高速铁路长大隧道独立控制网建网技术研究
2018-08-29杜志刚
杜志刚 徐 辉
(中铁隧道局集团有限公司,河南洛阳 471009)
《铁路隧道设计规范》(TB10003—2016)中依据长度将隧道划分为:短隧道(L≤500 m)、中长隧道(500 m
杨柳、左智刚探索了改变投影基准面和中央子线减弱控制网边长变形值的方法,采用一点一方向的方法建立隧道独立控制网[3];叶昌尧研究了特长隧道固定一点一方位布设独立控制网,并采用控制网旋转的方法解决衔接段横向偏差[4];杨雪峰、刘成龙采用两种方法对长大隧道群独立控制网方向角进行验算分析,以一点一方向的方法建立长大隧道群独立控制网[5];洪江华、石德斌等对长大隧道平面GPS网的布设、观测方案、精度评定和贯通误差进行了研究[6];这些研究成果对提高长大隧道洞外控制网的贯通精度具有一定实用意义,然而采用一点一方向方法建立的隧道独立控制网往往会导致横向偏差较大和长短链。其在路基段时容易处理,而桥隧相连时较难消除。
本文的研究思路为:在原参考椭球基准和既有线路控制点成果的基础上,以隧道工程中心经线为坐标投影的中央子午线(L0),以隧道平均轨面高程为投影大地高(H0),将既有平面控制点分别换带转换至独立控制网坐标系(L0、H0),对起算点稳定性和可靠性进行分析,选取隧道进口、出口各一个稳定可靠的控制点为起算点进行整体平差,在新投影参数(L0、H0)基准下建立隧道独立控制网。采用本方法建立的隧道独立控制网能有效解决长短链和横向偏差,不需要旋转或设置长短链等后处理措施,可确保隧道与相邻结构物顺利衔接。
1 建立长大隧道独立控制网的必要性
1.1 控制投影长度变形值
投影长度变形值是指实测长度经过两化改正后与坐标反算值的不符值[7],在施工测量过程中,为了保证施工控制网中相邻点位之间的相对精度,需要把投影长度变形值控制在一定范围内。铁路工程控制网是狭长的带状网,其投影长度变形值受所在点高程、投影面高程和中央子午线等因素影响[8],为了提高铁路控制网中相邻点相对精度,控制投影长度变形值,《高速铁路工程测量规范》(TB10601—2009)中规定“在对应线路轨面设计高程面上坐标系统的投影长度变形值不宜大于10 mm/km”。
1.2 隧道贯通需要
隧道贯通误差从空间分布上可分为纵向、横向和高程贯通误差。高程贯通误差可以通过精密水准测量技术控制,纵向贯通误差只对距离(或里程)有影响,而横向贯通误差对隧道质量有直接影响,一旦隧道贯通面偏差过大,很难通过技术手段予以纠正,通常需要对已衬砌段(或仰拱段)进行二次施工,造成巨大经济损失。隧道独立控制网一般一次建网,覆盖各个施工工区,控制点精度高、进洞边方位精准且整网误差均匀,有利于施工测量引测和校核。
1.3 施工测量需要
长大隧道除主隧道进口、出口外,往往有斜井、横洞或平行导洞等辅助坑道,一般地形较复杂,常常跨越几个工程坐标系,对于不同工程坐标系,控制点往往需要换带计算,易出错。因此,需要建立统一的独立坐标系。《高速铁路工程测量规范》(TB10601—2009)中规定“当隧道洞口两端线路平面控制网(CPⅠ、CPⅡ)不在一个投影带内时,可建立独立的隧道施工控制网”。
2 “二点法”建立长大隧道独立控制网
一般采用隧道工程中心经线为坐标投影中央子午线,采用隧道轨面平均高程为投影大地高,将既有平面控制点分别换带计算转换至隧道独立控制网坐标系,进行既有控制点稳定性和可靠性分析后,选取隧道进口、出口各一个控制点为起算点,在独立控制网坐标系下进行整体平差,建立长大隧道独立控制网。“二点法”建网步骤如下:
(1)选点和网形设计。结合各隧道施工作业区的地形特点、地质情况、交通状况和原有平面控制点,在各个隧道施工作业区进行桩点选址与埋设,每个施工工区埋设3~4个平面控制桩。
(2)选取投影参数。取隧道工程中心经度为坐标投影的中央子午线(LO),取隧道平均轨面高程为投影大地高(H0)。
(3)起算点坐标换带计算。将既有平面控制点换带转换至隧道独立控制网坐标系(L0、H0)。
(4)对隧道GPS网进行闭合环、重复基线检验和三维无约束网平差,满足限差要求后,进行起算点稳定性和可靠性分析,之后选取隧道进口、出口各一个控制点作为起算点,在新投影基准下进行整体平差,建立隧道独立控制网。
(5)对所建独立控制网进行边长和角度检测,评估独立控制网的精度。
3 独立控制网建网案例
3.1 工程概况
某铁路武陵山隧道(双线单洞)位于湖南省张家界市慈利县境内,起止里程为DK234+491.2~DK243+535.3,呈东西走向,长9.044 km。该隧道地处武陵山中低山区,海拔550~800 m。该隧道仅设置一个施工平导,位于隧道进口,与隧道正洞交于DK235+460。隧道进口轨面高程389.442 m,出口轨面高程458.9082 m,平面位置介于110°45′~110°51′范围内。洞身纵坡为:17.4‰/8.8 m、17.5‰/4950 m、6‰/600 m、-6‰/3485.3 m。DK240+365.634~DK241+562.069位于R=7 000的曲线上,DK242+754.763至出口位于R=4 500的曲线上,其余均位于直线段上。
武陵山隧道既有平面控制点4个(与高程共点),隧道进口2个(CPⅠ163和CPⅠ164),隧道出口2个(CPⅠ165和CPⅠ166),均为高铁二等标准,控制点周围无遮挡,土质坚硬,保存完好。该隧道参考椭球与整个线路一致,均采用2000国家大地坐标系基本椭球参数(长半轴a=6 378 137 m,扁率α=1/298.257 222 101),跨越2个工程坐标系,见表1。

表1 武陵山隧道施工坐标系
3.2 网形设计
由洞口子网和其他子网相互联系组成主网,洞口子网布设成大地四边形。新埋控制点布设在视野开阔、通视良好、土质坚实、不易破坏的地方。既有控制点均纳入隧道独立控制网中,见图1。
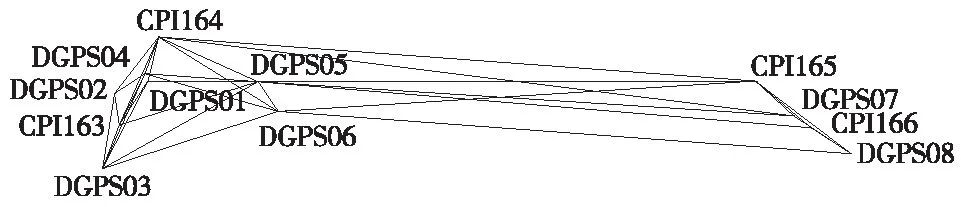
图1 武陵山隧道控制点分布
3.3 建网精度等级
根据《高速铁路工程测量规范》(TB10601—2009)规定,按照高铁一等GPS网精度建立武陵山隧道独立控制网,具体精度控制指标见表2和表3。
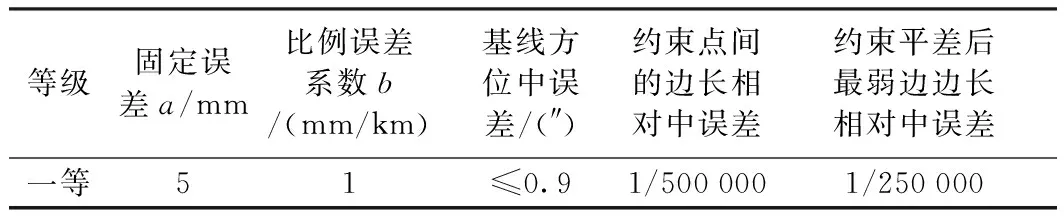
表2 平面控制网精度要求[2]
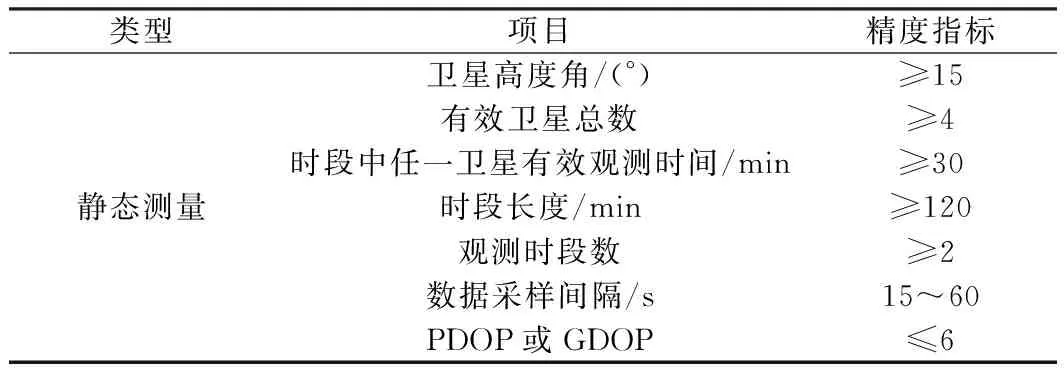
表3 GPS测量作业的基本技术要求[2]
3.4 投影参数选取
武陵山隧道呈“人”字坡,平面经度位置介于110°45′~110°51′,轨面高程介于389~479 m。取平均经线110°48′为独立坐标系投影中央子午线,取平均高程面434 m为投影大地高。
3.5 起算点坐标换带计算
以原参考椭球为参照,将隧道进口端CPⅠ163、CPⅠ164(110°45',315 m),出口端CPⅠ165、CPⅠ166(110°50',375 m)分别换带转换[9]至武陵山隧道独立坐标系(L0=110°48′,H0=434 m)。
3.6 基线解算与三维无约束平差
独立控制网数据处理包括基线向量解算和网平差。基线向量解算采用GPS随机后处理商用软件,卫星星历统一采用广播星历[10],任一时段同步观测时间不小于120 min,任一时段有效卫星数不少于4颗,计算同一时段观测值的资料剔除率小于10%[2],解算完成后导出asc基线向量文件。网平差时将asc基线向量文件导入数据后处理软件,首先对独立基线环和重复基线进行计算,检查确认所有独立闭合环闭合差和重复基线较差在规范限差之内,选取网中既有控制点CPⅠ165的三维空间直角坐标为起算点进行无约束平差,确认三维基线向量残差在规范限差之内。
3.7 起算点相对稳定性检查
在武陵山隧道进口、出口各选择1~2个CPⅠ点,本次选择CPⅠ164、CPⅠ165和CPⅠ166,其中CPⅠ164位于隧道进口,CPⅠ165和CPⅠ166位于隧道出口。考虑到点位分布情况(见图1),CPⅠ164、CPⅠ166用于分析方位不符值和边长相对精度(点间距8 518.550 1 m), CPⅠ165与CPⅠ166距离较近(点间距903.449 1 m),CPⅠ165作为辅助点,仅进行方位较差分析。将CPⅠ164、CPⅠ165、CPⅠ166三维无约束平差计算所得到的平面坐标(L0=110°48′,H0=434 m)与换带转换成果进行对比分析,计算相邻点间的边长、方位和夹角,并进行对比分析,判定三个平面控制点的相对点位稳定性和可靠性。
3.8 “二点法”约束平差
以CPⅠ164、CPⅠ166为起算点,以隧道独立坐标系L0=110°48′和H0=434 m为参数进行约束平差,平差后最弱边DGPS05—DGPS06的基线边方位角中误差MA=0.83″,边长相对中误差MS=0.17 cm,相对精度为1/259 648(即3.851×10-6,边长相对中误差<1/250 000),满足规范中高铁一等GPS网的精度要求。
3.9 独立控制网可靠性分析
为了检验独立控制网的可靠性[11],在武陵山隧道各个施工工区(隧道进口、出口和平导)子网中分别选择一个三角形进行角度和距离检查,检测数据见表4和表5。

表4 全站仪实测边长与GPS边长比较

表5 全站仪实测方位与GPS比较
由表4可知,独立控制网最大投影长度变形值为4.96 mm/km,满足高铁规范中不宜大于10 mm/km的要求。由表5可知,全站仪测量方位与GPS反算方位的最大较差为1.4″,全站仪检测数据与GPS数据吻合程度较好,武陵山隧道独立控制网可靠性满足要求。
4 与一点一方向建网方法对比分析
为了便于对比分析,以相同基线文件、起算点和投影参数,采用一点一方向建立武陵山隧道独立控制网。以CPⅠ164为起算点,CPⅠ166为方向点,方位θ=125°18′22.92″,中央子午线L0=110°48′,大地高H0=434 m。一点一方向平差后[12],最弱边DGPS05—DGPS06的基线边方位中误差MA=0.74″,边长相对中误差MS=0.15 cm,相对精度为1/294 772(相对中误差<1/250 000),满足规范中高铁一等GPS网的精度要求,其坐标较差见表6。
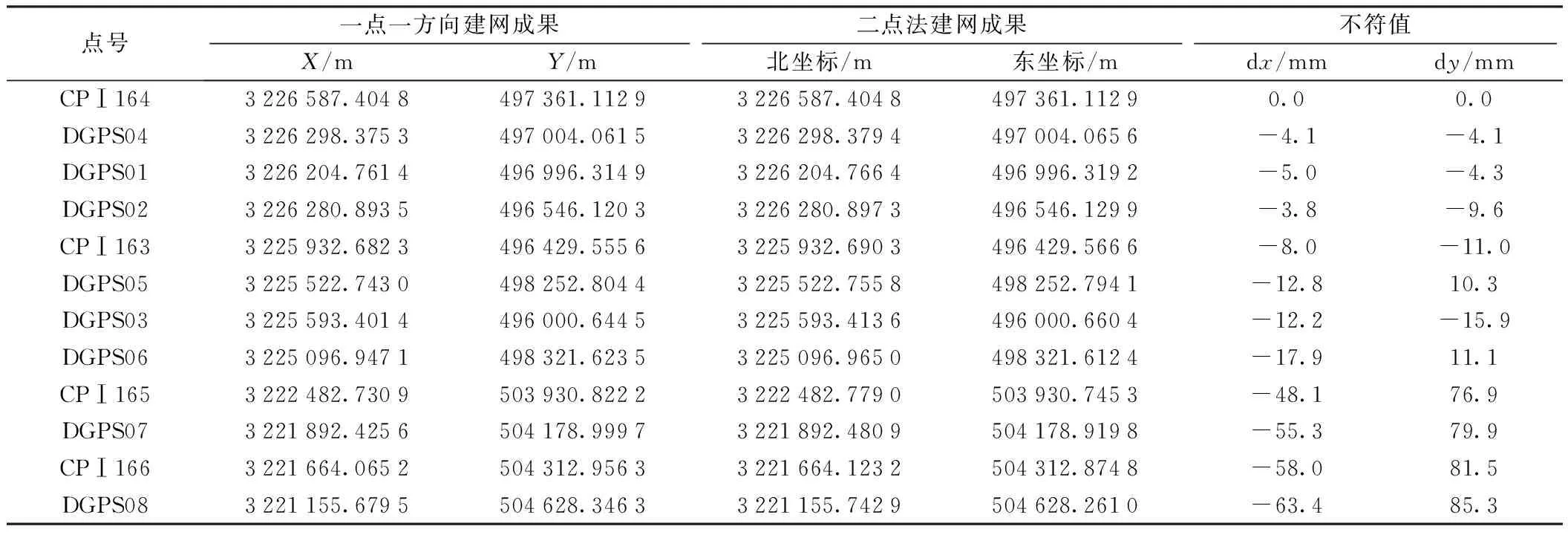
表6 控制点较差统计

图2 方位对坐标较差影响
5 横向贯通误差预计分析
隧道洞外控制网对横向贯通误差的影响与进洞点点位误差、进洞边方位误差、进洞点和贯通点连线与贯通点线路切线的夹角等有关[14]。洞外控制网建立后,应通过《高速铁路工程测量规范》(TB10601—2009)中的贯通误差预计公式进行计算,以验证洞外控制网的精度是否满足贯通测量的需要。
式中σΔx、σΔy、σΔxΔy——由进、出口推算至贯通点的x,y坐标差的方差和协方差;
αF——贯通面方位。
武陵山隧道长9.044 km,从进口、平导和出口等作业面分别施工,平导位于隧道进口,与隧道正洞交于进口1 km处,因此将其纳入隧道进口考虑。预计隧道进口、出口各单方向掘进约4.5 km,取隧道中部DK239+013为预计贯通面,隧道进口进洞点为DGPS02,定向点为DGPS03。隧道出口进洞点为DGPS07,定向点为CPⅠ165,隧道横向贯通误差预计[15]见表7。
武陵山隧道横向贯通误差估计值为10.1 mm,小于《高速铁路工程测量规范》(TB10601—2009)中7 km≤L<10 km时洞外贯通中误差值45 mm[2],满足要求。

表7 武陵山隧道横向贯通测量预计
6 结论
“二点法”既能获得足够精度,满足隧道贯通要求,又可有效解决横向偏差较大和长短链等问题,不需要进行控制网旋转等后处理措施,能确保隧道与相邻结构物的顺利衔接。
