 图像匹配算法
图像的匹配过程实则是图像特征向量的匹配。本文采用曼哈顿距离算法[11]衡量未知图的特征向量PX(i)(i=0,1,2,…,4×L2-1)和图库的特征向量PR(i)(i=0,1,2,…,4×L2-1)的匹配程度,如式(6)所示:
(6)
由于不同图片提取的特征向量数值差异较大,在多个样本参与匹配时不利于获得正确的匹配结果。因此对传统曼哈顿距离算法作了改进,加入权重系数W,使不同的特征向量处于同一数量级。
(7)
在实际处理中,以图库图片的特征向量来计算权重系数,然后通过改进的曼哈顿距离计算公式得到图库图片与未知图片之间的一个匹配值,数值最小对应的图库图片则被判定为匹配结果。其中,改进后的距离称为加权距离,如式(8)所示:
(8)
由于采用全部4个方向(0°,45°,90°,135°)的共生矩阵作为图像的特征向量,故理论上灰度共生矩阵的总和Ptotal与图像像素尺寸大小(m×n)的关系如式(9)所示:
Ptotal=(m-1)·n+m·(n-1)
+(m-1)·(n-1)+(m-1)·(n-1)
(9)
本文图像通过尺寸调整后像素均为160×120,所以Ptotal=75 962。
由于预处理时去除了背景,所以实际参与灰度共生矩阵计算的有效像素有所减少,导致实际灰度共生矩阵总和也相应减小,则图像去除背景后的灰度共生矩阵有效占比率(L)为:
(10)
调整后的距离方程如式(11)所示,称其为有效距离。
DL=L·dW(PX,PR)
(11)
2 实验结果与分析
为了对所建系统的实时性、准确性和稳定性有效地评估,本文设计了4组匹配实验,每一组匹配实验的次数为30次,分别统计每组的消耗时间和匹配成功率,其中时间是通过高精度示波器检测硬件I/O高低状态变换测得,如表1所列。
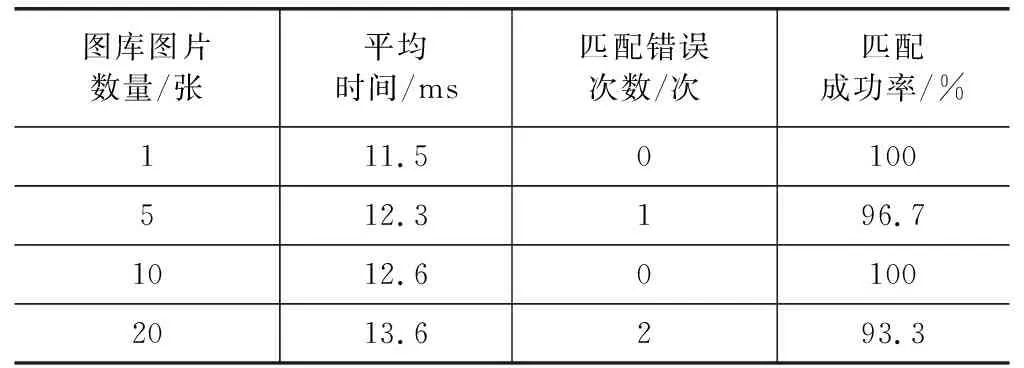
表1 匹配不同图库的时间和成功率
实验中,虽然随着图库图片数量增加,匹配消耗的时间也增加,但增加的幅度比较小,而且匹配所耗时间整体都是远远小于红外图片更新时间40 ms(每秒25帧)。匹配的准确率与图库图片有一定关系,如果图库中存在特征比较接近的图片,则系统可能会匹配错误。整体上,系统的匹配效率、准确率等方面符合要求。
结 语

赵飞(硕士研究生),主要研究方向为图像识别。
