爬行搜救机器人
2018-09-06朱崇恺
知识就是力量 2018年9期
朱崇恺
在澳大利亚布里斯班举行的2018年IEEE国际机器人与自动化会议上,以色列内盖夫本-古里安大学的扎鲁克(David Zarrouk)博士展示了一个名为“后起之秀”的机器人(Rising STAR or RSTAR)。這是扎鲁克蔓生系列机器人中的最新产品,旨在克服各种地形障碍,同时最大限度地降低运输成本。在这里,“蔓生”指的是机器人的轮子装在腿上,而腿从身体向下及外侧倾斜,其角度可以调节。同时机器人可以在圆形或模仿脚步的叶片型轮子之间自由切换。这都赋予了RSTAR额外的自由度,因为它的身体能够改变其相对于轮子的位置,从而改变机器人的质心。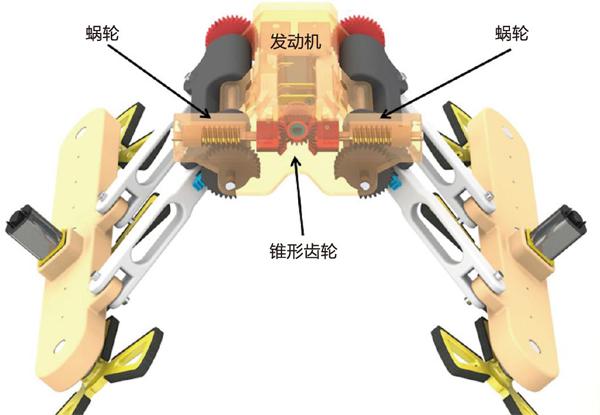
这似乎是一个简单的改变,但它可以实现一系列新的行为—RSTAR使用圆形轮子在坚硬平面上能以每秒3英尺的速度行进,切换用腿则可以穿过极其柔软或颗粒状的表面—如厚泥浆或沙子—而不会被卡住。在缝隙中,它也可以通过将轮子压到墙壁从而实现垂直爬行。“RSTAR是非结构化环境中搜索和救援行动的理想选择,例如在倒塌的建筑物或水淹地区,它都能够适应并克服各种连续障碍到达目标,”扎鲁克总结说。