一种多功能的行车辅助系统
2018-08-29杜金枝王文贤
杜金枝,王文贤
(奇瑞汽车股份有限公司,安徽 芜湖 241009)
引言
目前汽车的全景、夜视、行车记录各种系统均各自独立运作,消费者若需较完整的行车辅助设计,则需要分解加装且有不同功能的辅助设计,费时费事,且如果发生事故时,仅能从上述设计模块各自读取数据来分析,无法提供一套完整详细的分析,甚至还原现场情况。
1 总体设计
本设计基于上述技术问题设计一种新型的行车辅助系统,可记录行车路径与车体定位信息,并提供全景影像、夜视功能,以全面性地提高行车安全。该装置图1所示包括:装置控制器、四个图像采集器(三个彩色摄像头,一个红外摄像头)、红外摄像灯、显示器、全球定位器、行车记录器、数据存储器(SD卡或硬盘)。装置控制器接收并处理来自图像采集器的影响讯号,而产生影像数据至显示,以提供驾驶者的道路信息,达到行车辅助的功能。控制器采用DSP芯片TMS320DM642包括4路视频输入端口,接收和处理标准 PAL或者NTSC模拟视频输入,主频600MHZ能够有效提高整个系统的性能。分别安装于车体左、右两侧的后视镜下和后保险杠中部。在前保险杠中间位置安装红外摄像头。三个彩色摄像头分别对不同视角环境进行采集,摄像头两两之间有交叉覆盖,4个摄像头的总覆盖区域在水平方向上覆盖车体左、右、前后区域。显示器连接装置控制器,用于接收并显示影像。红外照射灯包括红外发光二极管和抛物面反光镜,用于发出特定波长的红外光。全球定位器用于取得车体的经纬度及时间信息,为一卫星定位装置(GPS)。行车记录器用于记录图像采集器产生的影像,以及记录所述经纬度及时间信息。数据存储器可存储影像数据、处理过的画面数据或该车体的定位信息,只要存储位置空间足够,即可一直存储。
本设计的行车辅助系统亦可具有提供全景影像的功能,通过车身上的四个摄像头实时读取车身周围的有效取像,控制器处理读取到的图像信息,并将拼接好的图像实时在车载显示屏上显示,驾驶员从而清楚地看清楚车身周围两米范围内的环境信息。特别是能看清楚车身左右侧的盲区。如图 1所示,三个彩色摄像头分别为1、2、3、一个红外摄像头4,控制器外接的存储器用于存储4个摄像头获取的实时图像以及经控制器处理后的全景图像。全景摄像头的前、左、右采用120度广角摄像头,后视采用170度广角频摄像头。采用数字图像处理算法实时处理四路视频图像,首先利用边缘检测算法把具有相同边缘亮点的同一物体进行融合处理,有效避免了重影现象,然后与预存在处理器内的车体模型进行视频拼接、融合处理、实时补偿图像。周围图像经过拼接处理后,驾驶员能够清楚地看清车身周围左右两米以内以及车尾左右侧的盲区。通过控制器的控制,还可以放大区域显示其中任何某一个方位的影像,例当打左转向灯时,则放大左侧视频的显示区域的影像,右视模式和后视模式不变,即其它三个视频窗口的大小不变;当打右侧转向灯时,则单独放大右侧视频的显示区域,左视模式和后视显示模式不变。当打开夜视功能时,单独放大前视频的显示区域。
本设计的行车辅助系统亦可具有提供红外夜视显示功能,在前侧2个雾灯的旁边各安装一个红外摄像头,每个红外灯因只允许850mm~1100mm的红外光及小部分可见光通过,因此可以有效抑制地面强光的影响,有效解决了眩光问题。两个红外补光灯照射距离最远可以达到 150米,并可以采集到人肉眼看不见前方路面状态,所以不会对相向而行的驾驶员或行人造成炫目。红外摄像头采用灵敏度高、分辨率强、抗强光、体积小、寿命长、抗震动、抗磁场等优点的CCD摄像头。启动夜视功能后,DSP读取红外摄像头采集到的图像信息,同时对暗光进行图像增强和强光弱化算法,并在显示器上实时显示处理后的图像。全景图像、夜视图像、倒车图像,各模式之间可以进行切换,并将当前模式在显示器上显示。
本设计的行车辅助系统亦可具有提供行车记录功能,全球定位器为一卫星定位装置(GPS),用以取得车体所在位置的经纬度及时间信息,行车记录器记录DSP或图像采集器产生的影像,以及记录全球定位器获得的影像所在位置的经纬度及时间信息,且该卫星定位装置还包括一地理信息装置,除了用于利用卫星定位装置的多个车体当时的经纬度与时间信息,来生成行车路径数据外,亦连接DSP处理器与图像采集器以取得影像数据,来作进一步的分析,如发生事故时,可还原现场情况,来理清肇事责任;或是配合地理信息装置所提供的地理模型,将行车路径数据绘制于地址模型上,并输出至显示器供驾驶者参考,甚至配合影像数据来做更完整的分析;数据存储器可存储影像数据、处理过的画面数据或该车体的定位信息,只要存储位置空间足够,即可一直存储,达到长时间连续储存不中断的功能,并且提供驾驶着日后查阅或分析的功能。该功能在引擎启动时启动记录功能,以实时储存影像、定位或路径等信息,保障驾驶者安全。
2 设计效果
本设计系统安装在奇瑞G5车进行开发验证,夜视效果对比图见图2,360全景效果图见图3。
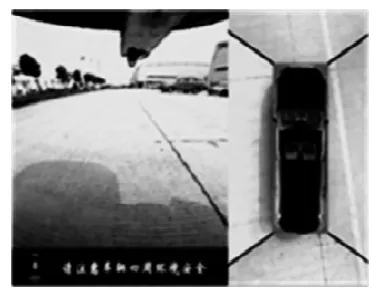
图3 360度全景效果
测试结果表明,装了夜视系统的汽车,在黑暗环境中能见度和清晰度有明显提升,360度全景图像实现很好的拼接效果,实现车辆周围2米内环境的实时显示,行车记录功能能够实时储存影像、定位或路径等信息,极大程度上提高了驾乘人员的驾驶安全性。
3 结束语
实验证明,使用本设计,可根据车体的行车状态(如前进、左转、右转、倒车等)而提供不同的辅助功能,包含全景影像辅助、夜视辅助、影像储存记录、车体定位信息或行车路径信息等,且该行车处理器可于引擎启动时即启动记录功能,实时储存影像、定位或路径等信息,可提供驾驶者最适合的道路信息,以全面性地提升行车安全。
