多特征、多方法融合的高分辨率影像道路网提取
2018-09-04李润生曹帆之王淑香
李润生, 曹帆之, 曹 闻, 王淑香
(信息工程大学数据与目标工程学院,郑州 450001)
0 引言
随着对地观测技术、传感器技术的飞速发展,遥感影像的空间分辨率逐步提高,如何在高分辨率遥感影像上自动获取地物信息(道路、居民地等)是高分影像处理领域需要重点解决的问题之一[1]。遥感影像道路网提取一直受测绘遥感和计算机视觉等领域学者的广泛关注,相关学者做了大量研究工作,多种道路网提取算法相继涌现[2-6]。Mean和Poullis对现有的遥感影像道路网提取算法进行了全面的分析总结,根据算法中信息利用的层次将道路提取方法分为3类: 基于像素的道路提取方法、基于区域的道路提取方法和基于知识的道路提取方法[7-8]。
基于区域的提取方法是目前最常用的道路网提取算法。这类方法通过影像分类或图像分割完成道路网的粗提取,然后根据某些规则进行细化操作,最终完成道路网的提取。Song等运用支持向量机根据光谱信息从影像上提取道路类,但由于遥感影像上存在同物异谱和异物同谱等问题,这种方法很难取得令人满意的分类结果[9]。基于此原因,史文中等人同时利用空间-光谱信息和道路同质属性进行道路分类,达到了不错的效果[10-12]。考虑到高分辨率遥感影像上的道路特征非常复杂,Das等设计了一种利用显著特征提取道路网的多级框架[13]。在以上方法中,概率支持向量机被用来完成分类任务。但在道路提取中所使用的分类方法大都为监督分类,因此为了达到理想的分类精度,需要大量的训练样本。由于影像上的道路复杂多变,这些算法只能在某类遥感影像上针对特定道路展示出优良的性能,但却无法适用于其他类型的道路。因此如何定义普适性的道路特征仍有待进一步研究。高分辨率影像上道路呈现为具有同质性特征的条带状目标,在空间分布上道路目标自身具有最大的相似性,而与周围其他地物具有最大的差异性。另外,高分辨率影像上地物存在同物异谱或异物同谱现象,仅用单一特征和技术无法准确提取地物信息,因此融合多特征、多方法获取目标信息是该领域的发展方向。
1 算法基本原理
本文综合利用道路呈现的光谱、空间、同质性、几何等多种特征,提出了一种高分辨率遥感影像道路网自动提取算法。算法运用非监督分类方法完成图像聚类,并利用Gabor滤波和张量编码实现道路类自动识别,因此不需要训练样本; 同时借助感知编组理论从道路类中生成光滑连续且不含毛刺的道路网。首先利用均值漂移算法对遥感影像进行预处理,生成包含道路中心点的稳态点图; 然后采用均值漂移聚类算法对稳态点图进行分类,并运用Gabor滤波和张量编码,以线性显著性最大为准则识别道路中心点类; 最后,运用张量投票和连通成分分析从道路中心点类中生成道路网。算法流程如图1所示。
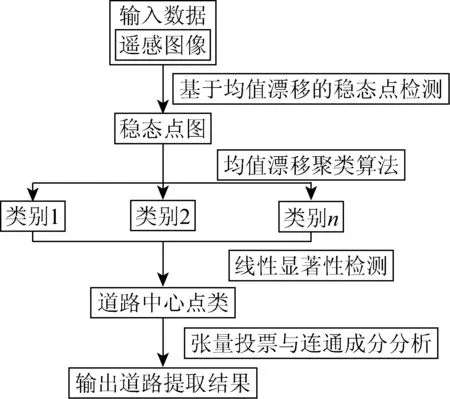
图1 道路网提取流程Fig.1 Flow chart of road networks extraction
1.1 图像稳态点图生成
稳态点是d维空间内一系列样本点对应的概率密度函数的局部极值点。本文运用均值漂移算法[14],在5维空间内(由平面坐标空间和光谱空间组成)求解图像点对应概率密度函数的稳态点,生成稳态点图。
均值漂移最初由Fukunaga等人在1975年研究概率密度函数的梯度估计时提出[15]。经过30 a的发展,已被广泛应用于图像平滑、图像分割和目标追踪等领域。Cheng对均值漂移算法进行了扩展使得其适用范围大大扩充[16]。改进后的均值漂移数学形式为
(1)
式中,w(xi)≥0为权重函数;GH(xi-x)为核函数,即
GH(xi-x)=|H|-1/2G(H-1/2(xi-x)),
(2)
式中,G(x)是一个单位核函数;H是一个d×d的正定带宽矩阵。
本文所使用的核函数为平面核函数,即
(3)
式中,H表示d×d对角带宽矩阵。
对于带状同质区域内的点,其概率密度函数的稳态点通常位于带状区域的中心线上,如图2所示。图2(a)和图2(b)用红线标记了均值漂移算法检测到的稳态点位置,x和z表示光谱坐标,y表示稳态点位置。
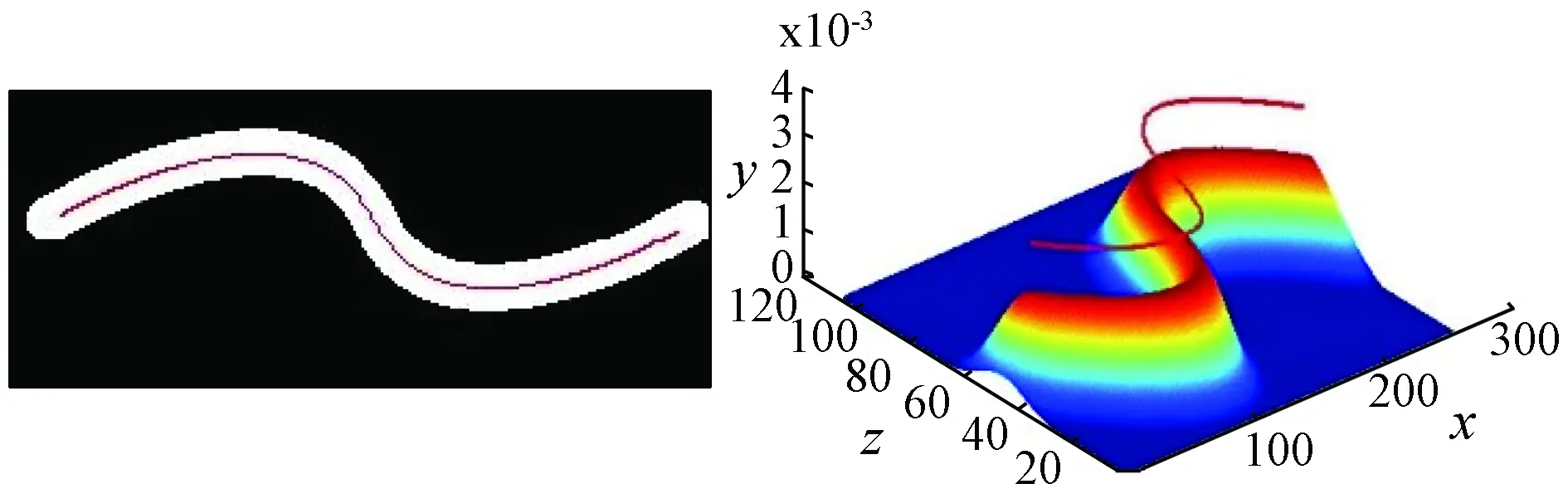
(a) 原始影像与稳态点 (b) 概率密度函数与稳态点
图2带状区域的稳态点图示
Fig.2Steady-statepointmapofstrip-shapedregion

1.2 基于均值漂移算法的道路中心点聚类
该算法运用均值漂移聚类算法根据光谱特征对稳态点图进行分类,将道路中心点类与其他地物类分离。均值漂移聚类算法是对基于均值漂移的稳态点检测的直接扩充,将在特征空间上收敛于同一稳态点的像元点归作一类。设xi和zi,i=1,...,n,分别为5维图像点和其对应概率密度函数的稳态点,Li为图像点xi的标记。具体计算步骤为:
1)对于图像点xi,运用均值漂移算法计算其对应的稳态点zi。
2)对任意两个稳态点zi和zj,当其平面空间距离小于空间带宽参数hs并且其光谱距离小于光谱距离hr时,合并这两个稳态点,即zi′=(zi+zj)/2。其中,空间带宽参数hs和光谱距离hr为经验值,选取方法可参考文献[18]。
3)重复第2)步,直到所有稳态点zi不再发生变化。
4)将剩余稳态点zi作为聚类中心{Cp}p=1,2...,m,m为聚类中心个数。对于每一个像素点xi,赋值Li={p|xi∈Cp}。
5)优化处理,排除元素个数小于M的类Ck。
1.3 道路中心点类自动识别
遥感影像上道路线状特征明显,本节主要根据这一特征进行道路中心点类的自动识别。首先运用Gabor滤波从稳态点分类图中提取线状高频信息,然后将提取信息编码为张量形式,最后运用张量运算进行信息分析,提取线状特征。
1.3.1 Gabor滤波
Gabor滤波起源于傅里叶变换,由物理学家Dennis Gabor在1946年提出,用于解决傅里叶变换无法分析局部信息的问题[17]。Daugman在他的基础上,将1维Gabor函数扩展至2维,并证明了2维Gabor滤波能够很好地模拟人类视觉单细胞的感受野函数[18]。2维Gabor滤波便被广泛应用于图像处理、特征提取、纹理分析等领域。
2维Gabor滤波g(x,y)可被定义为
(4)
式中,σx和σy分别高斯椭圆函数沿着x轴和y轴方向的标准差;f和θ分别为滤波器的频率和旋转角。由式(4)可知,Gabor滤波实质是关于参数f和θ的函数。通过选择不同参数f和θ,Gabor滤波能够运用卷积运算提取图像上不同朝向的频率信息。因此,Gabor滤波被视为尺寸和角度可调的线或边缘检测器,广泛用于图像处理领域。本文运用一组Gabor滤波器提取稳态点分类图中的线状高频信息,选择均匀分布在区间[0,π]的8个角度θi和5种频率fi作为滤波器参数,总共40个滤波器。
1.3.2 张量编码
Medioni在其提出的张量投票框架中,将数据几何信息编码为张量形式,用于图像的几何特征推断[19-20]。本文用2阶对称张量表示Gabor滤波捕获的朝向信息,然后通过张量运算检测分类图上的线状特征。2维空间的2阶对称张量的数学定义为
(5)

(6)
在本文中,算法根据以下规则检测每一类样本点中的曲线点: ①对于每一个曲线点,它的线显著性(λ1-λ2)应该大于它的球显著性λ2; ②对于每一个曲线点,它的线显著性(λ1-λ2)应该是沿着其法线方向的局部极大值点。
1.4 道路网组网
张量投票是由Medioni等人于2000年提出来的一种感知编组方法,被广泛应用于机器视觉和机器学习中[19]。本文运用张量投票算法对道路中心点进行连接生成道路网。
在2维张量投票中,几何信息可通过棍投票(stick voting)进行传递和精炼,而在投票结束之后,便通过投票分析推断几何结构特征(点或线)。图3介绍了棍投票过程,图中O点为投票点,P点为信息接收点,C点为一个同时经过点P和点O的圆的圆心。

图3 棍投票过程Fig.3 Process of stick voting
投票的显著性衰减函数为
(7)
(8)
式中,s表示点O,P之间的弧长;k表示曲率,σ为尺度因子,决定了投票的大小。
2 试验及分析
2.1 道路网提取试验
挑选一幅大小为512像元×512像元的航空影像进行道路网提取试验,结果如图4所示。图4(a)为原始影像,图4(b)为提取结果,其中红线为提取的道路中心线。从图4(b)可知,本文算法能够准确地提取整个道路网,展示出了较好的性能。

(a) 测试影像 (b) 道路网提取结果(红线标示)
图4道路网提取试验1
Fig.4Thefirstexperimentofroadnetworksextraction
为了进一步测试算法的性能,挑选2幅影像进行测试(见图5(a)和图5(c)),其中,图5(a)为0.61 m分辨率的QuickBird的卫星彩色影像,影像区域为国外某城市,影像大小为754像元×387像元。图5(c)为1.65 m分辨率GeoEye-1卫星彩色影像,影像区域为加拿大滑铁卢地区,影像大小为1 276像元×1 261像元。测试结果如图5(b)和图5(d)所示。
(a) 测试影像一 (b) 道路网提取结果一

(c) 测试影像二 (d) 道路网提取二
图5道路网提取试验2
Fig.5Thesecondexperimentofroadnetworksextraction
从图5可知,本文算法能够从影像上光滑地描绘道路中心线。但由图5(b)可知,本文算法未能从影像上提取完整的道路网,如图中绿线所示。这主要是由于本文算法比较依赖道路的光谱特征和同质属性,因此当部分道路区域的光谱属性发生改变时,均值漂移算法无法准确检测这部分道路段的中心点,因而无法将其识别为道路中心点类,最终导致这部分道路提取失败。
图5(c)整幅影像道路场景复杂,影像上道路宽度变化较大,主干道宽度较大,附属小路宽度较小。另外,道路材质包括柏油路面、水泥路面以及土质小路。道路边界特征较弱,路面干扰因素种类较多。提取过程中认为设定的空间带宽参数为: 两条主干道hs=27。从图5 (d)提取结果看,本文算法能够较完整地提取复杂场景中的道路网,而图中绿线为未能提取的道路段,这主要是由于当部分道路宽度突然变小时,均值漂移算法自适应性较差,无法准确检测这部分道路段的中心点,最终导致这部分道路提取失败。
2.2 对比试验
将本文算法与Miao等人提出的道路网提取算法[11]进行比较。实验影像为2幅大小为512像元×512像元的QuickBird影像,实验结果如图6所示,图中的红线为提取的道路中心线。2种算法都需要人工给定参数,因此保证了比较的公平。

(a) 本文方法的提取结果1 (b) Miao所提出的方法的提取结果1 (c) 本文方法的提取结果2 (d) Miao所提出的方法的提取结果2
图6道路提取对比实验
Fig.6Comparativeexperimentofroadextraction
为了评估2种算法提取的精度,使用3种评判指标进行精度衡量,即
完备性=TP/(TP+FN),
(9)
准确度=TP/(TP+FP),
(10)
提取精度=TP/(TP+FP+FN),
(11)
式中:TP为正确提取的道路长度;FP为被错误提取的道路长度;FN为未能提取的道路长度。2种方法的评判结果如表1所示。
表1道路提取精度评判结果
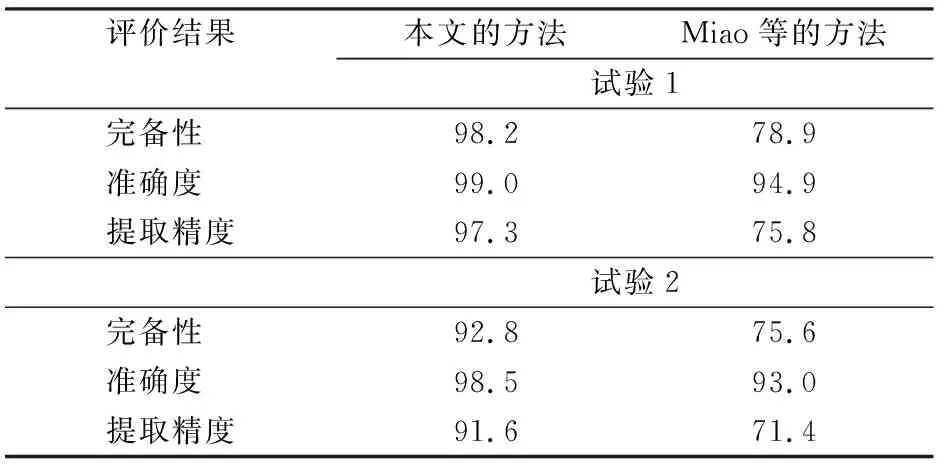
Tab.1 Evaluation results of road extraction accuracy(%)
由图6可知,相比Miao等人所提出的算法,本文算法提取的道路中心线更加光滑,准确地位于道路中心处。从表1可知,本文算法展示了良好的道路提取性能,在道路提取的完备性和精度上优于Miao的算法。另外,从算法计算效率看,本文算法与Miao等所提算法基本持平,在试验环境为CPU速度2.5 GHz,8 G内存条件下,计算图4、图5中3幅影像的时间分别为70 ms,78 ms和102 ms。处理时间与影像场景复杂度有关,另外,算法计算过程中耗时较长的步骤为中心点自动识别步骤,约占整个处理过程的2/3。后续可围绕如何优化识别算法进行深入研究。
3 结论
本文提出了一种基于道路同质属性和形状特征的高分辨率遥感影像道路网提取算法,得到如下结论:
1)本文所提出的道路网自动提取算法能够准确地从高分辨率影像上提取道路网。
2)计算时要注意的是算法需要人工设置均值漂移带宽参数。空间带宽参数hs的设置应该大于待提取道路的宽度,以保证算法能够提取较窄道路的中心线。
3)通过试验对比,表明算法展示了良好的道路提取性能,在道路提取的完备性和精度上均优于Miao的算法。从算法计算效率看,本文算法与Miao等所提算法基本持平。
4)但本文算法还存在2个局限: ①当道路网的光谱特征发生变化或者当其他地物具有和道路相似的光谱特性和几何形状时,算法无法准确地提取完整的道路网。②算法需要提前设置带宽参数。
5)下一步可利用道路边界梯度特征,通过少量道路种子点计算不同类型道路宽度,从而达到自动设置带宽参数的目的。另外,将引入道路拓扑结构,增加算法的鲁棒性,同时尽可能地减少人工干预。
