GW16型隔离开关热稳定性仿真分析
2018-09-07李付永姚灿江时彦文赵维全
李付永, 姚灿江, 张 任, 时彦文, 赵维全, 李 伟
(河南平高电气股份有限公司,河南 平顶山 467000)
0 引言
GW16是属于单臂伸缩式隔离开关,其具有载流能力大、占地面积小、结构紧凑和运动部分密封良好等优点。随着国家逐渐采用高压、特高压等输电方式,GW16型隔离开关作为主要高压产品之一,且长期运行在环境条件恶劣的户外,由于接触电阻的存在,其会产生一定的温升,当温度升高到临界值时,会加速设备老化,使隔离开关发生故障次数急剧升高,从而影响其可靠性。
通常情况下,高压设备中接触区域电阻最大,造成接触区域温度升高最快,严重时会使两接触面发生熔焊,这是导致隔离开关发生故障的主要原因。针对隔离开关接触发热问题,国内外学者进行了大量相关研究,文献[1]对GW5-110型隔离开关触头发热缺陷进行分析及检修处理;文献[2]针对GW5-126型隔离开关触头烧损故障进行分析及提出相应措施;文献[3]针对隔离开关触头结构和发热原因进行分析,提出防止隔离开关过热故障的措施;文献[4]通过户外高压隔离开关电触头温升机理研究,得出了影响电触头温度的主要因素。以上研究学者仅对隔离开关接触区域烧损和发热故障进行相关分析,但无法确定隔离开关在运行过程接触区域的温度变化情况,因此,利用有限元研究隔离开关的热稳定性,不仅可以明确其接触位置的温度分布情况,而且还可以提高其使用寿命,避免高压设备的非计划停运,提高电网运行的可靠性。
1 隔离开关数学模型的建立
GW16 型隔离开关是供高压线路在无载流情况下进行切换和对被检修的高压母线及其他电气设备进行明显隔离的三极户外高压电器,该型隔离开关的动静接触装置是单柱垂直断口式,其主要在上下导电管内部进行传动,受外界环境影响因素较小,在导电管内部,由于平衡弹簧的作用,抵消了相关动力组件的重力矩,因而致使其分、合闸动作平稳可靠[5]。本文以GW16型高压隔离开关为例,其主导电结构图如图1所示。
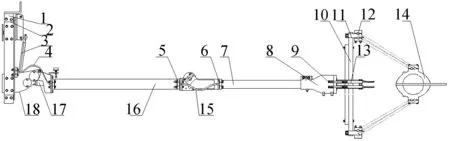
图1 GW16型高压隔离开关主导电结构图
通常情况下,GW16型高压隔离开关动静触头接触示意图如图2所示,其接触装置的相关结构满足Hertz公式的条件,可通过相应的数学运算得到接触半径r与深度h之间的关系,如下所示[6,7]。
(1)
(2)
式中:F为接触力;E为接触系统材料的杨氏模量;υ为接触系统材料的泊松比;R1、R2为动静接触件的半径。

图2 GW16型高压隔离开关动静触头接触示意图
在自然界中,热传递主要包括热传导、对流和辐射3种形式,GW16型高压隔离开关也不例外,在其实际运行过程中,通常以两种或3种热传递形式向外散热。对于其动静接触触头而言,由于接触电阻的存在,动静触头产生热量,并主要通过金属连接件表面利用对流的方式向外散热,根据热传递的相关理论,GW16型高压隔离开关动静触头传热数学模型如下所示[8,9]。

(3)
{L}TδT([D]{L}T)dV=

(4)

2 隔离开关热电耦合仿真
2.1 隔离开关三维模型的建立
由于ANSYS的三维建模能力存在一定的局限性,本文主要采用NX来建立GW16型高压隔离开关动静接触系统的三维实体模型。在建模之初,为了实现计算的便捷性,对动静接触系统模型进行合理的简化,去除对分析结果影响较小的结构,简化后的动静接触系统模型如图3所示。

图3 GW16型高压隔离开关动静接触系统三维模型
2.2 隔离开关动静接触系统热电耦合温升仿真
耦合场分析指在一个分析过程包含有多个物理场相互耦合作用的分析类型,耦合场分析应用范围十分广泛,如研究感应加热的磁—热耦合分析、研究压力容器的热—应力分析、研究磁体成型的磁—结构分析、研究导体发热的电—热分析等。由于GW16型隔离开关是交流高压电器,而ANSYS Workbench中的Electric模块无法对交流传导场进行分析,且GW16型高压隔离开关动静接触系统温度场分析需要保留模型的几何特征以便于明确温度分布情况,且施加载荷和边界条件相对复杂。另外,为了同时保证分析的多样性,因此选择Maxwell与ANSYS Workbench联合计算的间接分析模式[9,10]。
2.2.1 前处理
首先在Maxwell中对GW16型高压隔离开关动静接触系统进行交流传导场分析,确定其接触系统Joule Heat,然后利用软件间的无缝借口导入ANSYS Workbench中的Steady-State Thermal和Transient Thermal模块,设置相应的初始条件,依次进行稳态和瞬态热分析。
对于稳态和瞬态热分析而言,仅仅是加载条件和求解及相应后处理存在一定的不同。通过稳态热分析可以求解得到接触系统在温度趋于稳定情况下,其温度分布情况;而瞬态热分析获知接触系统在大电流和瞬时状态下,最高温度随时间的变化情况。
2.2.2 网格划分
由于GW16型高压隔离开关动静接触系统结构相对简单,在设置选用体扫描法加边角控制函数法对其进行网格划分。为保证仿真的精度和准确性,在动静触头的接触区域,进行了局部加密,共生成25 248个网格,45 429个节点。网格划分如图4所示。

图4 GW16型高压隔离开关动静接触系统网格划分图
2.2.3 施加载荷和边界条件
在稳态热分析中,对GW16型高压隔离开关动静接触系统加载额定电流3 150 A的1.1倍,在瞬态热分析过程中,对其加载短路电流为60 000 A,加载时间为3 s。为了保障施加电流的流向,将高压隔离开关动静接触系统中的动触头施加电压耦合和电流边界条件,同时将静触头末端面电压设置为0。
经查文献[9,10]可知,隔离开关的有限元仿真分析是在封闭常温的环境下进行的,对流是主要的热传导方式,在此种状态下,空气的对流换热系数范围为5~10 W/(m·K),环境温度为15 ℃左右。
2.2.4 仿真结果分析
GW16型高压隔离开关在通流3 465 A电流稳态运行时,其动静触头稳态仿真的温度场如图5所示。
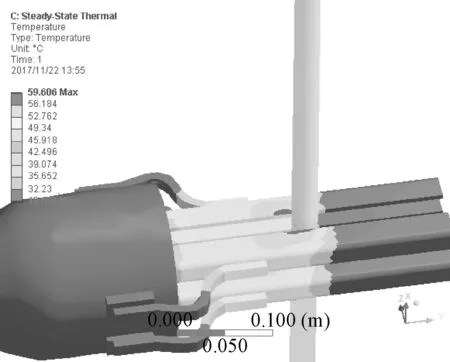
图5 GW16型高压隔离开关动静触头温度场分布图
由图5可知,GW16型高压隔离开关动静触头接触区域的温度最高,从该接触区域到上导电管和静触杆末端温度逐步降低,其主要原因是因为电流流经接触区时,横截面积变小,电流密度增大,从而导致动静触头接触区域产生大量的焦耳热,而本次稳态仿真的最高温度为59.606 ℃,其小于GW16型高压隔离开关最大允许温升。
2.2.5 接触系统瞬态热仿真分析
GW16型高压隔离开关在运行过程中,可能会受到瞬时大电流冲击,因此,为了确定其在冲击下是否具备保持正常工作的能力,所以对其动静接触触头进行瞬态热分析。
通过设置边界条件和载荷,得到GW16型高压隔离开关动静接触触头在通流60 000 A,时间为3 s的条件下,温度场分布图如图6所示。

图6 GW16型高压隔离开关动静触头瞬态温度场分布图
从图6可知,动静接触系统温升最大,通过对其温升最高点温度变化情况的监测得到其温度随时间的变化曲线如图7所示。
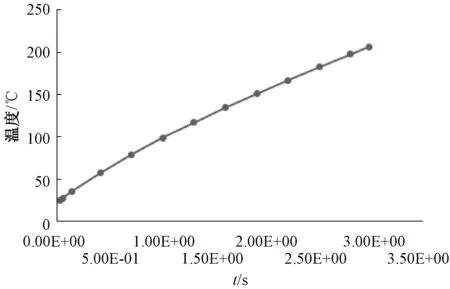
图7 GW16型高压隔离开关动静接触温升最高点温度变化曲线图
从图6和图7可知,其接触区域最高温度为206.97 ℃,该温度值小于动静接触触头材料熔点,不会发生熔焊。因此,GW16型高压隔离开关在瞬时大电流冲击下,仍可以正常工作。
3 隔离开关温升试验对比分析
为了验证有限元仿真结果的真伪性,对GW16型高压隔离开关进行温升试验,试验设置如图8所示,其温升测量点如图9所示。试验条件如下:电流3 465 A,风速小于0.5 m/s。环境温度为15 ℃,试验稳定条件为:在4小时内1和2测量点温升小于80 K,3、4和5测试点温升小于65 K[10]。通过试验得到各测量点的温升与仿真结果如表1所示。
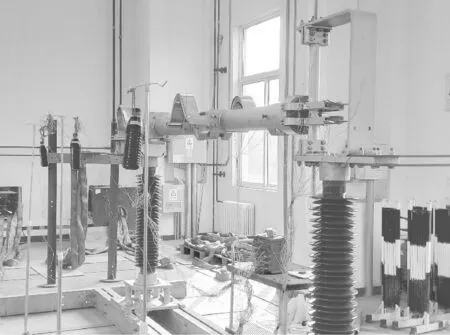
图8 GW16型高压隔离开关现场温升试验图
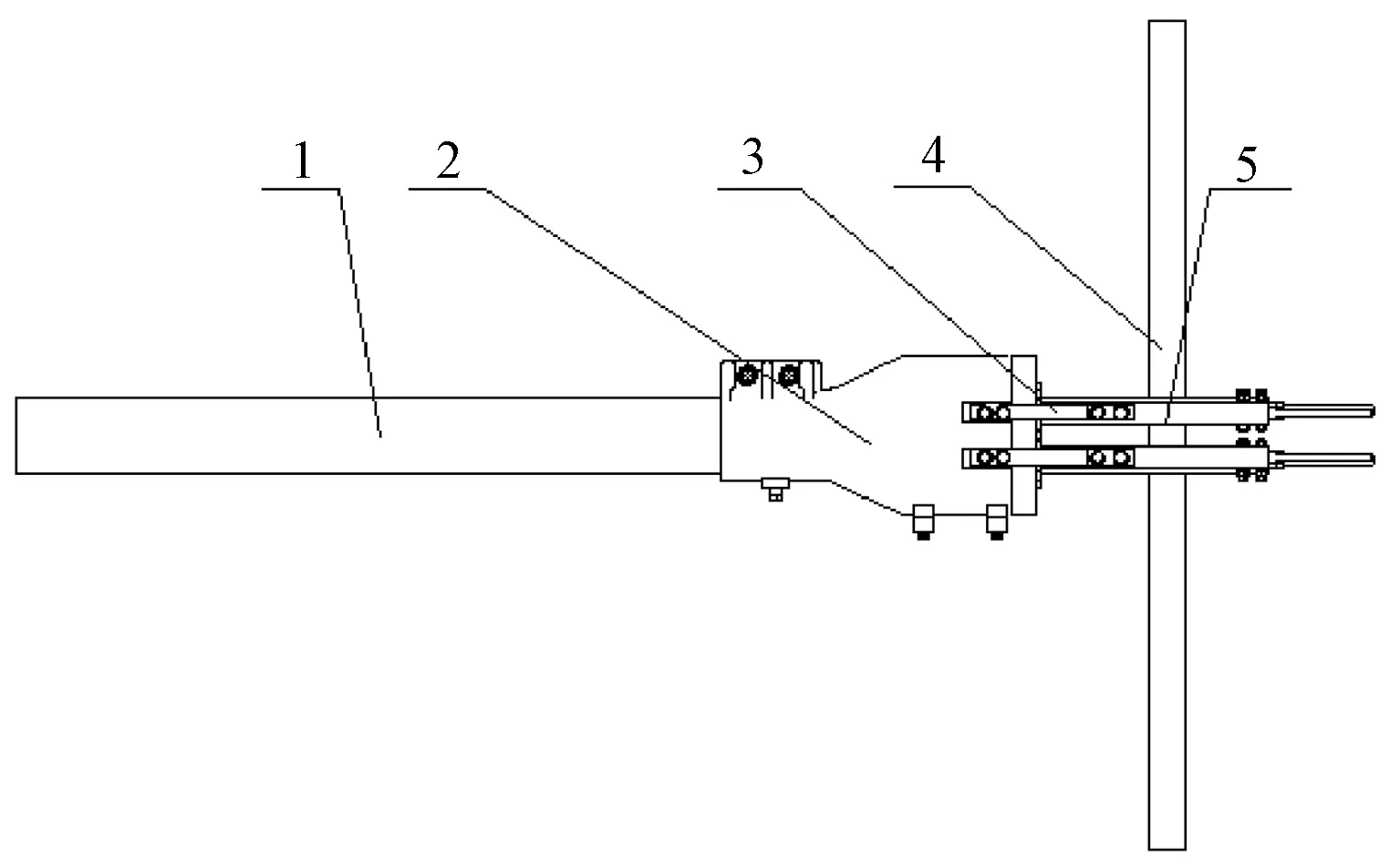
图9 GW16型高压隔离开关温升测量点布置图

测试点编号仿真结果/℃试验值/℃131.80932.8232.2334.1342.49643.6456.10458.2559.60662.4
通过仿真结果与试验数据对比分析可知,试验结果与仿真值存在一定的误差,分析其主要原因如下:
(1)采用有限元分析方法进行稳态热分析过程中,仅考虑对流这一种热传递方式,且无法确定对流换热系数的准确值,只能以理想值来代替,从而引入了一定的误差。
(2)由于有限元仿真前处理过程中,对模型存在一定程度的简化,导致动静触头接触截面积比实际情况大,从而致使接触区域温升较低。
(3)在实际试验过程中,由于外界环境因素的影响,一些灰尘或杂质进行动静接触系统,首先使动静触头不能有效接触,在一定程度上增大了接触电阻;其次在触头与外界环境之间形成热阻层,使动静触头与外界环境的热传递性能下降,最终导致温升较大,与仿真结果存在一定的误差。
通过仿真分析结果与试验数据二者比较发现,两者之间的误差在5%以内,满足精度要求,同时也验证了有限元仿真计算的准确性。
4 结论
(1)利用Maxwell和ANSYS Workbench两者联合对GW16型高压隔离开关进行稳态和瞬态热分析,与通过试验得到的结果基本一致,表明在实际工程中使用ANSYS Workbench有限元仿真分析的结果是可信的。
(2)有限元仿真分析方法可以更加清晰直观地了解GW16型高压隔离开关动静接触系统在实际工作过程中实际温升情况,明确温度分布区域。为优化其接触系统结构、合理规划温度分布以及可靠性设计提供了一种重要的途径。