激光制导武器半实物仿真主控系统研究
2018-08-30范丽韩文波
范丽,韩文波
(长春理工大学 光电工程学院,长春 130022)
半实物仿真主控系统是激光制导半实物仿真系统中的重要组成部分[1],主控系统主要完成对试验任务进行参数配置、控制实验流程及对仿真试验数据进行采集、存储和显示的功能,完成闭环仿真试验。
1 激光制导武器半实物仿真主控系统组成及功能
激光制导武器半实物仿真系统是在实验室条件下模拟导弹攻击目标的全流程,其组成如图1所示。转台正上方安装一套二维摆镜系统,激光束将照射到漫反射屏上,用于模拟目标运动轨迹。两轴转台模拟弹体运动,转台上安装导引头(视觉检测系统)。主控计算机接收导引头检测到的光点相对视场中心线的视线角从而观测目标的方位信息,经计算后输出控制两轴转台的运动,从而实现闭环仿真实验。最后由三维视景计算机形象、生动地显示战场环境和导弹攻击目标的过程。
主控系统是激光制导武器半实物仿真系统的重要组成部分,如图1的虚线部分。主控系统实现半实物仿真各计算机之间的通信,对仿真试验数据进行采集、存储和显示,根据试验任务进行参数配置,控制实验流程。

图1 主控系统组成框图
2 主控系统各通信接口设计
主控计算机需要与导引头、二维振镜、转台控制计算机、三维视景计算机进行通信,这就需要选择适合的通信方式。主控系统的连接方式如图2所示。

图2 主控系统通信接口
(1)主控计算机与转台计算机的通信实时性要求特别高,选用高速、实时、确定性好的光纤反射内存。解决实时系统中数据传输的实时性问题[2]。
(2)主控计算机与三维视景计算机间的通信实时性要求并不是很高,选用以太网通信[3]。
(3)主控计算机与二维振镜的通信只是控制系统仿真环境设置参数和参数回传,相对简单且对实时性要求不高,采用RS232串口通信方式。
(4)导引头对目标进行实时采集后发送给主控计算机,速率要求较高,选用传输速度能达到1000Mbit秒的千兆网卡[4]。
3 半实物仿真主控系统软件设计
主控系统的软件开发环境为Windows+RTX系统坏境,RTX可实现0.5ms的精确定时,适合于连续动力学系统数学和半实物仿真[5]。主控软件的人机交互模块采用Windows环境下C++语言进行编程,而闭环仿真实验中的弹道解算模块因为要求实时性,需要运行在RTX环境下,二者通过共享内存进行通讯。
3.1 主控系统架构设计
主控系统需要实现人机交互的功能,包括指令模块和显示模块。主控系统的逻辑架构图如图3所示。
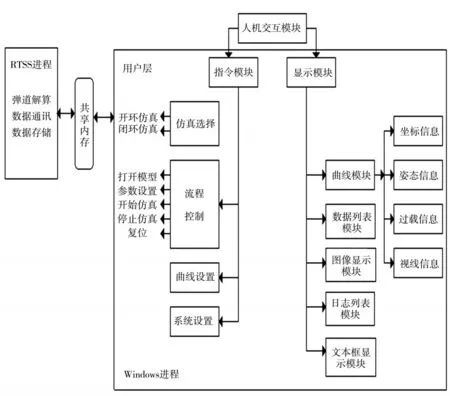
图3 主控软件逻辑架构图
3.1.1 指令模块
指令模块负责用户向计算机发出指令,具体可实现仿真选择、流程控制、曲线设置、系统设置。
仿真选择提供了半实物仿真系统的开环仿真试验和闭环仿真试验两种仿真模式。
(1)开环仿真试验主要考查导引头在弹道仿真条件下是否能正确跟踪目标,考核导引头制导信号是否正确,通过数据分析,查找系统存在的问题,为最终闭环仿真试验做准备。实验流程包括主控计算机运行弹道仿真程序,导引头将敏感到的弹目视线角信号发送给计算机,但此制导信息并不参与计算机的弹道解算,而是利用计算机自身的导引头数学模型进行解算并形成弹道闭环。其仿真流程如图5所示。
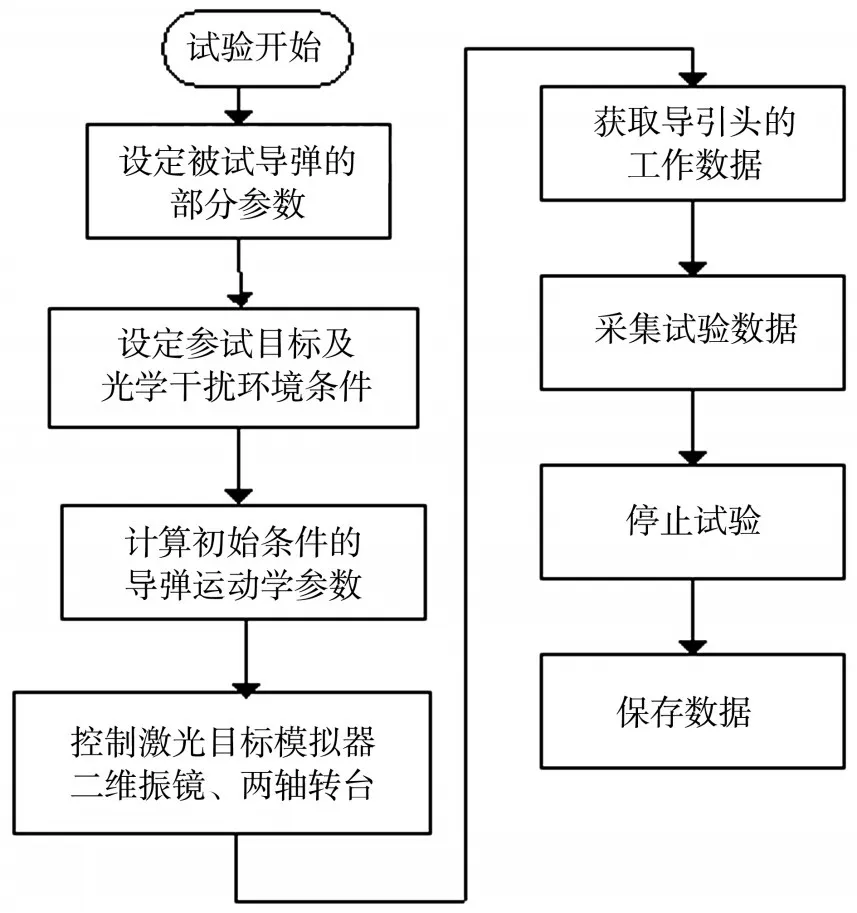
图5 开环仿真实验流程
(2)闭环仿真试验主要实现导弹攻击目标的全过程仿真。试验前设定闭环周期、被试导弹的各项参数等信息,仿真试验进行时,主控计算机接收导弹运动模型解算出的运动学数据、导引头回传的测量数据,计算舵机数学模型的控制输出角度,形成一次弹道仿真的闭环实验,经多次重复实验直至命中目标。最后主控计算机给出在全弹道状态下的脱靶量。闭合仿真实验流程如图6所示:

图6 闭合回路仿真流程
流程控制:主要用于控制仿真试验的工作流程。按照“打开模型->参数设置->开始仿真->停止仿真->复位”的操作顺序进行控制,并且过程信息将记录显示在日志列表区域。
曲线设置:提供了对四个曲线控件的样式设定。
系统设置:提供了网络参数的设置及数据库连接等。
3.1.2 显示模块
显示模块是为了使观测者能直观地看到导弹的坐标信息、姿态信息、过载信息、视线信息等。其流程框图如图7所示。
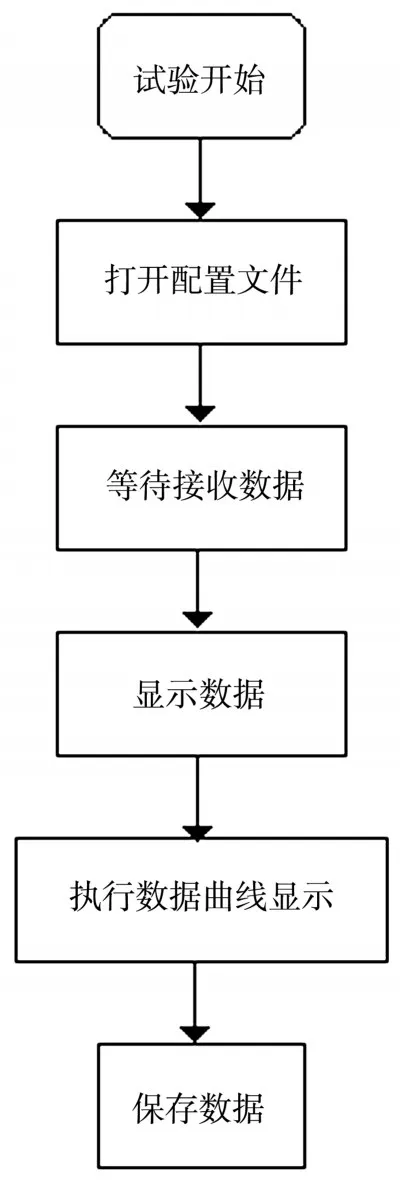
图7 显示模块流程图
3.2 主控系统在RTSS进程和Windows进程下的具体设计
首先将软件划分为Win32进程下的模块与RTSS进程下的模块,确定模块间的调用关系以及模块的接口,其具体划分如下表1所示:
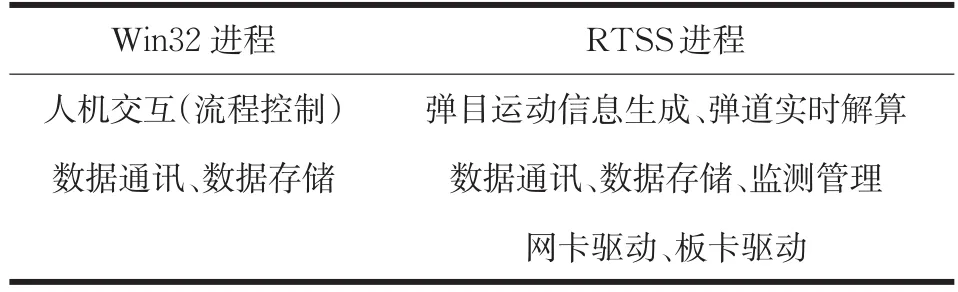
表1 Win32进程和RTSS进程模块分类
3.2.1 Win32进程下程序设计
Win32进程下人机交互程序主要实现创建共享内存及创建RTSS进程,启动定时器及读取共享内存数据及异常处理等。具体流程图如图8所示。

图8 Win32进程下程序流程图
3.2.2 RTSS进程下程序设计
RTSS进程下读取弹道解算实时数据程序主要实现打开共享内存、启动定时器及读取共享内存数据,同步输出弹道结算数据及异常处理。具体流程图如图9所示。
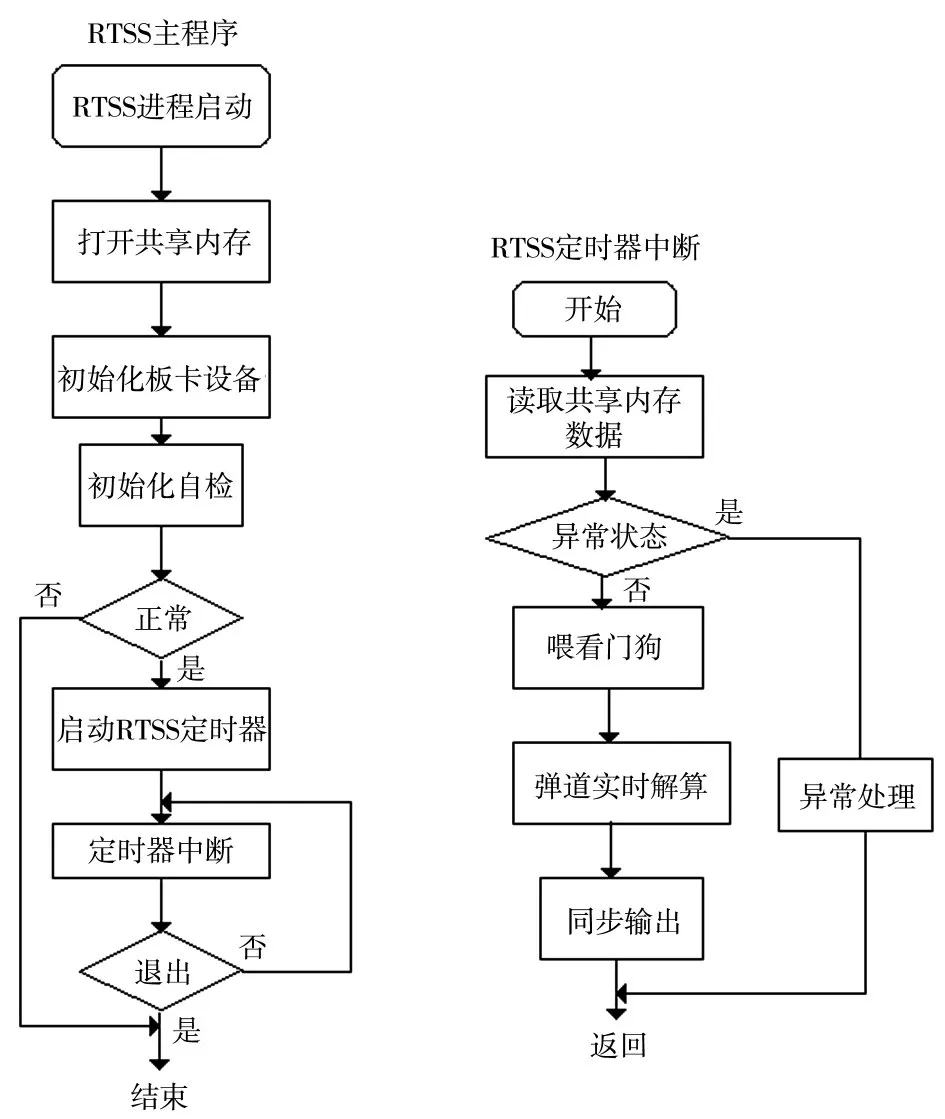
图9 RTSS进程程序流程图
3.2.3 Windows进程与RTSS进程间通信
Win32进程与RTSS进程的通讯模块是是通过共享内存进行的,共享内存是定义在这两个进程下的特定的物理地址区域,在获得指针后,两个进程就可以对其进行读写操作。且在两个进程下的所有模块都可直接调用此模块中的共享内存[6]。
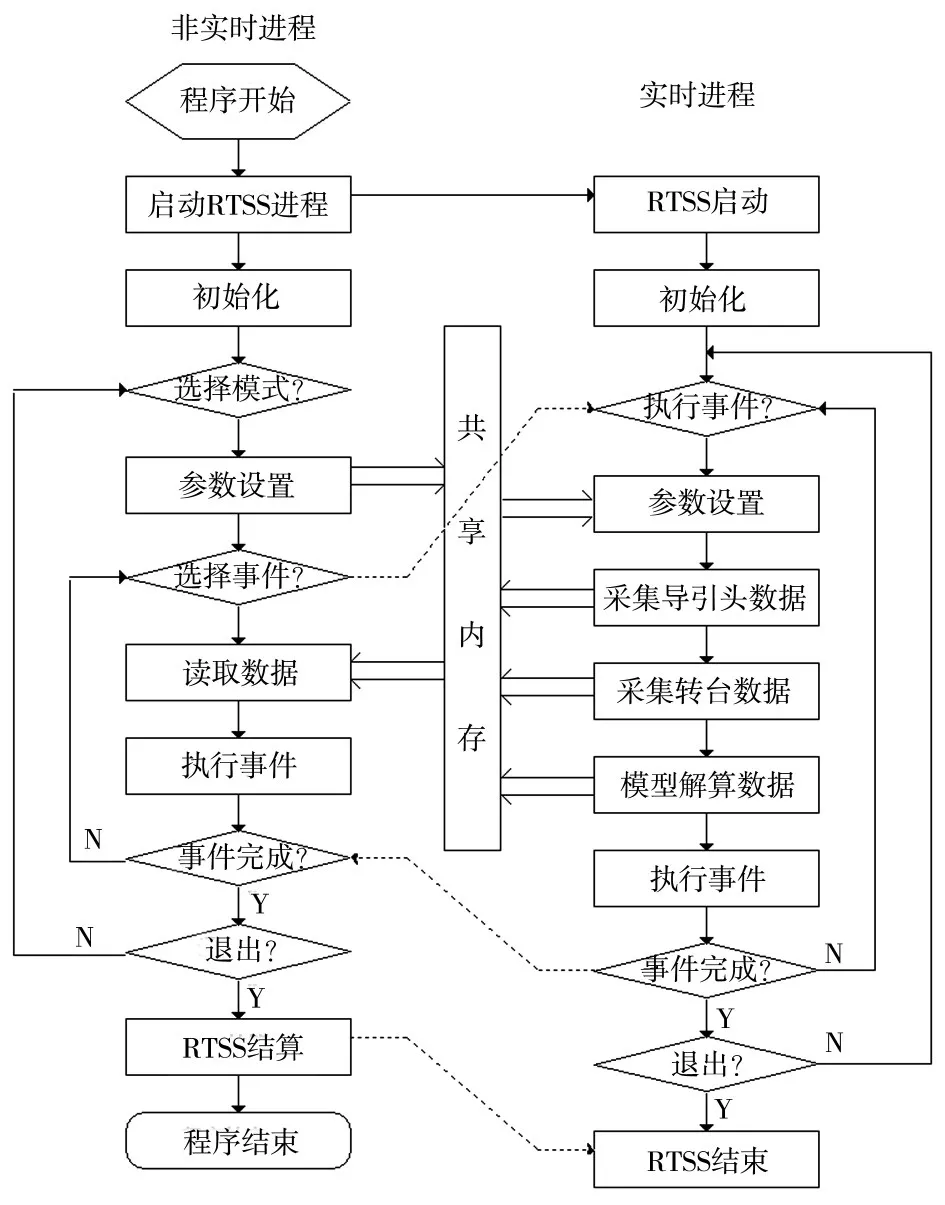
图10 Windows进程与RTSS进程间通信
3.3 主控系统主界面
主控软件模块的中心任务是对试验过程和飞行仿真模拟流程节点进行管理,对测试数据显示,如弹道轨迹、坐标信息、姿态信息、视线信息等。
主控系统主界面设计分为四个部分,分别是:用户操作、图像显示、曲线显示以及具体数据显示。主控系统主界面如图11所示:
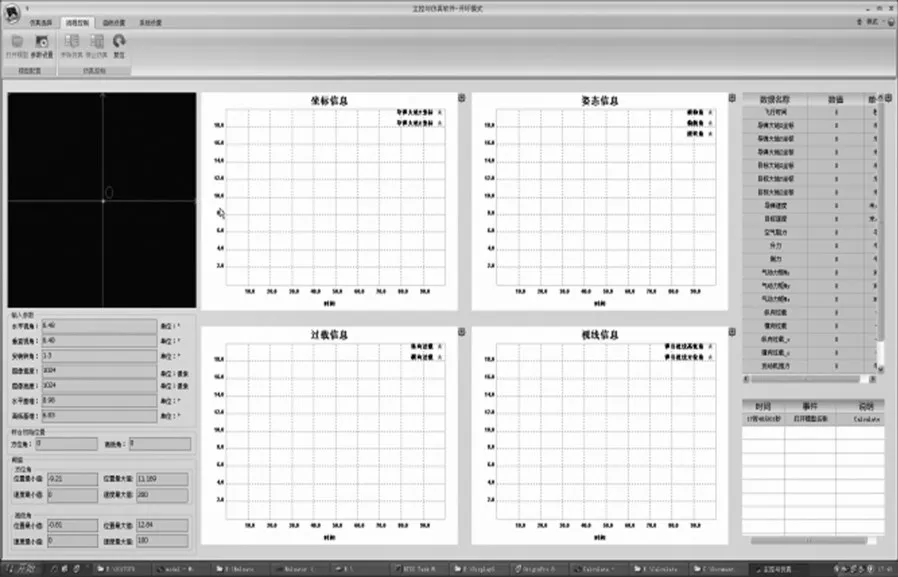
图11 主控软件界面
指令模块栏采用Metro风格,点击不同的功能标签可以切换系统提供的各种功能。
4 结果分析与结论
激光制导半实物仿真主控系统可以实现流程控制、实现测试数据的采集、保存和显示和处理功能。
测试主控系统功能通过闭环仿真实验进行,闭环仿真试验主要实现导弹攻击目标的全过程仿真。闭环仿真实验中验证了主控系统完成了预期的功能要求。具体实现过程如下:
1.流程控制功能,主要包括打开模型、参数设置、开始仿真、停止仿真和复位,具体见图12左上角。
2.对测试数据的采集及显示,测试数据主要包括导引头方位信息、导弹弹道解算出的弹道数据及转台运动数据。具体见图12。
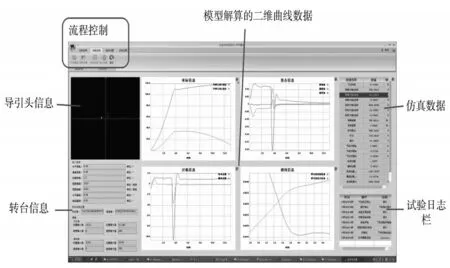
图12 闭环仿真试验图
3.闭环仿真实验结果保存,在闭环试验中需要保存的数据包括转台的运动数据(如图13)、弹道数据等。弹道数据保存的文件类型为.RTSS文件,可通过第三方软件DisplaySimuData.exe工具进行转换提取后导入Origin中进行数据分析,导出的数据如图14所示。
通过半实物仿真系统的闭环仿真实验,验证了主控系统完成了预期的功能。

图13 转台追踪性能数据记录文件
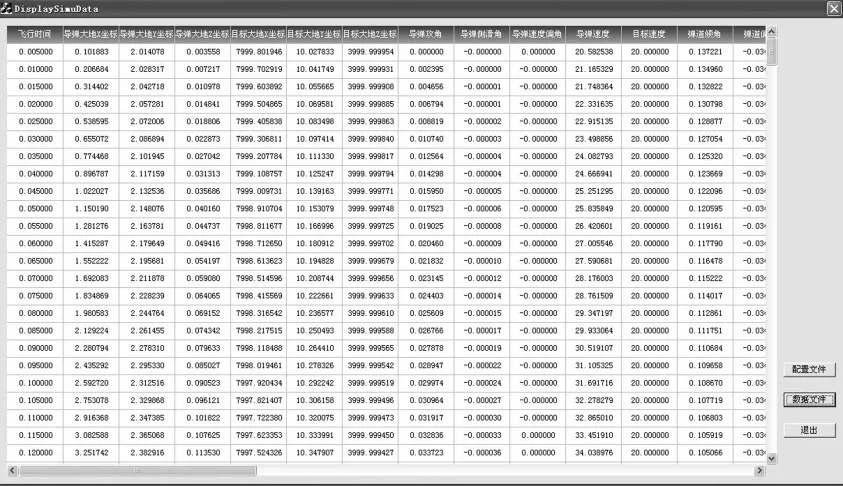
图14 导弹弹道解算出的弹道数据
