变幅运动和起重量对塔式起重机起重臂振动的影响规律
2018-09-05董明晓梁立为韩松君杨传宁
董明晓,张 恩,梁立为,韩松君,杨传宁
(山东建筑大学 机电工程学院,济南 250101)
塔式起重机是通过变幅机构的运动来完成货物运输工作过程,生产厂家为了提高起重机的工作效率,而不断地提高起重机的额定运行速度和额定起重量.随着这一参数的增加,机构的运动可能引起起重机结构更大的振动,振动产生的交变载荷降低了起重机的性能.目前,国内外学者对起重机结构振动进行了大量研究.Vlada等[1]采用有限元方法将货物等效为移动共振器,分析了桥式起重机的动态响应;Jaafar等[2]基于Lagrange方程建立了门式起重机的非线性动力学方程,仿真分析了小车的运动特性和货物的摆动特性;周磊[3]基于Euler-Bernoulli梁理论,分析了变幅小车位置对耦合振动系统固有频率的影响规律;李心爽等[4]计算分析货物和桥式起重机耦合振动系统的前3阶固有频率和动态响应.本文以小起升高度或附着式结构的塔式起重机为研究对象,将起重机等效为悬臂梁,货物、吊钩和变幅小车等效为移动质量,从而构成了移动质量-悬臂梁系统,研究起重机变幅运动和起重量对起重臂振动特性的影响规律.
1 货物-起重臂系统振动微分方程
对于小起升高度或附着式结构的塔式起重机,塔身在外界干扰和货物重力的作用下,产生的弯曲变形和扭转变形相对于起重臂的弯曲变形较小,根据塔式起重机振动模态分析,变幅运动和起升运动主要激励起重臂在铅垂面内振动[5].本文是研究变幅小车在运输货物过程中对起重臂振动特性的影响规律.因此,本文忽略塔身的变形,将起重机等效为悬臂梁,货物、吊钩和变幅小车等效为移动质量,从而构成了移动质量-悬臂梁系统,如图1所示.以悬臂梁轴线方向为x轴,以垂直于悬臂梁轴线的方向为y轴,以悬臂梁的固定端点为坐标原点,建立xOy直角坐标系,ma为移动质量的质量,v为移动质量的速度,xa为移动质量在悬臂梁上的位置,L为悬臂梁的长度,E为悬臂梁的弹性模量,Ih为悬臂梁截面的等效惯性矩,m为悬臂梁的单位长度质量,在t时刻悬臂梁上x处的挠度为y(x,t).
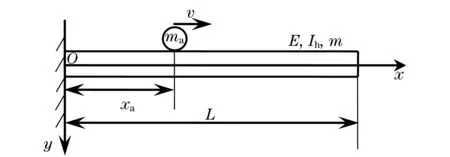
图1 移动质量-悬臂梁系统示意图Fig.1 Schematic diagram of the moving mass and cantilever beam system
基于Euler-Bernoulli梁理论,不计梁的横向剪切变形的影响和阻尼的作用,在外力F(x,t)的作用下,梁的振动微分方程[6]为
(1)
由于移动质量沿着悬臂梁运动的同时,也随着悬臂梁上下振动,所以在动力学方程中应考虑移动质量的惯性力.移动质量对悬臂梁的作用力F(x,t)为
(2)
将式(2)代入式(1)中,得
(3)
移动质量在x处沿着y方向的振动速度为
(4)
从式(4)中可以看出:右边第1项为移动质量沿着悬臂梁运动的速度在y方向上的分量;第2项为移动质量随着悬臂梁上下振动的速度.
对式(4)进一步求导,可得移动质量在x处沿着y方向的振动加速度,即
(5)
从式(5)中可以看出:右边的第1项为移动质量沿着悬臂梁运动的加速度在y方向上的分量;第2项为移动质量随着悬臂梁上下振动在y方向上的加速度;第3项为移动质量在随着悬臂梁上下振动产生的离心加速度;第4项为移动质量在随着悬臂梁上下振动的同时沿着悬臂梁运动产生的科氏加速度.如果移动质量为匀速运动,则第1项为零.
将式(5)带入式(3)中,将式(3)化为
(6)
由于悬臂梁的振动挠度y(x,t)对时间和空间是分离的,所以对式(6)采用分离变量法求解[7],令
(7)
式中:φi(t)为悬臂梁第i阶振型函数;qi(t)为悬臂梁第i阶模态坐标函数.
将式(7)带入式(6)中,得
(8)
式中:用撇表示φi(x)对x求导;用点表示qi(t)对时间t求导.

(9)
式(9)为移动质量-悬臂梁系统的振动微分方程,将式(9)写成矩阵的形式,即
(10)

本文利用Matlab通过式(10)计算出每一阶振动的模态坐标qi(t),将求得的每一阶模态坐标qi(t)和每一阶悬臂梁振型函数φi(x)代入式(7)中,可得到任意时刻悬臂梁上任意一点的挠度y(x,t).
2 起重臂截面惯性矩的等效
塔式起重机是由塔身、起重臂、平衡臂和底架等结构组成,属于格构式结构.格构式结构的构件数量较多,并且连接处的结构复杂,起重臂的截面惯性矩难以计算.因此,本文将格构式起重臂结构等效为实腹式结构,计算起重臂截面的等效惯性矩.
将复杂的格构式结构等效为实腹式结构,通常是由实腹式结构的欧拉临界力方程进行等效.等效方法有2种:① 利用格构式结构某个截面的惯性矩,求解格构式结构的等效长度;② 在保证结构整体几何尺寸不变的情况下,计算结构的等效惯性矩.第1种方法改变了结构的整体尺寸,适用于一个构件的计算分析,不适用于多个构件组合结构的计算分析.因此,本文采用等效惯性矩的方法将格构式结构等效为实腹式结构.
由文献[8]可知,一般采用等效长细比的方法来计算等效惯性矩,将等效惯性矩表示为
(11)
式中:λh为等效长细比;μ为长度系数;A为构件横截面所截各弦杆毛面积之和.
塔式起重机的起重臂结构如图2所示,起重臂的横截面如图3所示.h为上弦杆中心线到下弦杆中心线的垂直距离,b为两个下弦杆中心线之间的距离,h2下弦杆的高度,b2下弦杆的宽度.
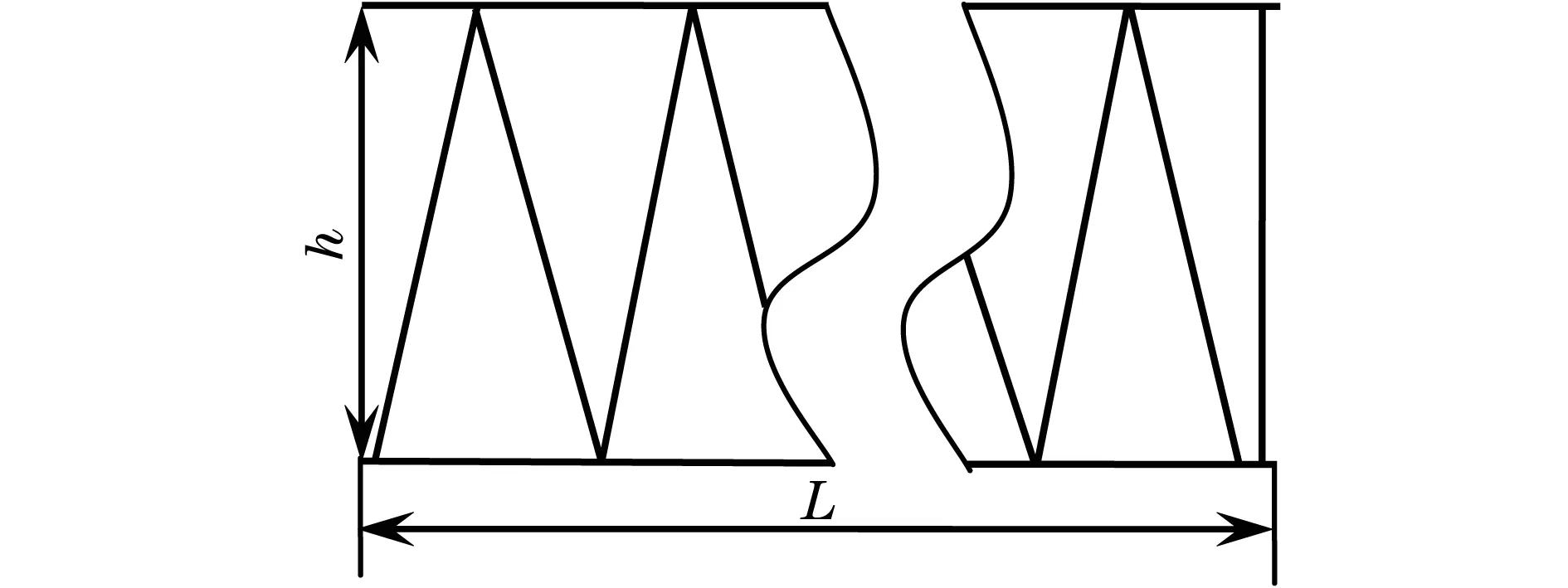
图2 塔式起重机起重臂结构示意图Fig.2 Schematic diagram of the structure of the tower crane jib
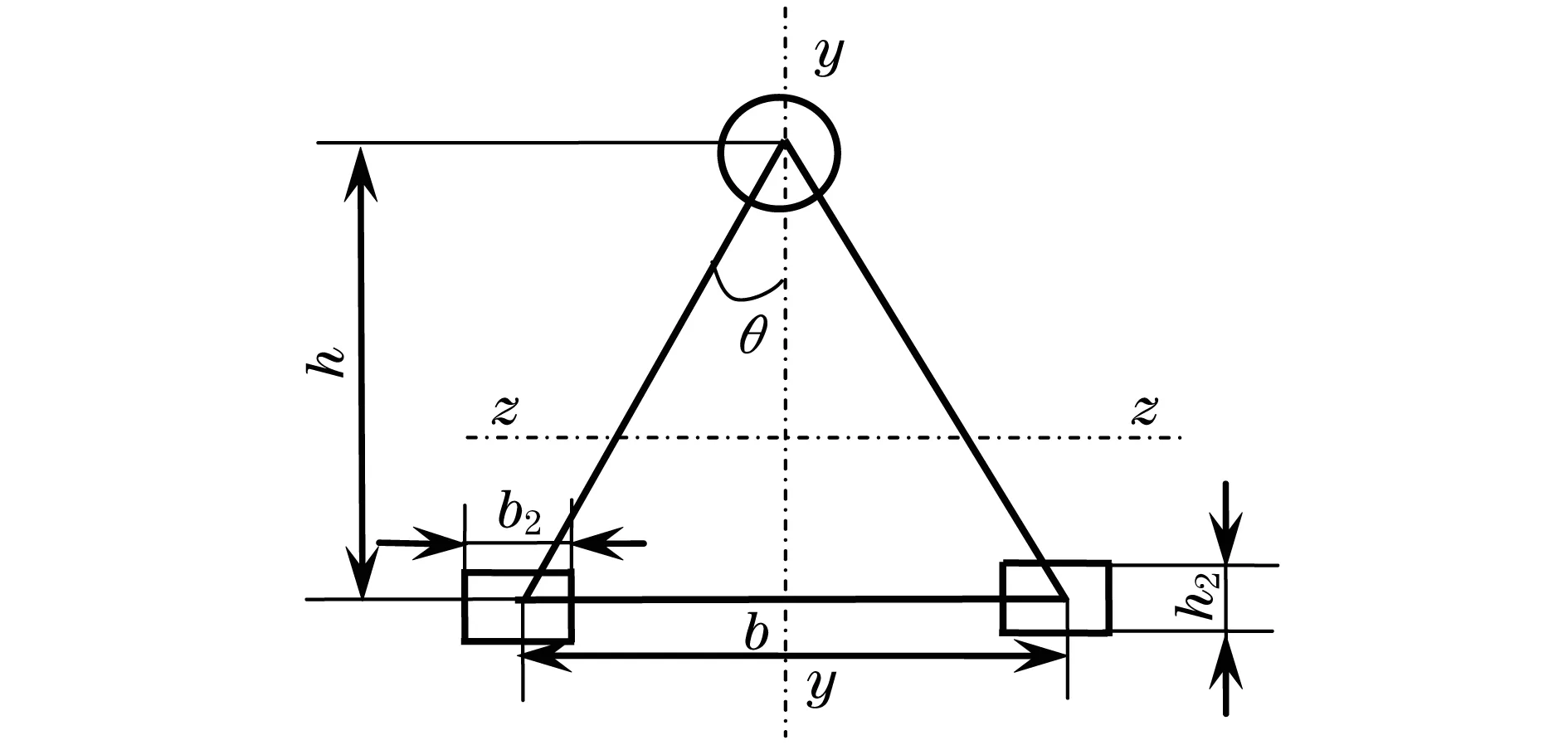
图3 塔式起重机起重臂横截面示意图Fig.3 Schematic diagram of the cross section of the tower crane jib
由于起重臂为三肢格构式结构,三肢格构式结构对z-z轴的等效长细比[8]为
(12)
式中:λ为长细比;A1为横截面所截各腹杆的面积之和;θ为腹杆所在平面与y轴的夹角.
将式(12)代入式(11)中,得横截面对z-z轴的等效惯性矩为
(13)
式中:I为各弦杆横截面对z-z轴的惯性矩之和.
将塔式起重机的起重臂参数代入式(13)中,可求得格构式起重臂结构的等效惯性矩.
3 变幅运动对起重臂振动特性的影响
为了研究塔式起重机运行机构的动力学特性,课题组将TCICES1.0型号的塔式起重机以1∶6的比例,设计制造了塔式起重机实验台.实验台采用Q345号钢制造,弹性模量为2×1011Pa,起重臂长度为3.6 m,单位长度质量为11 kg/m,货物质量为10 kg.
据式(13)计算起重臂截面对z-z轴的等效惯性矩为8.776×10-6m4;然后根据式(7)仿真计算变幅机构的运动速度分别为0.5,1.0和2.0 m/s时起重臂端点的振动特性,振动曲线如图4所示.
由图4可知,变幅速度分别为0.5,1.0和2.0 m/s时,起重臂端点振动的曲线均趋向于一条曲线,因此,变幅速度对起重臂端点振动挠度的影响很小.
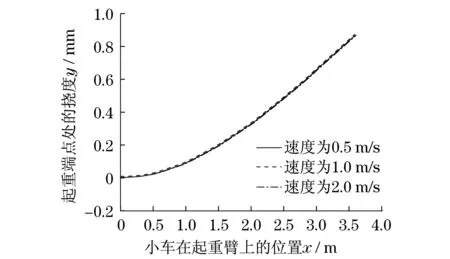
图4 在不同变幅速度情况下起重臂 端点的振动曲线Fig.4 The vibration curve of the jib’s top with different moving speed
为了研究变幅速度对起重臂端点振动的振幅和频率的影响规律,将图4局部放大,图5(a)表示变幅小车以不同的速度运动到起重臂0.200~0.206 m区间内,起重臂端点振动情况.从图5(a)中可以计算出:变幅速度为0.5 m/s时,起重臂端点振动周期为0.003 23 s,振幅为1.39×10-7m;变幅速度为1.0 m/s时,起重臂端点振动周期为0.003 28 s,振幅为0.70×10-7m;变幅速度为2.0 m/s时,起重臂端点振动周期为0.003 3 s,振幅为0.60×10-7m.因此,随着变幅速度的增大,起重臂端点处的振幅越来越小,振动周期越来越大.
为了研究变幅小车的运动位置对起重臂端点的振动幅值和频率的影响规律,将图4中变幅小车运动到起重臂1.800~1.806 m和3.500~3.506 m区间内的图像局部放大,如图5(b)和图5(c)所示.通过计算比较图5(b)和图5(c),货物以0.5 m/s的速度运动到起重臂1.800~1.806 m区间内,起重臂端点振动周期为0.003 3 s,振幅为4.8×10-7m;货物以相同速度运动到起重臂3.500~3.506 m区间内,起重臂端点振动周期为0.003 6 s,振幅为2.9×10-7m.因此,当变幅小车以恒定速度运动时,起重臂端点处的振动周期越来越大,振幅先增大后减小.

图5 在不同变幅速度情况下起重臂 端点的振动曲线放大图Fig.5 Enlargement of vibration curve of the jib’s top with different moving speed
4 起重量对起重臂振动特性的影响
为了研究起重量对起重臂端点振动特性的影响规律,分别仿真计算了在变幅小车以1.0 m/s的速度运输10,20和30 kg的货物的情况下,起重臂端点的振动响应,仿真曲线如图6所示(其他参数同图3).由图6可以计算出:10 kg的货物匀速运动到起重臂端点时,起重臂端点振动的挠度为0.867×10-3m;20 kg的货物引起起重臂端点振动的挠度为1.734×10-3m;30 kg的货物引起起重臂端点振动的挠度为2.601×10-3m.因此,随着起重量的增大,起重臂端点振动的挠度越来越大.
为了研究起重量对起重臂端点振动幅值和频率的影响规律,将图6在0.200~0.216 m区间内的图像局部放大,如图7所示.由图7可以计算出:10 kg的货物匀速运动到起重臂0.200~0.216 m区间内,起重臂端点的振动周期为0.003 28 s,振幅为0.7×10-7m;20 kg的货物引起起重臂端点振动的周期为0.003 45 s,振幅为0.75×10-7m;30 kg的货物引起起重臂端点振动的周期为0.0036 0 s,振幅为1.4×10-7m.因此,随着起重量的增大,起重臂端点振动的周期越来越大,振幅越来越大.
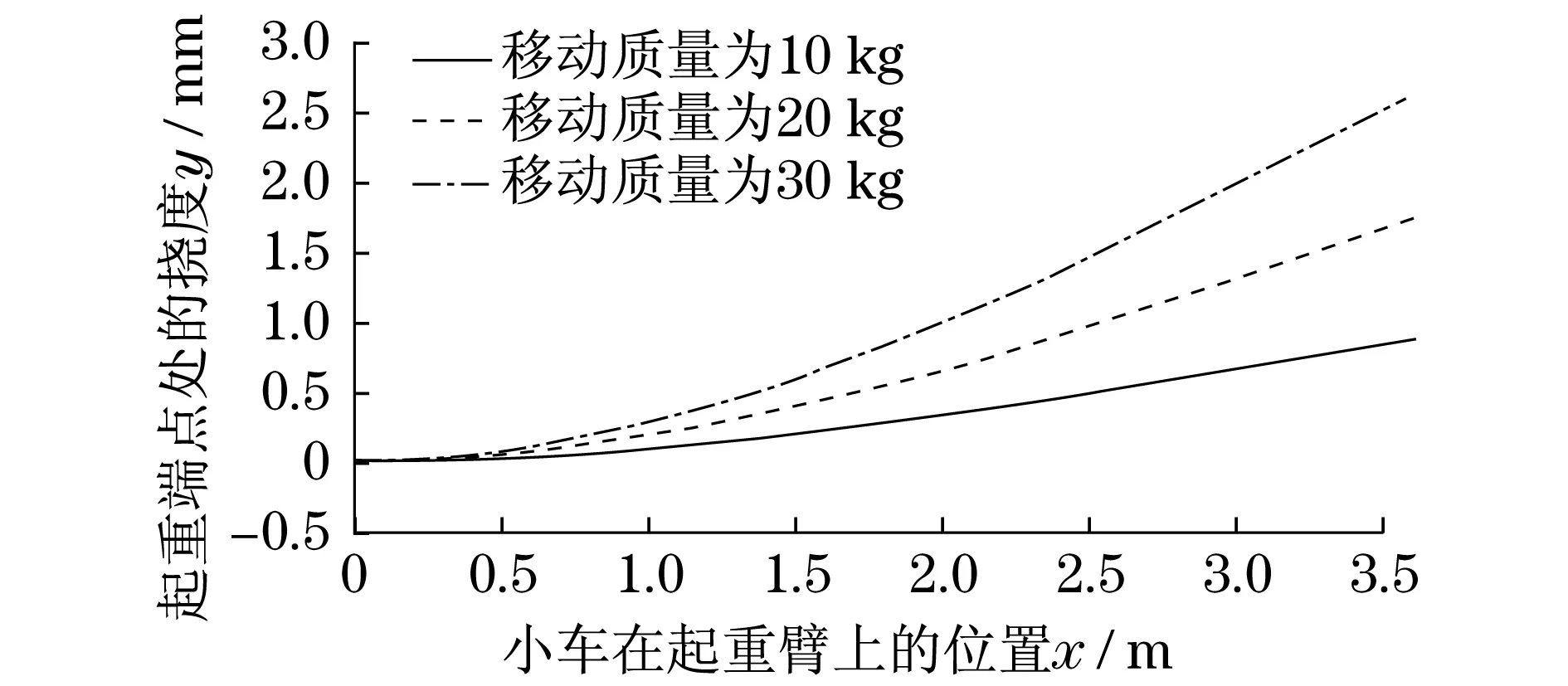
图6 在不同起重量的情况下起重臂端点的振动曲线Fig.6 The vibration curve of the jib’s top with different payload
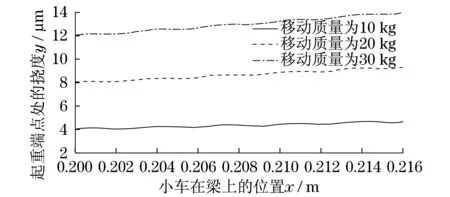
图7 在不同起重量的情况下起重臂 端点的振动曲线放大图Fig.7 Enlargement of vibration curve of the jib’s top with different payload
5 结论
将小起升高度或附着式塔式起重机等效为建立移动质量-悬臂梁系统,基于Euler-Bernoulli梁理论建立塔式起重机振动微分方程,通过仿真研究变幅运动和起重量对起重臂端点振动特性的影响规律.仿真计算结果表明:随着变幅速度的增大,起重臂端点处的振幅变小,振动周期变大,对起重臂端点的挠度影响很小;变幅小车以恒定速度运动时,起重臂端点的振动周期变大,振动幅值先增大后减小;起重臂端点振动的挠度、振幅和振动的周期随起重量的增大而变大.
