无人潜航器舵板与舵杆的通用结构设计
2018-08-31
中国船舶重工集团有限公司第七一〇研究所 湖北宜昌 443003
笔者以某成熟产品为原型,具体阐述无人潜航器(UUV)舵板与舵杆的通用结构设计。UUV内部装配了水平及垂直方向舵机,舵机通过输出轴传递扭矩,带动舵板转动。输出轴在UUV舵机孔座上通过轴承支撑,同时与相应密封座配合来实现对舵机孔座的密封。舵板一端通过四方孔与输出轴连接,由紧钉销钉固定[2],另一端通过支撑板内的滑动轴承支撑。舵板由两点支撑,可靠性、稳定性更高。舵机及其相关结构布置如图1所示。
1 舵板及舵杆结构
UUV舵板及舵杆的结构形式较通用船舶的更加简单实用[3],舵杆采用高强度不锈钢加工而成,将其预埋到玻璃纤维增强塑料中,待结构固化后即形成舵板。其中,舵板的外表面型值通过钢模形成,舵板结构如图2所示。
舵板将舵杆固定在舵面的钢模内,通过手工糊玻璃纤维布及填充环氧树脂成型。舵杆上设计有φ12 mm定位销孔,保证舵杆与钢模之间的相对位置。舵杆结构如图3所示,M30-6g可用60°的V形槽代替,要求V形槽底径不小于M30螺纹小径。V形槽可增大舵杆与玻璃纤维增强塑料的黏接面积,提高黏接强度[4]。
2 舵板及舵杆材料选用
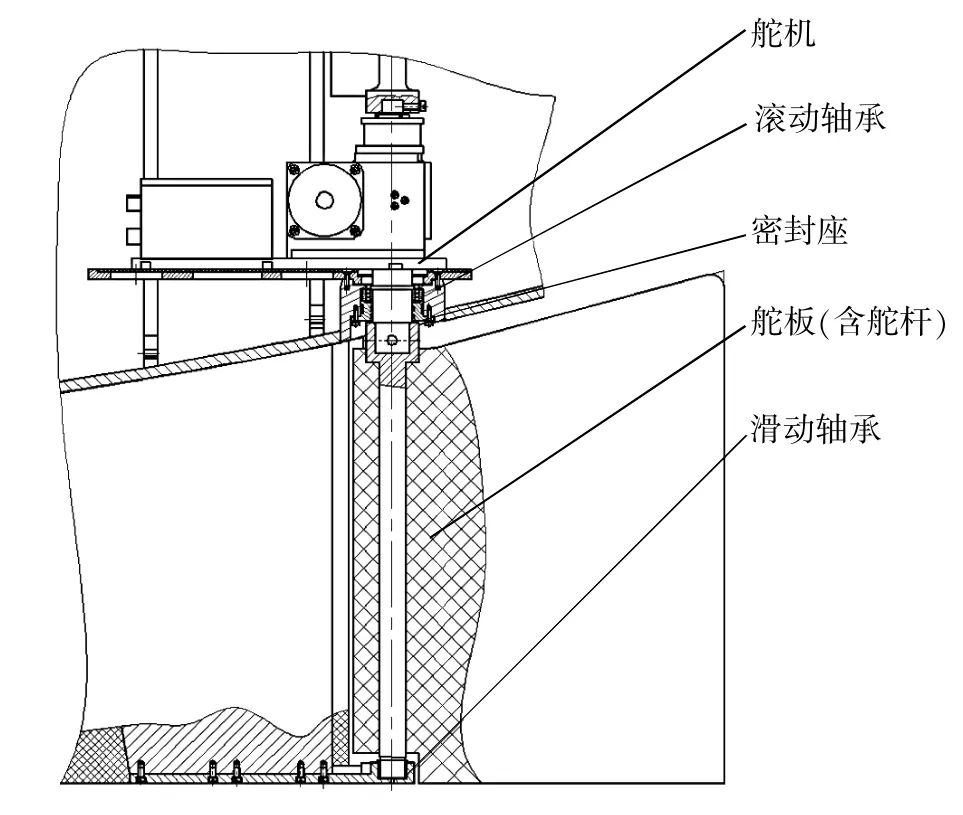
▲图1 舵机及相关结构件布置
根据舵板的受载荷情况,需要选择屈服极限更高的材料作为舵杆材料。根据某型号产品经验,选用2Cr13,其屈服极限较高,有一定的磁性,满足材料特性要求,舵杆材料力学特性见表1[5]。舵面材料选用玻璃纤维增强塑料,其比强度高,成本低廉,具有广泛的工程应用价值。

表1 舵杆材料力学特性

▲图2 舵板结构
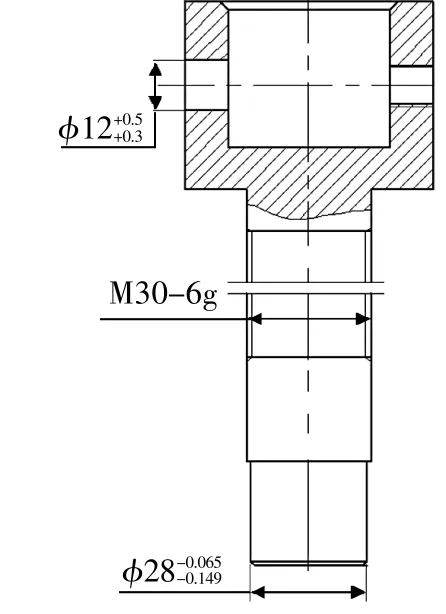
▲图3 舵杆结构
3 舵杆直径计算及校核
根据UUV的流体特性,舵板的外形参数已确定。依据UUV和舵机性能指标要求,可以按公式计算舵杆输出轴根部直径。
水平舵与垂直舵完全对称分布,承受的载荷也基本一致。采用两端支撑舵杆的结构形式,可将舵杆看成两端支撑的梁,压力中心距舵根剖面距离a=0.233 m,舵板平均展长b=0.55 m,压力中心离外缘一端距离g=b-a=0.55-0.233=0.317 m,舵杆根处所受载荷最大,需计算并校核舵杆输出轴根部的直径[6]。
舵杆根处的最大弯矩M为:

其中:F为10 kN时垂直于单舵平面的分力。
舵杆所受的扭矩QH=-122 N·m,舵杆同时受扭矩和弯矩的作用,其输出轴根部直径d为:

式中:α为剪应力脉动循环变化的修正因数。
考虑到一些不可预见的冲击力,取舵杆输出轴根部直径d=45 mm。
4 舵机输出轴密封设计
舵机输出轴通过密封座实现密封,密封座如图4所示。密封座Ⅰ所对应的面与舵机输出轴配合,实现两道密封。密封座Ⅱ所对应的面与舵机孔座配合,实现两道密封。密封面Ⅰ、Ⅱ均按GB/T 3452.3—2005《液压气动用O形橡胶密封圈沟 槽尺寸》设计[7-8]。
5 舵机输出轴支撑轴承选用与校核
舵机输出轴与壳体的连接处选用深沟球轴承,与鳍的固定端选用滑动轴承。

▲图4 密封座
5.1 深沟球轴承选型
深沟球轴承根据GB/T 276—1994《深沟球轴承》选用轴承型号61909,经计算校核,满足使用要求[9]。
5.2 滑动轴承尺寸确定
5.2.1 设计参数
滑动轴承的轴颈为h,轴承接触工作宽度为L,一般选取L/h=0.5~1.5[10]。 笔者选取h=28 mm,L=20 mm,如图5所示。
5.2.2 验算限制轴承的压强P

式中:[P]为轴瓦材料的许用压强,[P]=20 MPa;Fr为轴承的径向载荷。

P<[P],故可以防止轴瓦过度磨损。
5.2.3 验算限制轴承的Pv值
Pv值表征了轴承发热量的大小,Pv值越大,发热量越高,温升越大,润滑效果越差,越容易造成胶合破坏。

式中:v为轴颈的圆周速度,v=πhn;n为轴的转速;[Pv]为轴瓦材料的Pv许用值,[Pv]=15 MPa·m/s。

根据以上计算校核来选取径向滑动轴承,轴套材料为铜基合金[11-12],牌号为ZCuAl10Fe3,该材料适宜制造在海洋环境中工作的轴承。
6 结束语
舵板与舵杆结构件作为UUV上不可或缺的部分,对UUV的功能及使命完成起到关键作用。当前UUV行业迅猛发展,各种规格尺寸的产品层出不穷,但舵板与舵杆结构件没有一个成熟可靠的结构形式。笔者以某产品舵板与舵杆为原型,详细阐述了其总体布置方案及具体设计流程。

▲图5 滑动轴承
这一结构形式已在其它多种型号产品上成功应用,经过湖上和海上多种工况下验证,具有可靠性高、使用寿命长和结构件互换性强等优点,可以作为一种舵板与舵杆的通用结构,为其它相关领域舵板与舵杆结构件的设计提供借鉴和参考,具有较高的工程应用价值。
