毫米波雷达识别问题分析及解决措施
2018-08-28杨航高源
杨航 高源
(东风汽车公司技术中心,武汉 430058)
主题词:毫米波雷达 感知识别 虚警 滤波
1 前言
近年来,随着人工智能的兴起无人驾驶汽车获得了越来越多的关注,而无人驾驶车辆想要真正上路行驶,最关键的技术在于精确掌握现实中复杂的交通状况,这样一来就必须使用雷达装置。由于毫米波雷达相对于摄像头及激光雷达,其感知特性具有距离远、可靠性高、不受光线及尘埃影响等特点[1],特别是不会受恶劣天气的影响并且能够全天候工作,因此是无人驾驶技术的最佳选择。毫米波雷达是利用目标对电磁波的反射来发现并测定目标位置,而充满杂波的外部环境给毫米波雷达感知带来无法避免的虚警问题。为此,本文针对L3级自动驾驶样车所配备的77 GHz长距毫米波雷达和中距毫米波雷达在感知识别中的主要问题进行了分析并提出了解决对策,为后续毫米波雷达的应用和测试提供参考。
2 毫米波雷达识别问题解析
2.1 毫米波雷达工作原理
L3级自动驾驶样车车身周围布置了2枚长距毫米波雷达和4枚中距毫米波雷达,可实现车身360°环境感知范围覆盖。毫米波雷达系统整车布置方案及探测范围如图1所示。

图1 毫米波雷达系统整车布置示意
毫米波雷达通过CAN信号与自动驾驶控制器进行交互(图2),将其感知结果输入至下一级规划控制模块,其输出参数如表1和表2所列。

图2 毫米雷达系统网络架构示意

表1 长距毫米波雷达输出参数

表2 中距毫米波雷达输出参数
由表1和表2可知,相对其它传感器(如视觉传感器、激光雷达传感器),毫米波雷达具有速度精度较高、角分辨率相对较低等特点。由于中距雷达、长距雷达的短距模式角度覆盖范围相对更大,其角分辨率进一步下降。
2.2 毫米波雷达识别目标虚警干扰问题
2.2.1 问题描述
在长距毫米波雷达使用过程中,发现前长距雷达有大量虚警信号出现。通过观察发现,第1类虚警信号通常与金属护栏信号同时出现,为一系列连续点,其回波点相对车辆的距离与护栏回波点相对车辆的距离接近,夹角相对护栏回波点偏右,特征是由远及近、从右向左穿过车辆所在点上的水平轴,在接近车辆的过程中突然消失,其与车的相对速度与道路护栏与车的相对速度一致(图3中虚线圆圈);第2类虚警信号通常与车辆同时出现,车辆虚警信号的目标距离与目标车辆回波点接近,方位角相对目标车辆回波点偏右,其相对速度与目标车辆一致(图3中实线圆圈),而后置长距毫米波雷达图像中没有出现这些虚警信号。将前、后毫米波雷达调换后重新在该路段进行了测试,发现虚警信号依然存在,预测是车辆前、后保险杠不同所导致。将前保险杠拆除后再次在该路段进行了测试,发现两种虚警信号均消失。但在拆除保险杠后发现了第3类虚警信号(图4),此类虚警信号在车辆静止时不出现,行车过程中出现目标跳动,目标距离一般在3~15 m,方位角为0度,相对速度一般与车速接近,且具有闪动的特点(非持续目标)。

图3 试验场景及第1、2类虚警

图4 试验场景及第3类虚警信号示意
2.2.2 原因解析
通过对样车进行分析发现,该样车前保险杠油漆的材质为金属漆,其中包含的金属颗粒对前向雷达发射和接收的电磁波产生了折射、反射干扰,从而导致前向雷达接收的同一目标在多个方位产生回波,错误判定为多个目标,因而造成了第1类和第2类虚警信号。
第3类虚警信号与前保险杠无关,是车辆颠簸过程中其姿态俯仰角发生变化导致前向毫米波雷达将来自路面的回波作为目标输出。但第3类虚警回波距离固定(对于某一个确定的虚警信号),方位角固定为0,持续时间短,因此考虑利用条件判断进行筛选去除[2]。
2.2.3 解决措施
针对第1类和第2类虚警问题,采取将遮挡雷达的保险杠金属漆换为非金属漆的解决措施;针对第3类虚警问题,采取修改雷达信号读取程序,增加前后帧滤波判定,将断续出现在路面中间的闪现目标过滤的措施,滤波算法流程如图5所示。

图5 滤波算法流程
第1、2类虚警问题实施解决措施后效果对比如图6所示。

图6 第1、2类虚警问题解决前、后效果对比
3 毫米波雷达目标提取问题解析
3.1 问题描述
中距雷达模块本身不支持目标跟踪(Tracking)和提取功能。在使用过程中发现,目标回波与地面杂波及目标跳变杂波混杂,如直接将其原始数据作为感知结果直接输入后续规划控制模块,环境感知结果并不稳定、准确,容易造成对后续规划模块的扰动,如图7所示。
3.2 原因解析
中距毫米波雷达角分辨率相对较低,其无法返回物体的宽度信息。对于长条、连续出现的障碍物,中距毫米波雷达将识别为多个回波点并输出。根据毫米波雷达感知特性,真实存在的障碍物周围回波密度及回波出现概率高。

图7 后侧中距雷达实测路测栏杆识别结果
3.3 解决措施
使用聚类算法对原始数据进行处理[3],录制视频和原始数据包,同时运行实施聚类算法前和实施聚类算法后的程序,验证算法是否能够有效提取目标参数。拟采用的滤波算法流程如图8所示,实施聚类算法前、后的探测结果对比如图9所示。
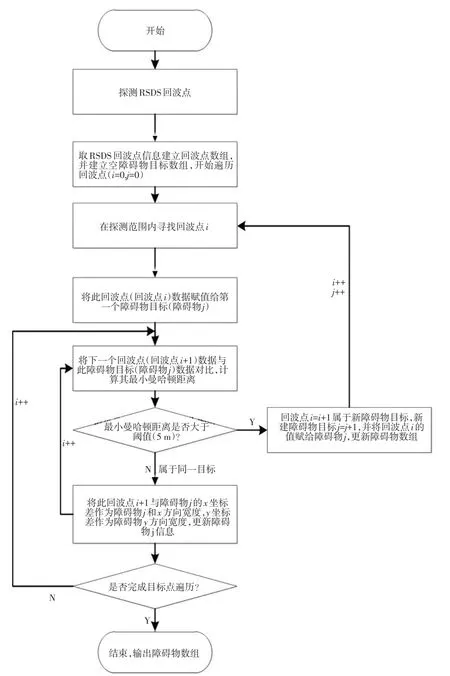
图8 中距毫米波雷达聚类算法流程
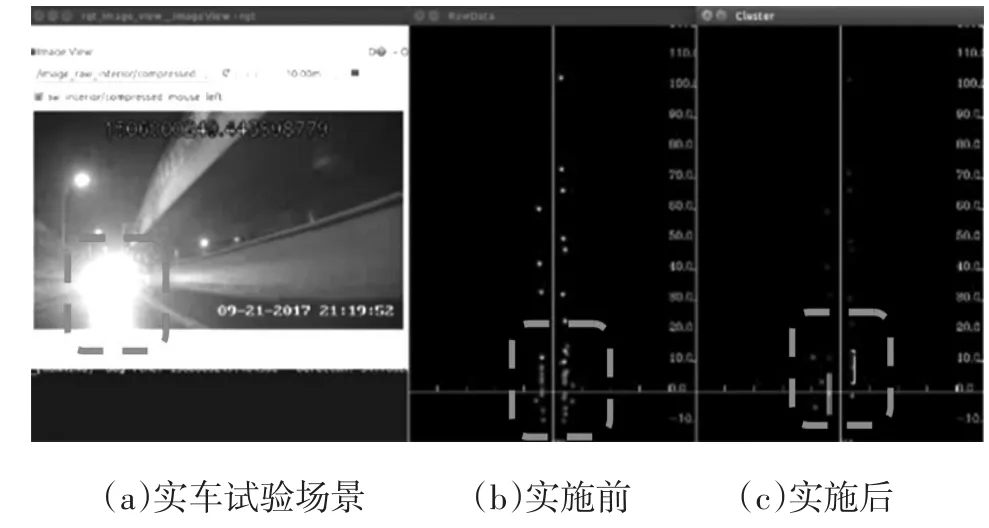
图9 中距毫米波雷达聚类算法实施前、后对比
从图9可看出,通过聚类,从毫米波的点云数据中可以准确提取障碍物的轮廓信息,并获知后方来车的情况。
与长距毫米波雷达相比,在功率相同的条件下,中距毫米波雷达因其检测角度大,分辨率相对更低,虚警和杂波问题相对更为严重。对于直接输出Raw-Data数据的雷达,需要在开发过程中根据应用场景,结合车速、布置等自行进行目标提取;对于中距雷达信号,可采用聚类算法并结合车速及探测范围进行目标提取。后续可对聚类算法进行优化,并加入前、后帧滤波追踪算法,以获得更可靠、稳定的目标识别性能。
4 结束语
通过对两类典型毫米波雷达识别问题的解析可知,在毫米波雷达与整车系统的适配过程中,需要重点解决两类问题,一是由于毫米波雷达于车身集成,需考量车身材质对其回波的干扰;二是解决虚警和杂波问题,需要结合历史数据和全局数据对目标进行滤波和提取操作,使毫米波雷达的感知结果更加接近实际环境。
