网络RTK虚拟参考站的数学模型研究∗
2018-08-28邢旺
邢 旺
(92941部队 葫芦岛 125000)
1 引言
RTK定位技术是基于载波相位观测值的实时动态差分定位技术,因其精度高、实时性和高效性,使得其在城市测绘中的应用越来越广。用RTK系统进行测量工作时,必须首先在测量区域附近建立一个基准站,流动站才能在基准站的有效范围内通过接收卫星信号和基准站数据进行差分获得该点的坐标。当流动站离基准站较远时,由于两站间的误差相关性减小,残余的卫星轨道误差,电离层延迟,对流层延迟等偏差对相对定位的影响增加,从而使常规(即单基准站)RTK的定位精度降低。为解决这一问题,网络RTK技术应运而生。网络RTK是指在一个较大的区域内能稀疏地、较均匀地布设多个参考站(一般为三个或三个以上),构成一个参考站网,并以这些参考站中的一个或多个为基准,计算和发播改正信息,对该地区内的用户进行实时改正的定位方式。与常规RTK相比,该方法的主要优点为覆盖面广,定位精度高,可靠性高,可实时提供厘米级定位,而虚拟参考站法是网络RTK中一种很有发展前途的方法[1~2]。
2 虚拟参考站法原理
在虚拟参考站技术中,需要用到流动站的概略坐标,流动站首先根据伪距观测值和广播星历进行单点定位,将定位结果作为流动站的概略坐标实时传递给数据处理中心,数据处理中心在该概略坐标处建立一个虚拟参考站。由于单点定位的精度所限,流动站真实坐标和虚拟参考站坐标之间的差距可能在几米到几十米,因此建立虚拟参考站后,流动站就可结合虚拟参考站利用常规RTK技术进行实时载波相位差分,以获得高精度的定位结果。对于高动态用户或者活动范围较大的流动用户而言,流动站与初始虚拟参考站的实际距离会随着流动站的运动而增大,仍然会产生系统误差相关性减弱的现象,此时残余的误差也将增大,从而增加解算整周模糊度的难度以及影响流动站和虚拟参考站间基线的定位精度,因此虚拟参考站也要沿着流动站运动轨迹运动[3~4]。
3 误差分析
GPS测量中出现的各种误差按来源可分以下四种:
1)与GPS卫星有关的误差:卫星星历误差、卫星钟差;
2)与信号传播有关的误差:对流层折射、电离层折射、多路径效应;
3)与接收机有关误差:接收机噪音、天线相位中心偏差、内时延误差、接收机钟差;
4)其它误差:地球旋转影响、地球固体潮影响、地面基准误差。
在上述这些误差中,相对论效应、地球旋转影响、地球固体潮影响和地面基准误差等经过误差模型改正后对虚拟参考站测量的影响可以忽略不计;卫星钟差经过卫星广播星历改正后,再通过差分改正基本可以消除;接收机钟差通过星际差分则可以消除;接收机噪音、天线相位中心偏差与接收机自身有关,不同的接收机噪音大小不同,天线相位中心偏差以及内时延误差也与接收机构造有关;轨道误差主要取决卫星星历误差,其误差主要源于GPS卫星轨道摄动的复杂性和不稳定性,轨道偏差具有空间相关性,通过距离相关内插后可以大大减小,因此电离层偏差、对流层偏差和多路径效应就成为GPS测量中的三大偏差,电离层偏差和对流层偏差也具有很强的空间相关性,经过模型改正后,通过差分也可以得以很好的消除。多路径效应引起的误差随着反射物距离的增加衰减地很快,这使得多路径效应测站相关性很弱,很难利用站间差分的方法消除,目前对多路径效应的改正常采用四种方法:测量环境上尽量避开造成多路径效应的地方、硬件设计上力求避免、软件模型改正、数据后处理方法[5~6]。
4 数学模型分析
由于网络RTK中存在多个连续运行参考站,选择距离虚拟参考站最近的参考站为主参考站,先将其余参考站与距离相关的误差改正到主参考站上,再得出虚拟参考站上相关偏差改正。其模型原理如图1所示。
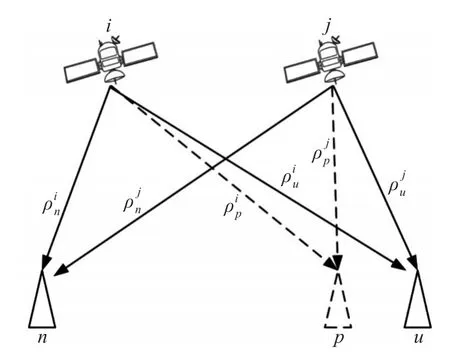
图1 虚拟参考站法原理图
n为选定的主参考站,u为流动站,p为虚拟参考站,则当只考虑电离层延迟和对流层延迟影响,不考虑其它系统误差的影响时,主参考站n的载波相位观测方程为

式(1)中,λ为载波相位波长,单位为米;ϕ为载波相位观测值,单位为周;ρ为星站间几何距离,单位为m;I为电离层延迟,单位为m;T为对流层延迟,单位为m;c为光速,单位为m/s,δtn为接收机钟差,单位为s;δti为卫星钟差,单位为秒;N为整周模糊度,单位为周。
同理可得出虚拟参考站p的载波相位观测方程为

则n与p的星间单差方程分别为

在站间再进行一次差分,则主参考站和虚拟参考站的双差方程为

由式(5)可以推出虚拟参考站载波相位星间单差观测方程为


由于虚拟参考站的坐标为流动站的概略坐标,即虚拟参考站距离流动站非常近,所以与距离相关的单差值基本相等,电离层延迟双差和对流层延迟双差近似为0,式(7)可以简化为

由式(8)可以看出,经过双差计算后,对流层延迟和电离层延迟已经消除,实际上还应考虑多路径效应和接收机噪声的偏差残差影响。一般情况下,多路径效应和接收机噪声经过改正差分后非常小,所以流动站已具有较高的定位精度[7~8]。
5 改正数算法
虚拟参考站法中,为了计算改正数,需要把所有参考站上与距离相关的偏差利用内插方法改正到虚拟参考站上。本文以线性内插法为例进行改正数的计算。假设有n个参考站,且参考站n距离用户最近,则选取n为主参考站,其余n-1个表示副参考站,p表示虚拟参考站,由线性内插法有[9~12]

式中Vpn表示主参考站n对虚拟参考站星间站间二次差分改正数,和表示虚拟参考站概略坐标和主参考站坐标的差矢量,a、b为网络系数,对于n-1个副参考站,将其距离相关误差改正到主参考站n上,有
当网络RTK参考站数目超过3个时,可采用最小二乘平差法求定a和b的值,为区分不同参考站对虚拟参考站的影响程度不同,引入权阵P,则有


由此可以得出虚拟参考站上距离相关偏差改正。
6 应用实例
由于静态定位的观测环境容易选择,且结果可与已知值进行比较,所以本文利用静态定位的方法评估网络RTK虚拟参考站法的定位精度,实验用测站分布如图2所示。其中,A、B、C为参考站,U为测量用的流动站。
流动站的坐标事先用精密星历解算(PPP)获取。实验数据的采样频率为1Hz,连续观测时间为3h。将录取的实验数据与事先测定的坐标值进行比较,结果如图3所示。
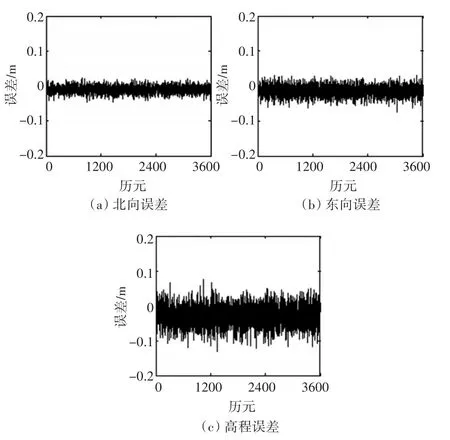
图3 各分量误差值
从图3可以看出,定位结果具有比较高的精度,结果中主要是随机噪声等非系统误差的影响,通过计算,可得北向、东向和高程误差的RMS值分别为1.4cm,2.1cm和4.2cm,定位精度为4.9cm,定位精度可达厘米级。
7 结语
网络RTK较常规RTK具有明显优势,本文分析了网络RTK中存在的各种误差,并对虚拟参考站法的数学模型进行了研究,讨论了模型中是如何消除各种误差以获取高精度定位观测值。探讨了双差改正数的计算方法,通过实验数据的采集与处理,验证了虚拟参考站法的高效性,为虚拟参考站法的理论研究提供了一定的参考。
