航空遥感灾害应急区域协同优化研究
2018-09-04房成法
陈 凯, 房成法, 李 儒
(中国科学院遥感与数字地球研究所航空遥感中心,北京 100094)
0 引言
在我国自然灾害频发,全国70%以上的城市和50%以上的人口都分布在气象、地震、地质和海洋等自然灾害严重的地区[1]。灾害发生后最急迫的是灾区救援,应用航空遥感技术可以大范围、高精度、快速获取灾区地面影像,对灾情评估、制定救灾方案等工作提供重要依据,因此航空遥感技术历来是灾害应急监测的首选[2-4]。航空遥感应急是指当灾害发生时,航空平台携带遥感设备在最短的时间内抵达灾区空域,快速获取和处理灾区地理影像数据的过程[5-6]。近年来,虽然无人机也得到了飞速发展,但由于其载荷较小、续航时间有限,还无法满足重大灾害应急监测的需要,本文重点针对有人驾驶的航空平台进行研究。
20世纪60年代,美国已将航空遥感广泛应用于灾害监测方面,并逐渐建立了国家、州政府和企业3个层级的航空遥感应急体系; 随后,欧洲也建立了以欧盟为主导和成员国参与的航空遥感体系,在灾害应急和地质调查方面共享协作; 作为发展中国家,巴西也很重视航空遥感在环境和灾害方面的应用,建立了著名的“保卫亚马逊”计划[7-8]。我国航空遥感事业起步于20世纪50年代,在国土测绘、资源调查和灾害应急监测等方面应用广泛。2008年汶川地震,曾先后有多个部门10余架遥感飞机参与灾情遥感监测[9]; 2010年青海玉树7.1级地震,某部门遥感飞机当日下午便飞达震区,成功获取0.33 m高空间分辨率图像6 T数据量[10]; 目前,国家级工程“航空遥感系统”正在建设之中。
但是,当前我国航空遥感在灾害应急组织方面仍存在2方面的突出问题: ①效率低,涉及飞机载荷耦合和空域审批等诸多环节,导致应急反应时间滞后,有时救援工作已经展开,却没有灾区实时航空遥感影像为救灾提供支持; ②组织混乱,在救灾期间,灾区空域聚集大量的遥感飞机(包括不满足遥感应急需求的飞行平台),使有限的空域异常繁忙,既浪费资源,又容易造成航空安全事故[11-14]。如何保障在组织有序的应急模式下,充分利用有限的航空遥感资源,减少应急反应时间,提高应急效率才是科学的航空遥感应急组织机制。
1 航空遥感区域协同应急模式
1.1 定义
结合我国航空遥感发展现状,本文提出航空遥感区域协同应急组织模式。该模式是空域管理部门通过对灾害所在区域及邻近区域正在实施航空遥感作业的飞机或者航空遥感资源进行择优,选择最为适合的遥感飞机承担应急监测飞行任务。
该模式的优势为: ①空域管理部门作为航空遥感应急飞行的组织者,不仅可以减少审批环节,还能够协调诸多飞行保障单元; ②应急响应时间短,在灾区及附近空域的遥感飞机可用最短时间到达灾区; ③航空平台、遥感设备、机组与技术人员相当于待命状态,不存在机载调试和耦合等问题。
1.2 可行性分析
区域协同应急模式的可行性从3个方面分析:
1)资源条件。近年来,开展航空遥感飞行的机构(测绘部门、公司和科研院所等)数量增长迅速并且遍及全国; 并且据不完全统计,全国各省市几乎每年都有不同种类的遥感测绘需求,也就是说在任意时段某地或与其相邻地区的空域都可能有航空遥感作业在开展。
2)组织条件。2018年国务院成立国家应急管理部,从国家层面整合优化全国应急力量和资源。应急管理部负责组织灾害救助体系建设,指导安全生产类、自然灾害类应急救援,承担国家应对特别重大灾害指挥部工作; 我国空域由空域管理部门负责统一指挥管理,各区域空域管理部门完全掌握辖区内遥感飞机的飞行与分布情况。因此,在区域协同应急模式中,国家应急管理部作为顶层组织者负责组织灾害应急队伍; 空域管理部门负责组织航空遥感应急监测飞行。两者的权责分工是区域协同应急模式能够开展实施的关键。
3)参与条件。自汶川地震发生之后,考虑对国家灾害救援工作的支持,增加行业的影响度,近年全国各类别航空遥感机构主动参与灾害应急工作,参与者的数量之多与积极性都达到空前水平。但是各机构的特长、能力、经验各不相同,一旦有应急灾情时,具备参与救灾的调度条件及优化可能性也有差别。所以参与条件是救灾指挥部门有效、快速组织精干救灾队伍需要严格把控的重要依据。
1.3 实施流程
区域协同应急模式的组织框架拥有3个层级: 第1层级为应急启动者,即国家应急管理部,负责统筹应急指挥的全面工作,既可调动多方资源,又负责统一发布信息; 第2层级为遥感应急组织者,即空域及应急队伍管理部门,负责协调、优化配置灾区附近航空遥感应急资源,组织遥感数据处理和遥感影像成果上报工作; 第3层级为遥感应急实施者,泛指遥感飞机,负责执行航空遥感应急飞行任务。航空遥感区域协同应急实施流程如图1所示。
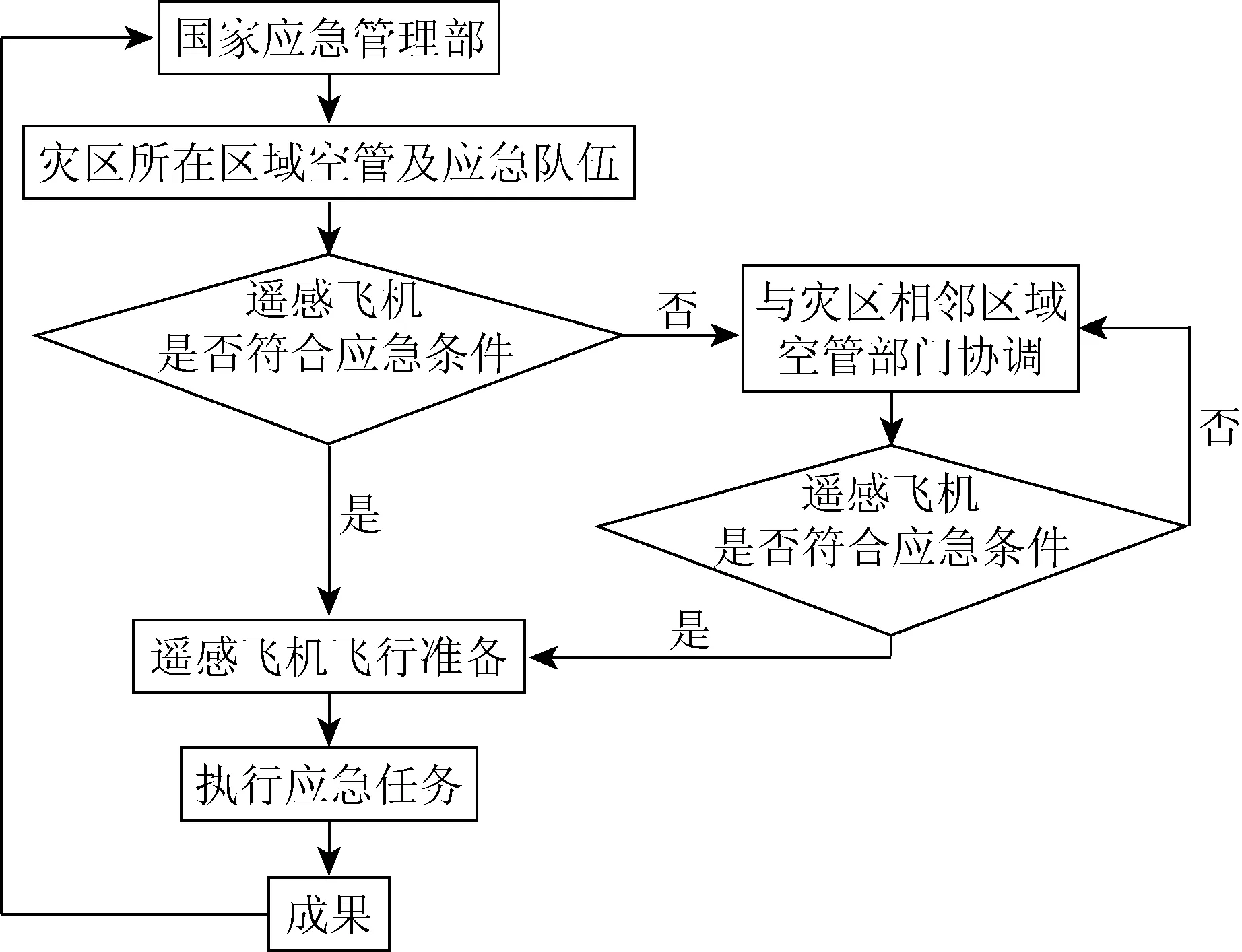
图1 区域协同模式组织实施流程Fig.1 Flowchart of regional collaboration mode implementation
具体步骤如下:
1)重大灾害发生时,国家应急管理部迅速启动航空遥感应急监测工作,发送任务指令。该部门在灾害发生时应赋有空域统筹指挥的权利或可直接对接最高级别空域管理部门,并组建应急管理队伍。
2)灾区所在区域空域管理部门和应急队伍接到上级应急指令,迅速开展航空遥感应急组织工作,前者通过择优选择本区域最适合的遥感飞机执行应急飞行任务,如果本辖区空域内没有符合条件的飞机,立即通知灾区相邻区域空域管理部门,判断是否有符合应急需求的遥感飞机。为保证应急飞行顺利开展,应选取1~2架遥感飞机为应急备选飞机; 后者负责组织监测数据处理、传输以及应急机场等地面工作。
3)被选中的遥感飞机机组根据灾情信息充分考虑灾区空域和气候条件等因素制定涵盖最大灾区范围的飞行计划,并立即执行应急任务。
4)技术团队根据预案快速处理应急遥感数据,将经科学判断分析的灾区影像成果及时上报国家应急管理部。
2 区域协同应急择优模型
对遥感飞机的择优过程决定了区域协同应急模式的实施效率,建立择优模型时应充分考虑影响航空遥感应急效率的诸多重要因素,如应急响应时间、飞机性能、作业面积、遥感设备和数据处理能力等方面,采用层次分析法建立区域协同应急择优模型。该模型的层次结构为单目标3层次模型[15-17],即目标层、准则层和方案层,目标层A为最适合航空遥感应急飞行的飞机,准则层C是根据航空遥感应急飞行要求设置的指标,方案层P为所选空域内符合要求的遥感飞机,层次模型如图2所示。
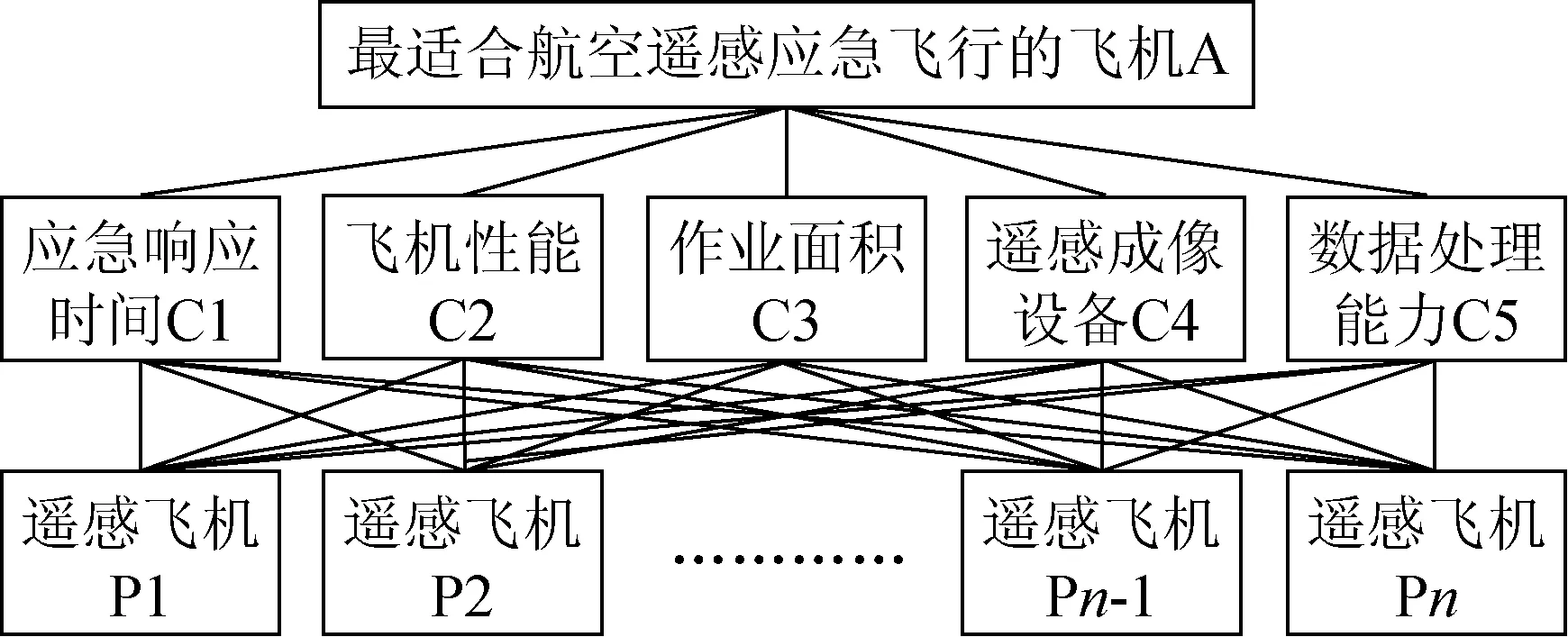
图2 应急择优层次模型Fig.2 Emergency optional optimization hierarchical model
本文准则层选用的5项指标如下:
1)应急响应时间(C1)。指遥感飞机从所在地飞达灾区空域的时间,耗时越短越好。统计规则为飞行前准备时间和飞达灾区时间2部分之和,该时间由机组预估并向空域管理部门如实报告。
2)飞机性能(C2)。飞行平台性能的优劣主要比较飞机发动机推重比(决定高度、速度和滞空时间)。灾情发生后往往伴随恶劣天气,飞机性能是在恶劣天气下飞行的重要能力指标,应尽量优先选择飞机性能好(即发动机推重比大)的遥感平台。
3)作业面积(C3)。指遥感飞机在灾区空域遥感飞行的总面积。作业面积越大,获取灾区的信息量就越大。该指标统计规则为单位时间作业面积与飞行作业时间2部分的乘积。
4)遥感成像设备(C4)。遥感设备种类较多,有光谱仪、航空数码相机、合成孔径雷达和激光扫描仪等遥感系统。为便于量化,从空间分辨率及成果应用角度对遥感成像设备进行对比排序,由高到低依次为航空数码相机、合成孔径雷达、激光扫描仪和光谱仪。
5)数据处理能力(C5)。该指标的量化较为复杂,取决于遥感测绘机构的性质与规模。这里主要参考测绘等级资质,资质越高说明该机构的专业技术能力越强。测绘等级分为甲、乙、丙、丁4个等级,且逐级递减。
3 案例及分析
我国西部是地质灾害高发地区,2008年5月12日汶川地区发生了8.0级地震,5月14日下午(震后2日)经过审批的2架遥感飞机最先抵达灾区并展开遥感监测,随后共有11架飞机抵达灾区,与16日(震后4日)将灾区遥感影像上报指挥部门。
假设此地再次发生8.0级地震,应用航空遥感区域协同应急监测机制,该地空域管理部门接到国家应急管理部命令立即启动遥感应急飞行组织工作,对该时期在辖区空域作业的遥感飞机进行统计,通过确认与更新辖区遥感飞机的应急能力信息,确定有P1,P2和P3这3家单位的遥感飞机符合要求,具体遥感应急能力信息如表1所示。
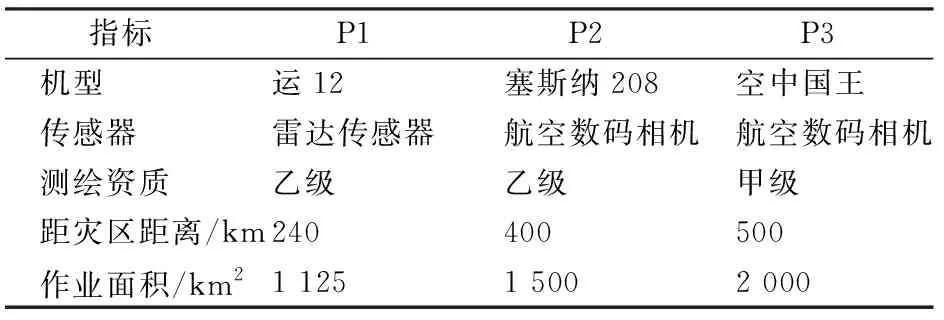
表1 航空遥感应急能力信息Tab.1 Airborne RS emergency ability information
将3家单位的遥感应急能力信息输入到择优模型中,选择最为适合应急飞行的遥感飞机。择优计算过程如下:
1)建立A-C,C1-P,C2-P,C3-P,C4-P和C5-P的判断矩阵,即
(1)
(2)
(3)
(4)
(5)
(6)
2)计算JA-C层次单排序的权向量和一致性检验。其中,JA-C的最大特征值λmax为5.073。该特征值对应的归一化特征向量为ω={0.263,0.475,0.055,0.099,0.110},则
(7)
RI=1.12,
(8)
(9)
式中:CI为一致性指标;n为矩阵阶数,RI为平均随机一致性指标;CR为一致性比率。当CR<0.1时,表明矩阵JA-C通过一致性验证。
同理,分别计算JC1-P,JC2-P,JC3-P,JC4-P和JC5-P层次总排序的权向量(ω1,ω2,ω3)并进行一致性检验,结果如表2所示。通过计算各判断矩阵,CR均小于0.1,可知JC1-P,JC2-P,JC3-P,JC4-P和JC5-P都通过一致性检验。
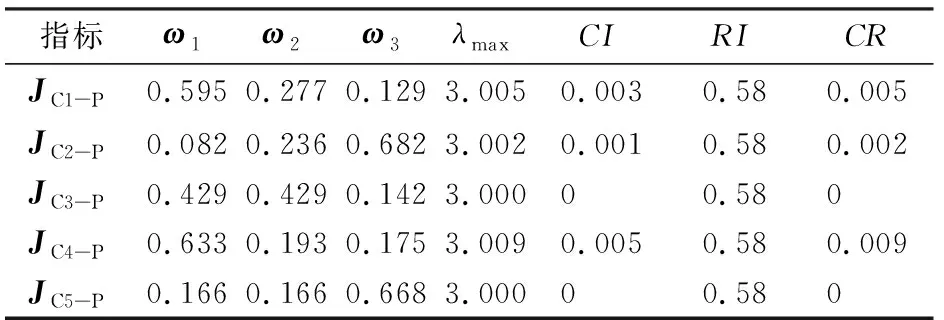
表2 JCk-P(k=1,…,5)权向量、λmax和一致性验证结果Tab.2 Results ofω,λmaxand consistency validation ofJCk-P(k=1,…,5)
3)计算层次总排序权值和一致性检验。
P1对总目标的权值为
0.595×0.263+0.082×0.475+0.429×0.055+0.633×0.099+0.166×0.110=0.3。
(10)
同理得,P2和P3对总目标的权值分别为0.246和0.456。即决策层对总目标的权向量为{0.300,0.246,0.456}。
计算决策层的CR为
CR=(0.263×0.003+0.475×0.001+0.055×0+0.099×0.005+0.110×0)/0.58=0.015 。
(11)
由于CR<0.1,故层次总排序通过一致性检验。
综上,{0.300,0.246,0.456}可作为最后的决策依据,即方案层遥感飞机的权重排序为P3>P1>P2。根据择优结果P3空中国王飞机为本次最适合遥感应急飞行的飞机,经计算该飞机将在2 h内(主要是航线飞行时间)飞达灾区空域展开应急监测任务,并预计在48 h内(震后2日)将第一批次遥感影像成果报送救灾指挥中心。另外,为保证此次应急任务顺利完成,P1运12遥感飞机作为备选应急飞机。
仿真结果与2008年8.0级地震航空遥感应急结果对比,震区影像报送时间预计能提前48 h报送灾区指挥部门,其意义不言而喻。同时也验证了区域协同应急模式及其择优模型在航空遥感应急响应方面的组织有序性和实施高效性。
4 结论
航空遥感应急区域协同模式从我国实际情况出发,从组织模式上改变了现有应急组织机制,满足了航空遥感应急在时间效率方面的要求,其择优模型使得航空遥感资源得到了更加合理的优化利用,使航空遥感应急过程实施更加科学、高效、有序。
区域协同应急模式是构建我国航空遥感应急体系的一个新思路,具有较强的可操作性和实用性。由于资料有限,算例采用模拟数据仅展示了择优过程,无法验证择优模型指标的量化是否准确与全面,该问题将是下一步研究的重点。
