可穿戴上肢机械臂可用性设计与研究*
2018-08-31
郑州航空工业管理学院航空经济发展河南省协同创新中心 郑州 450015
可穿戴上肢机械臂如图1所示,指在特殊工程作业条件下能够综合应用传感、识别、通信、测绘、交互等功能,并配备独立信息智能处理系统的特种依附式机器人。可穿戴上肢机械臂的可用性设计技术指被融合进可穿戴上肢机械臂设计任务中,以可用性为目标,以确保机械臂与其各项功能具有较强实用价值的技术,是目前高端复杂依附式机器人研发的关键应用技术[1]。

▲图1 可穿戴上肢机械臂
1 特征分析
1.1 设备特征
可穿戴上肢机械臂属于人体外骨骼依附式机器人,依托人类智力与机器设备动力的高度融合,强调人的智力与肢体直接参与机器人的控制,并通过相关技术的结合来完成工程制造和生产生活中单靠人体上肢无法完成的作业。可穿戴上肢机械臂可以代替手持工具或其它复杂多人联合使用的特殊器械[2],主要特征包括实现工具的独立应用、用户服务互动交流、生产技术规划管理、特殊作业即时监测、工作人员安全保障等。
1.2 用户特征
可穿戴上肢机械臂针对特定用户而进行定制[3],因此需要对用户特征进行分析。用户特征见表1。

表1 可穿戴上肢机械臂用户特征
对于可穿戴上肢机械臂而言,其用户群体较为固定,且作为一种高科技产品,目前正处于探索阶段,因此对用户特征进行分析是必备的环节。
2 可用性设计
2.1 设计目标
基于可用性设计要求[4],设定可穿戴上肢机械臂的设计目标。
(1)经济性。相对于其它机器人,可穿戴上肢机械臂属于特种依附式机器人,用户多为理性消费群体,此部分消费者较看重产品品质及功能性,希望以最实惠的价位购买到最具有实用功能的产品。因此在对可穿戴上肢机械臂进行可用性设计时,要着重考虑可穿戴上肢机械臂的可用性和经济性,以最实用的功能、最精简的设计为用户提供最优质的服务[5]。
(2)安全性。使用户能够安全、迅速、方便地对可穿戴上肢机械臂进行代入式操作,并基于人的心理特征及上肢的生理特征,在整个过程中杜绝由于人为原因出现的失误或由机械臂自身故障所引起的计算错误,从而全面提高可穿戴上肢机械臂的安全性[6]。
(3)人机性。基于特定使用人群的作业行为、能力、认知、操作习惯等,应用人机工程学在外观比例、功能结构、造型材料等方面进行综合设计,真正实现可穿戴上肢机械臂的可用性。
(4)适用性。由于作业环境不同,可穿戴上肢机械臂在可用性设计时,需充分考虑使用环境对用户的影响,总结出使用可穿戴上肢机械臂进行作业时需满足的基本环境及各类其它要求。
2.2 设计原则
分析可穿戴上肢机械臂的用户特征,以可用性为中心,基于经济性、安全性、人机性、适用性等设计目标,确定可穿戴上肢机械臂的设计原则[7],见表 2。
表2 可穿戴上肢机械臂设计原则
3 设计实例
3.1 原型机
通过对可穿戴上肢机械臂及用户特征的综合分析,并依据可用性设计目标、设计原则及相关标准[8],设计出的可穿戴式上肢机械臂原型机,如图2所示。

▲图2 可穿戴上肢机械臂原型机
可穿戴上肢机械臂使用时需穿戴于工程技术人员身上,整机标准质量为7~7.2 kg,适合年龄18~45岁、身高170~180 cm、受过中高等教育的健康男性用户使用。
为增强使用的安全性,防止可穿戴上肢机械臂在作业时可能造成的人体损伤,对传力角度作如下设定:以矢状面为基准,水平方向肩关节外展-1~101°、内收 -1~45°;以水平面为基准,竖直方向肩关节上摆-1~90°、下摆-1~111°;旋转运动时肩关节内旋-1~85°、外旋-1~45°,肘关节弯曲 -1~135°、旋前旋后-1~55°。所设计的可穿戴上肢机械臂采用上位机控制的运行模式,具有单关节独立运动和多关节联动两种方式[9]。
为确保人机性与适用性,可穿戴上肢机械臂内部的运动部件包括:①肩关节水平与旋转运动机构,主要由蜗轮蜗杆、水平联动带、联动盘联动实现;② 肩关节上下移动机构,主要由前臂连接、调节滑槽、液压杆、蜗轮蜗杆联动实现;③肘关节与腕关节屈伸运动机构,主要由腕关节、齿轮转动机构、液压连接、肘关节联动实现。由于工程技术人员在使用可穿戴上肢机械臂时,需保证腕关节与指关节能比较方便地进行运动,因此笔者将腕关节与手指部位设计为可跟随人体手臂自由转动的结构,运动由握控手柄、四指抓手、旋转360°接头、前臂固定环联动实现。
可穿戴上肢机械臂整体构型如图3所示。
3.2 关键技术
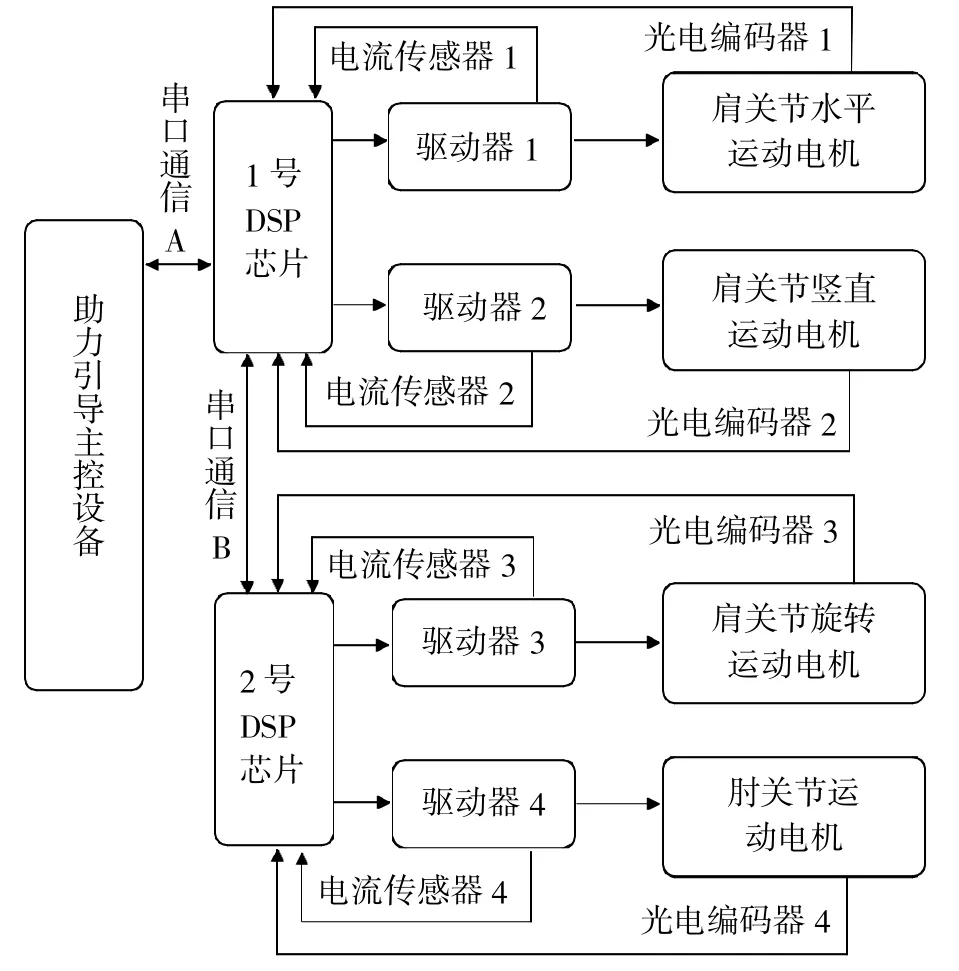
为使可用性设计向高度智能化技术层面靠拢,依据用户特征与可穿戴上肢机械臂功能,在硬件设计时采用两片数字信号处理器(DSP)芯片作为可穿戴上肢机械臂控制电路核心。1号DSP芯片控制肩关节的竖直与水平运动,用户可以选择运动方式,设置关节运动参数。相关运动参数可以传递至主控设备,肘关节和肩关节旋转运动参数还可以传递至2号DSP芯片。2号DSP芯片控制肘关节与肩关节的旋转运动,同时根据1号DSP芯片所传递的旋转运动参数进行联合运算,将合作计算后的运动参数转化为电机转动指令,输出至运动电机驱动器。
以安全性与稳定性为前提,可穿戴上肢机械臂控制系统设计时,驱动器采用双极性H桥驱动放大电路。为了防止因电机输出扭矩过大对人体上肢可能造成的伤害,实时对驱动器的输出电流进行DSP监控反馈检查,如出现输出电流超标情况,则及时停机处理。为避免因可穿戴上肢机械臂关节旋转过度或不足对用户造成的安全隐患或不适,引入4个光电编码器来检查电机的实时作业情况[10-14]。
可穿戴上肢机械臂控制系统如图4所示。

▲图3 可穿戴上肢机械臂整体构型
▲图4 可穿戴上肢机械臂控制系统
4 结论
采用可用性设计技术,对可穿戴上肢机械臂设备特征与用户特征进行了分析,并提出了可用性设计目标与设计原则。
在理论研究的基础上,设计了可穿戴上肢机械臂原型机及其控制系统,实现了产品的经济性、人机性、安全性和适用性。所做研究可为下一代可穿戴上肢机械臂的可用性设计提供参考。
