基于远红外相机的被动式光场成像
2018-08-30吕南方张存林谢缘
吕南方,张存林,谢缘
(首都师范大学 物理系,北京 100048)
光场成像是一种基于几何光学原理与全光函数模型的非相干计算成像方式。在光场成像中,光场被抽象为带有“方向”与“位置”信息的“光线”集合,这种“集合”可通过4D全光函数进行表示[1]。较之传统成像方式,基于4D光场信息的光场成像方式蕴含着更多的信息量。通过基于相机阵列[2-4]、微透镜阵列[5-7]、编码掩模板[8-10]等方式的光场成像系统对成像目标的4D光场进行分辨与采集,可以运用算法对目标的4D光场进行重构与渲染,以实现对目标图像的重聚焦[11]、超分辨率重构[12]、深度估计[13]、3D重构[14]、高速摄影[2]等方面的拓展与增强。
由于光学设计水平与CCD技术的成熟,光场成像在可见光波段已经得到了深入研究与广泛应用。然而在对成像质量提升需求同样迫切的远红外与太赫兹波段,光场成像技术的发展与应用则仍在摸索之中[15-16]。自1991年Adelson从计算机图形学角度提出光场成像的概念[17],以及1996年Levoy首次提出实用化的光场采集方式与系统以来[18],可见光波段的光场采集技术与重构算法被广泛研究,基于光场成像原理的商业化光场相机也已见诸市场。
而在远红外波段,一方面,由于远红外与太赫兹波的波长远长于可见光,因而远红外与太赫兹波段成像系统本身的分辨能力受到波长性质的限制;另一方面,工作于远红外与太赫兹波段的探测器件在噪声、敏感度、加工工艺等方面的性能仍不足以满足高性能、高分辨率成像的需求,这进一步限制了远红外与太赫兹波段成像系统的成像能力。
基于微测热辐射计(microbolometer)的面阵探测器是一种响应频段覆盖远红外波段的新型探测器。较之工作于同样波段的面阵探测器,其具有响应频段宽、分辨率高、等效噪声功率低、帧率高等优点。然而由于其工作原理,导致其在工作过程中,诸如热噪声、热传导、以及零点漂移等因素会对成像效果造成显著影响[19]。因此,目前的远红外与太赫兹波段成像手段并不能很好地满足实际应用的需求。然而,通过在远红外与太赫兹波段的成像应用中引入光场成像的手段,则有望提升成像能力,解决上述方面的不足。
1 光场理论与4D全光函数
光场(Light Field)理论是一种用于描述光辐射在三维空间中传输特性的模型,其基于几何光学的近似与非相干条件下的简化,将光的能量抽象为以“方向”和“位置”表示的“光线”集合进行描述。在忽略光的相干性与波动性的情况下,光场理论可以很好地近似描述光的空间传播与成像过程。
从几何学的角度,抽象为空间直线的“光线”,在固定波长、固定时刻、忽略遮挡的前提下,可以通过四个参数进行描述。而在实际的光场成像系统中,基于目前主流的光场采集系统所采用的采集方式,最常用的光场参数化模型是双平面模型。具体而言,就是在空间中构建两个位置与距离确定的平行平面,然后在两个平面分别建立直角坐标系,通过光线分别与两个平面相交的交点坐标来描述光线,如图1所示。
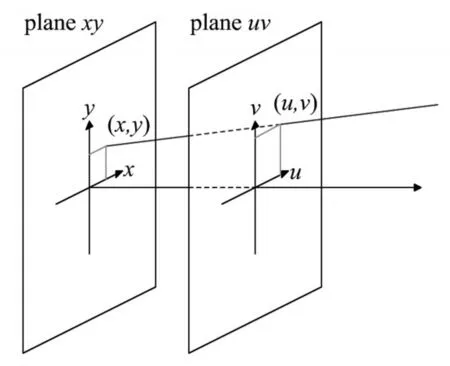
图1 双平面法表示光场示意图
用来描述“光线”集合的函数,被称为全光函数,表示为F2P(x,y,u,v)。对应到实际的光场采集系统,双平面模型中的两个平面通常分别代表光场采集系统的真实孔径或等效孔径所在平面与探测器阵列所在平面(或其在物空间的共轭平面)。对于实际的4D光场采集系统而言,相机阵列构型是最直接也是最易实现的系统构型。相机阵列构型是通过相机阵列或相机扫描的方式,在空间中不同位置采集4D光场的2D切片,并最终将其融合成完整4D光场信息的采集方式。具体而言,可将相机视为记录光线方向的针孔相机,而对于相机的每一次记录,则可将其视为记录了对应xy平面上特定一点(x0,y0)与uv平面上所有点的光线,亦即4D光场的一个2D“切片”,其方程表达式如式(1)所示。
通过相机在xy平面上不同位置记录的2D切片,我们即可获得完整的4D光场信息,如图2所示。

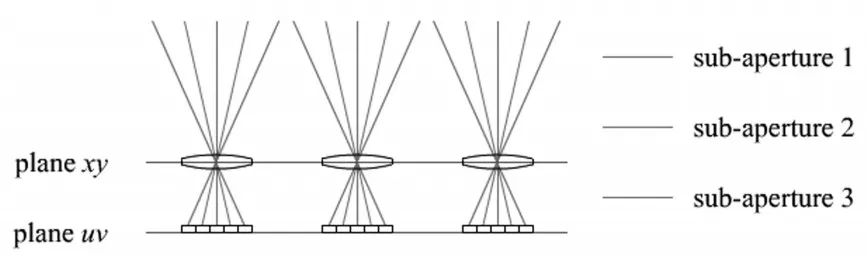
图2 2D光场“切片”与光场采集模型示意图
光场的重聚焦同样基于几何光学与“光线”模型。如图3所示,设uv平面与xy平面的距离为d,重聚焦平面与xy平面的距离为l,则4D光场F2P(x,y,u,v),在距离l的重聚焦切片Srefocused(l)(s,t)可表达为方程(2):

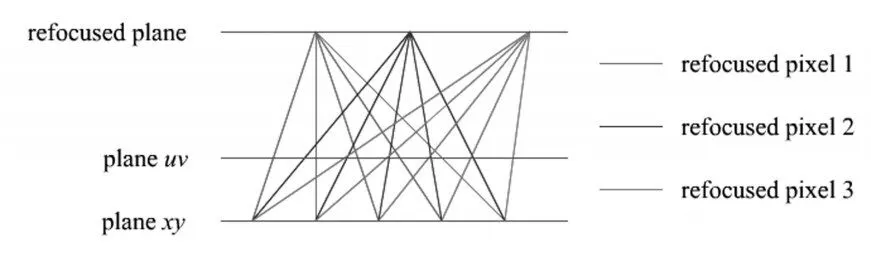
图3 光场的重聚焦示意图
2 实验与结果
实验系统的设置如图4所示。相机系统被安装在可以进行二维移动与定位的电控平移台上,相机指向固定。通过由平移台承载相机在固定平面上的不同位置采集关于样品2D红外图像的方式,来采集关于样品的4D完整光场信息。
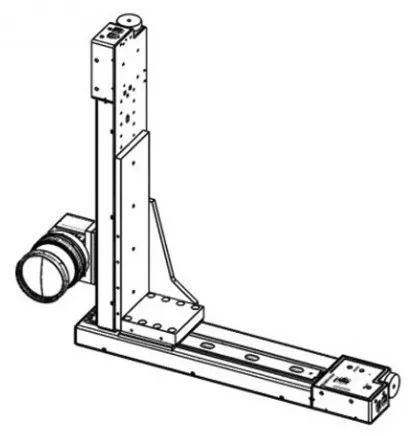
图4 光场成像系统示意图
成像目标为带有不同镂空形状的金属制工具卡片,如图5所示。成像系统通过接收样品反射环境中的红外辐射进行成像。样品与相机平面的距离约为750mm。
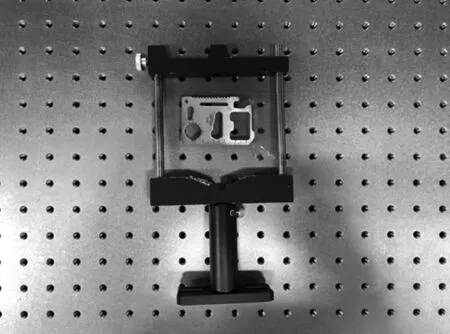
图5 成像目标示意图
采用INO公司的IRXCAM-THz-384远红外/太赫兹相机系统作为采集系统,该相机系统采用了基于微测热辐射计的二维面阵探测器,探测器阵列分辨率384×288像素,单个探测器尺寸35μm;探测器的频率响应范围在0.1THz-4.25THz,等效噪声功率低至20pW;相机系统采集帧率48Hz,通过千兆以太网接口输出16位高质量灰度图像。相机系统配有一套带有聚对二甲苯镀膜的高阻硅材质成像透镜,焦距44mm,F数0.7。其实物示意图如图6所示。

图6 INO IRXCAM-THz-384相机系统示意图
通过搭建的光场成像系统,采用相机扫描分时采集的方式采集了关于样品的远红外静态4D光场。直接由相机采集的光场切片如图7(a)所示。对于相机直接采集的光场切片而言,由于探测器灵敏度与噪声限制,原图像可见显著而不均匀的尖锐噪声,且噪声幅值高于图像中感兴趣特征信号的幅值。这使得噪声在淹没了图像中的感兴趣信息的同时,也难以通过常规图像处理手段进行滤除。
经过重聚焦重构的光场图像如图7(b)所示。在经过重聚焦重构之后,原本尖锐而不均匀的噪声此时已变得相对均匀而平缓。然而此时图像的信噪比仍然不高,部分感兴趣特征也仍然被淹没于噪声之中。
注意到探测器的固定模式噪声在总的噪声分量重占据了主要因素。通过对图像信号进行裁剪并在无穷远距离重聚焦的方式,可以获得探测器噪声当中的固定模式噪声分量,如图7(c)所示。而以此对光场切片进行预处理,可以显著滤除光场切片中的噪声,如图7(d)所示。通过增强的4D光场信息,再次对其进行重聚焦重构,并得到了高信噪比的清晰图像,如图7(e)所示。
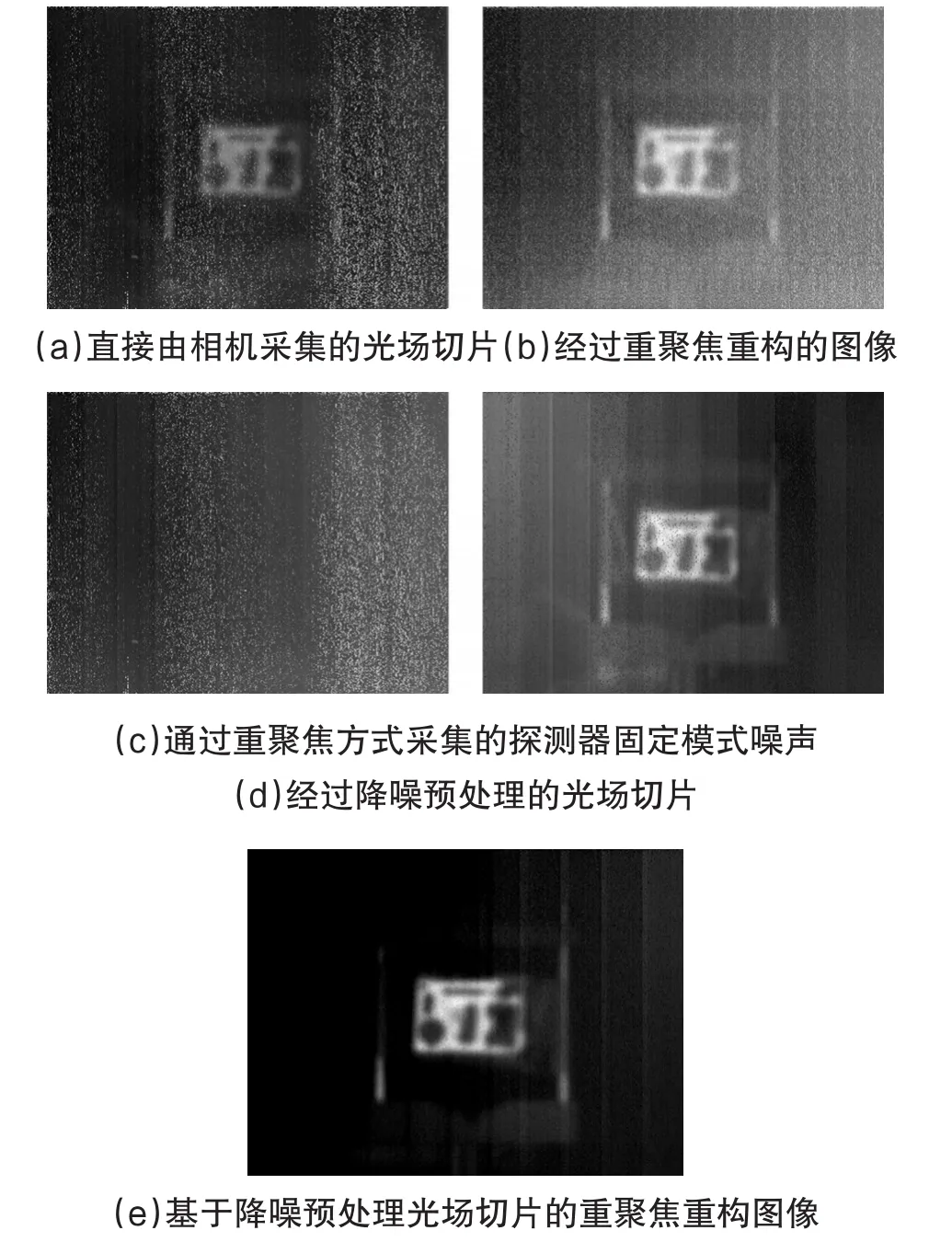
图7 成像结果示意图
3 结论
利用光场成像的手段,通过对成像目标4D光场的采集与重构,以及基于光场成像方法对2D光场切片的预处理,可以有效改善现有远红外相机成像当中信噪比低下以及固定模式噪声难以滤除的问题,使得成像效果得到显著增强。
