基于相控阵雷达波束扫描的目标测角误差分析
2018-08-28王晓楠
王晓楠
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
相控阵雷达进行目标跟踪时通常采用比幅测角方法。影响测角精度的因素很多,根据误差产生的来源和性质可分为目标引入误差、雷达跟踪误差、转换误差和传播误差,其中雷达跟踪误差包括热噪声误差、接收机幅相不一致误差、天线零深、多路径误差等。目标引入误差、转换误差和传播误差不在本文讨论范围内,以下仅针对雷达跟踪误差进行分析论述[1]。
1 相控阵雷达跟踪误差
1.1 热噪声误差(随机误差)
相控阵体制雷达采用相位扫描方式进行目标跟踪测量,相对于常规体制雷达机械闭环跟踪而言更加便捷。天线对准目标时,目标的差信号幅度为零,此时差信道输出为接收机噪声。热噪声引起的测角误差表示为:
(1)
(2)
式中:θ为半功率点波束宽度;Km为归一化斜率因子;σ为接收机噪声引起的归一化差信号误差;S/N为脉冲信噪比[2]。
1.2 接收相位不一致误差(系统误差)
和差相位不一致是指和路、方位差路和俯仰差路通道之间相位响应不一致,影响测角精度和测角极性。接收机相位不一致引起的测角误差表示为:
(3)
式中:Φ为比较器后的和、差两路相移差;Km为归一化斜率因子;Gn为天线误差方向图的零深;θ为天线和波束宽度[3]。
1.3 接收幅度不一致误差(系统误差)
接收幅度不一致误差是指测角时和、方位差和俯仰差通道之间幅度响应不一致导致的测角偏差,幅度不一致引起的测角误差表示为:
(4)
式中:KA为和差比较器前2路幅度不平衡值;θ为半功率点波束宽度[3]。
1.4 天线零深误差(系统误差)
差波束零深是由天线阵元及子阵之间的幅相不一致性引入的。天线零深带来的测角误差表示为:
(5)
式中:Gn为天线误差方向图的零深;Km为归一化斜率因子[4]。
1.5 多路径误差(随机误差)
多路径误差主要存在于仰角测量,在反射信号出现漫射现象时,方位上也受到多路径的影响。多路径误差引起的测角误差表示为:
(6)
式中:θ为半功率点波束宽度;ρ为表面反射系数;Km为归一化斜率因子;Gse为和主瓣峰值功率与镜像点差副瓣峰值功率比[3]。
2 波束扫描引入的测角误差分析
相控阵雷达在执行空域扫描和多目标跟踪任务时,其波束指向会偏离法线方向,此时雷达波束宽度θ展宽,归一化斜率因子Km下降,对热噪声误差、接收相位不一致误差、接收幅度不一致误差、天线零深误差和多路径误差等雷达跟踪误差均产生影响。
以简单的直线阵列为例,分析相控阵雷达在波束扫描时波束宽度和归一化斜率因子变化情况。等间距对称分布奇数直线阵列如图1所示。
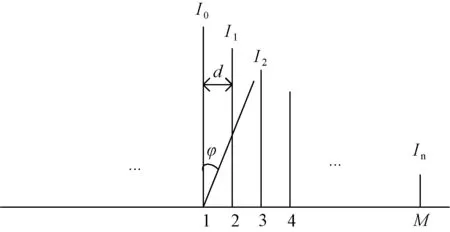
图1 等间距对称分布奇数直线阵列
2.1 波束扫描时波束宽度的变化
相控阵雷达波束扫描时,波束宽度可表示为:
(7)
式中:N为阵列单元数;d为阵列单元间距;θ为半功率点波束宽度;φ为扫描角。
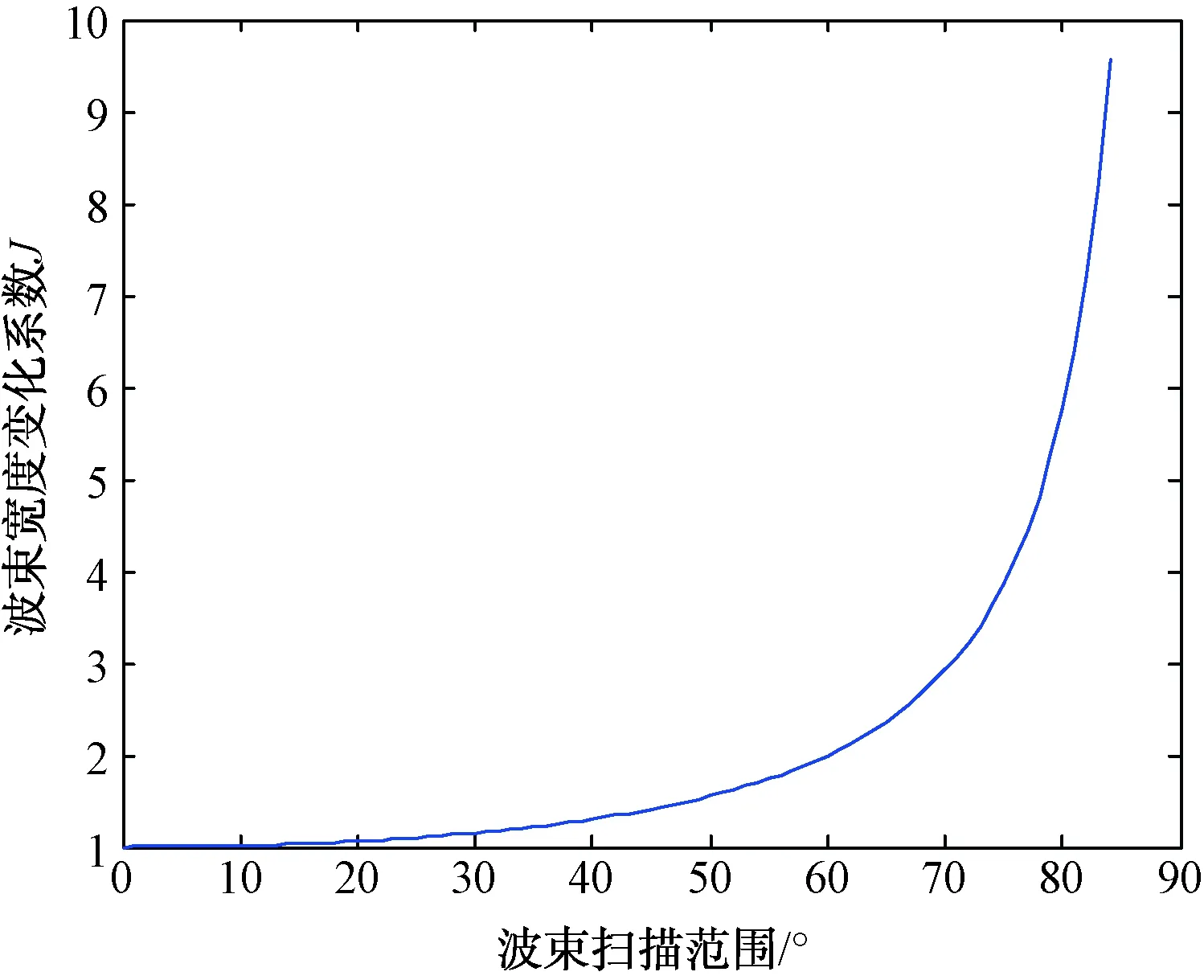
图2 波束扫描时波束宽度变化系数J仿真结果
2.2 波束扫描时归一化斜率因子的变化
等间距对称分布奇数直线阵列的阵因子表示为:
(8)
式中:N为阵列单元数,N=2M+1;In为单元馈电振幅;u=kdsinφ+α,k=2π/λ,λ为波长,d为阵列单元间距,φ为扫描角,α为相邻阵列单元馈电相位差。
斜率因子K表示为:
(9)
为方便分析,取d=λ/2,α=0,各阵元等幅馈电,上式简化为:
(10)
归一化斜率因子Km表示为:
(11)
取M=10,扫描角φ范围为0~90°,归一化斜率因子Km仿真结果如图3所示。
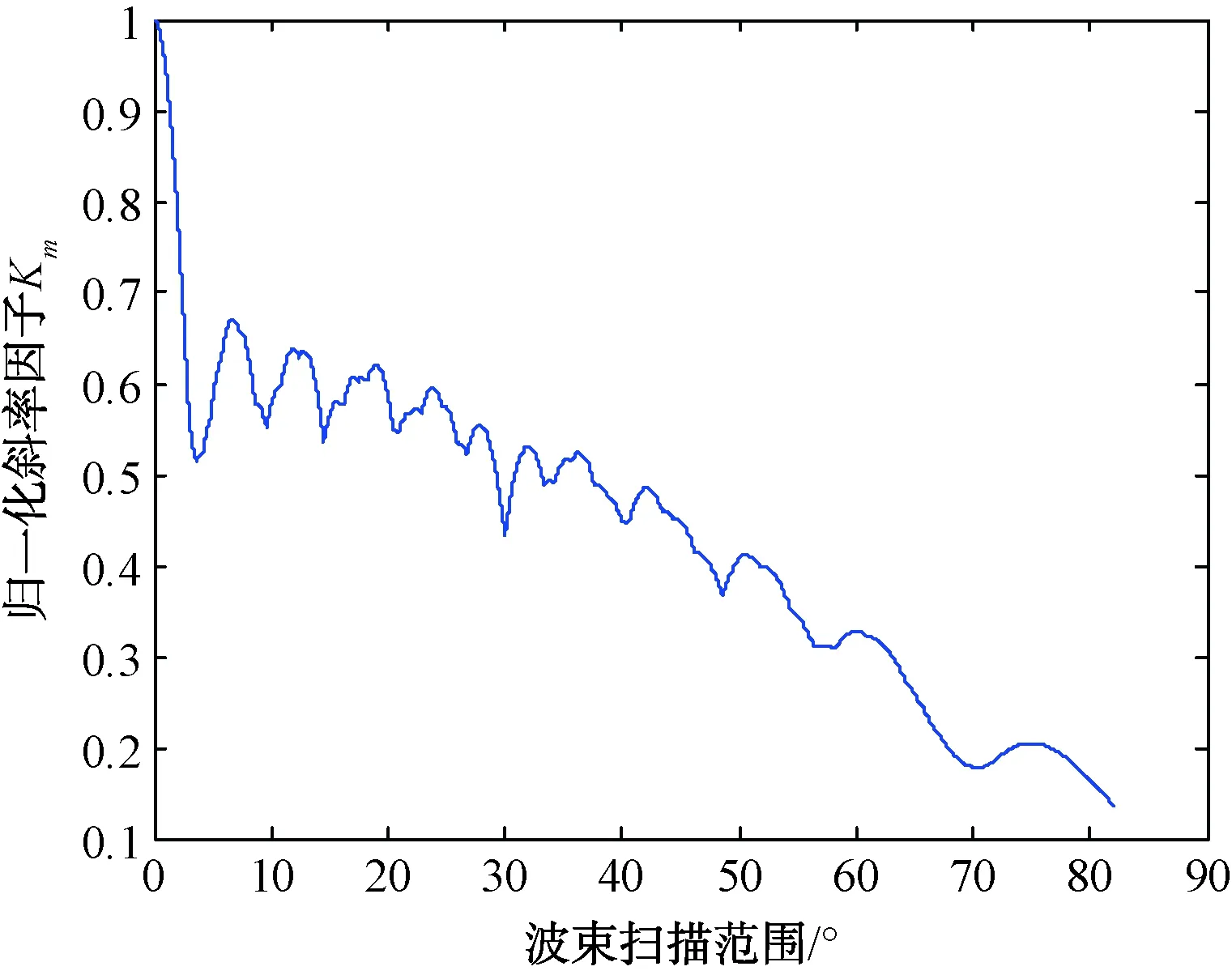
图3 波束扫描时归一化斜率因子Km仿真结果
可见相控阵雷达归一化斜率因子Km变化趋势基本随着波束扫描角φ的增大而减小。
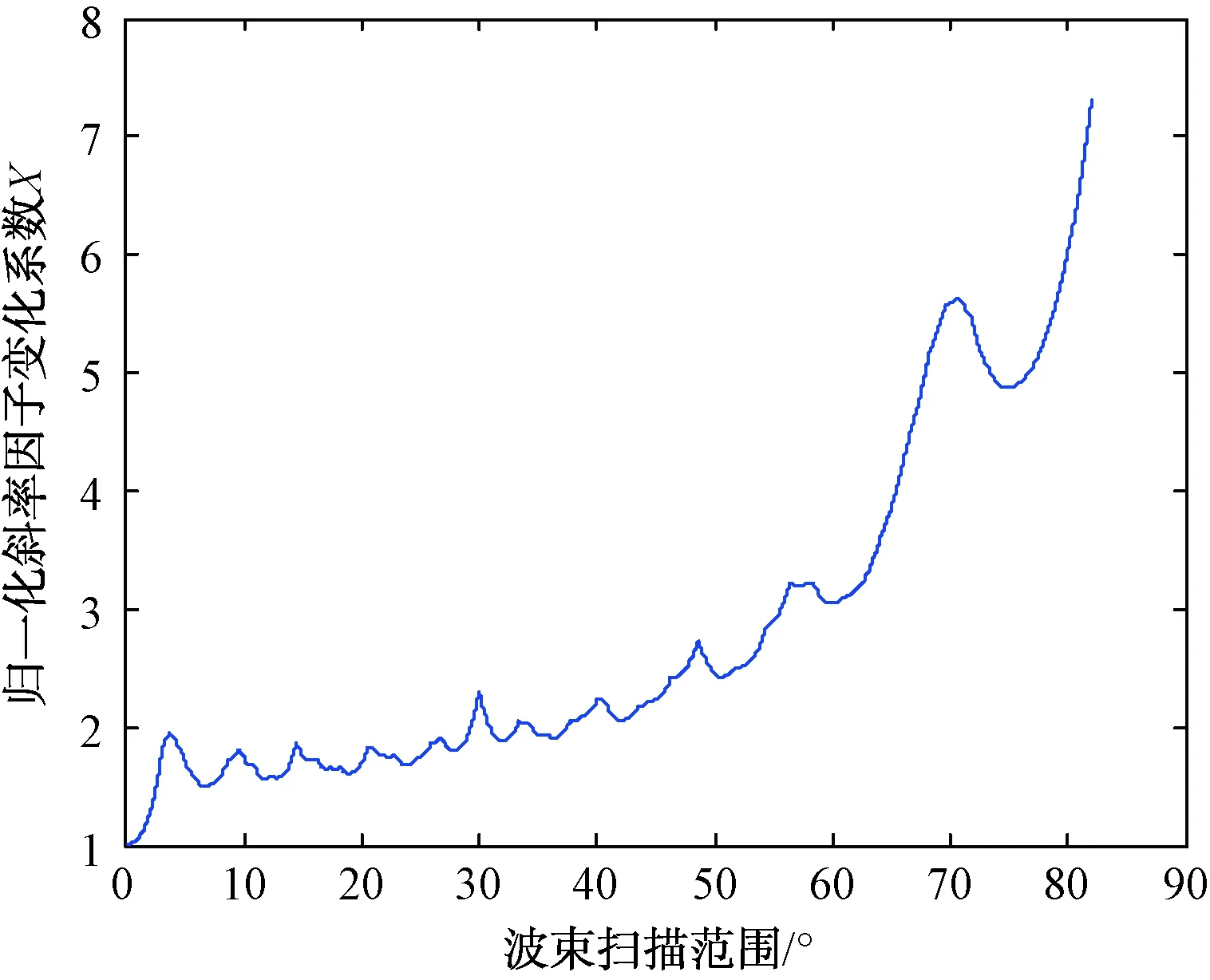
图4 波束扫描时归一化斜率因子变化系数X仿真结果
2.3 波束扫描引入的测角精度影响因子
根据相控阵雷达测角精度分析可知,波束扫描对热噪声误差δ1、接收相位不一致误差δ2、多路径误差δ5的影响因子为Y,Y可表示为:
(12)
影响因子为Y的仿真结果如图5所示。
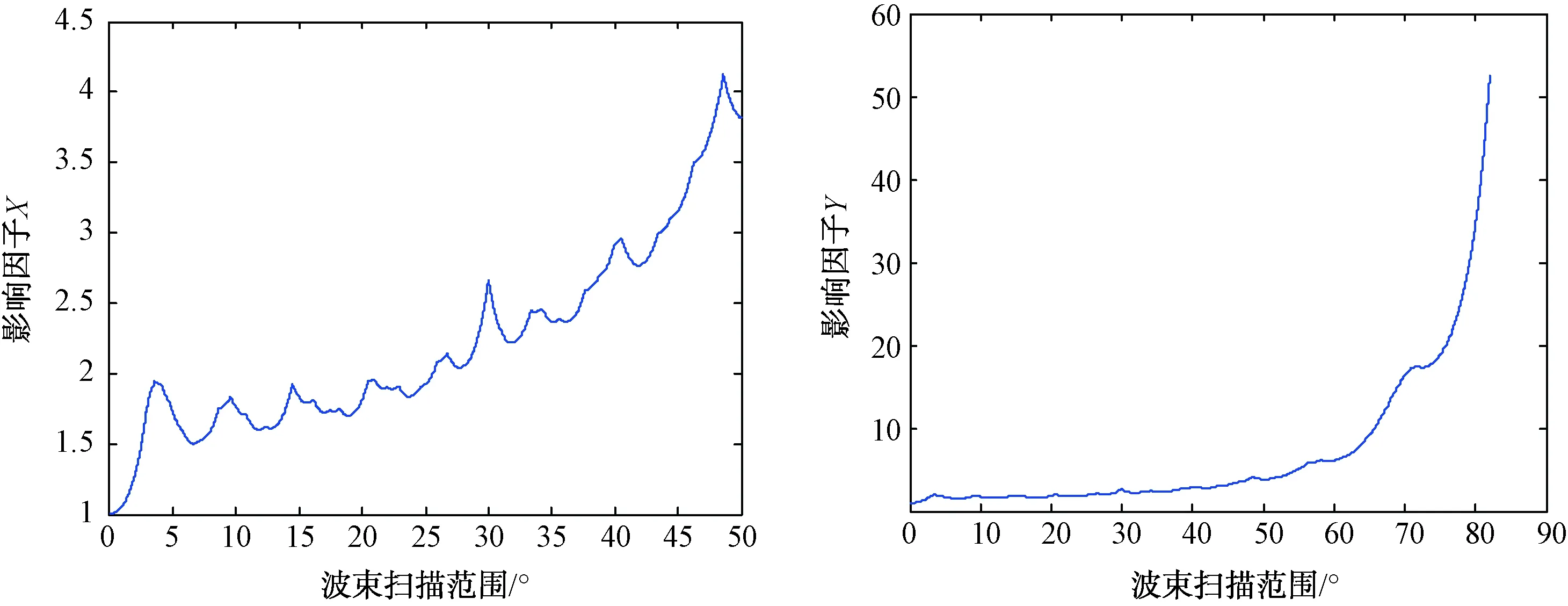
图5 波束扫描时影响因子Y仿真结果
波束扫描对接收幅度不一致误差δ3的影响因子为J、对天线零深δ4的影响因子为X。
波束扫描引起的测角误差δ6表示为:
δ6= (Y-1)(δ1+δ2+δ5)+(J-1)δ3+
(X-1)δ4
(14)
根据波束扫描引起的测角误差公式可以看出,波束扫描对雷达跟踪各项测角误差均产生影响。根据影响因子仿真结果,波束扫描引起的测角误差随着扫描角发生变化。当扫描角超过30°后,引入误差急剧增加。波束扫描引入目标测角误差是雷达跟踪测角误差的重要组成部分,是相控阵雷达扫描范围和测角精度设计的主要影响因素。
3 仿真分析
设定仿真参数:半功率点波束宽度θ为3°;归一化斜率因子Km为1.57;脉冲信噪比S/N为17 dB;信号处理积累点数为32;比较器后的和、差2路相移差Φ为10°;天线误差方向图的零深Gn为25 dB;和差比较器前2路幅度不平衡值KA为0.1 dB;表面反射系数ρ为0.4;和主瓣峰值功率与镜像点差副瓣峰值功率比Gse为20 dB;
相控阵雷达角跟踪精度热噪声误差δ1、接收相位不一致误差δ2、接收幅度不一致误差δ3、天线零深误差δ4、多路径误差δ5计算结果如表1所示。
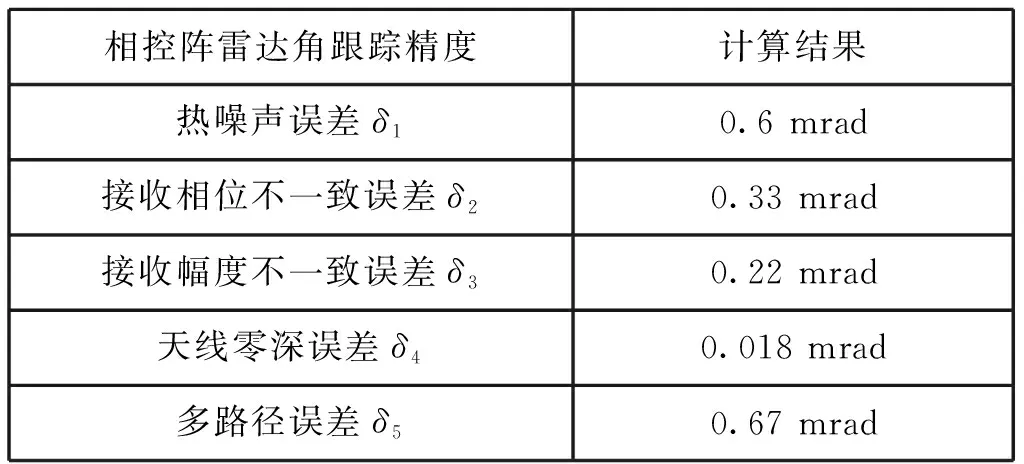
表1 相控阵雷达角跟踪精度(法线方向)
3.1 波束扫描测角误差仿真
对空中目标(不考虑多路径误差),波束扫描引入的测角误差δ6仿真结果如图6所示。
对掠海目标,波束扫描引入的测角误差δ6仿真结果如图7所示。
3.2 相控阵雷达测角总误差仿真
对空中目标(不考虑多路径误差),相控阵雷达测角总误差δ(均方值)仿真结果如图8所示。
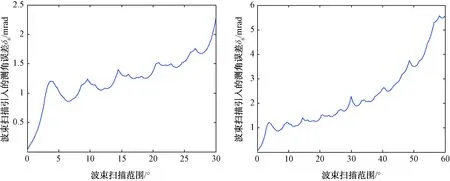
图6 对空中目标波束扫描引入的测角误差仿真结果
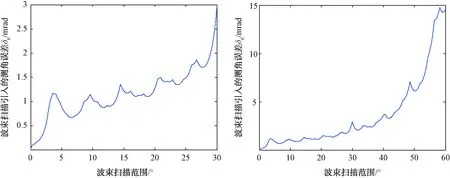
图7 对掠海目标波束扫描引入的测角误差仿真结果
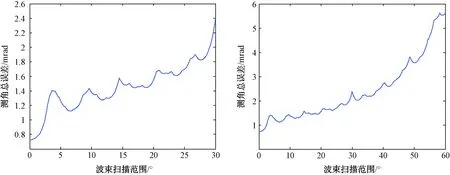
图8 对空中目标测角总误差δ仿真结果
若要求对空中目标雷达跟踪误差为2 mrad,根据上述仿真结果,设计最大扫描角应不超过29°。
对掠海目标,雷达测角总误差δ(均方值)的仿真结果如图9所示。
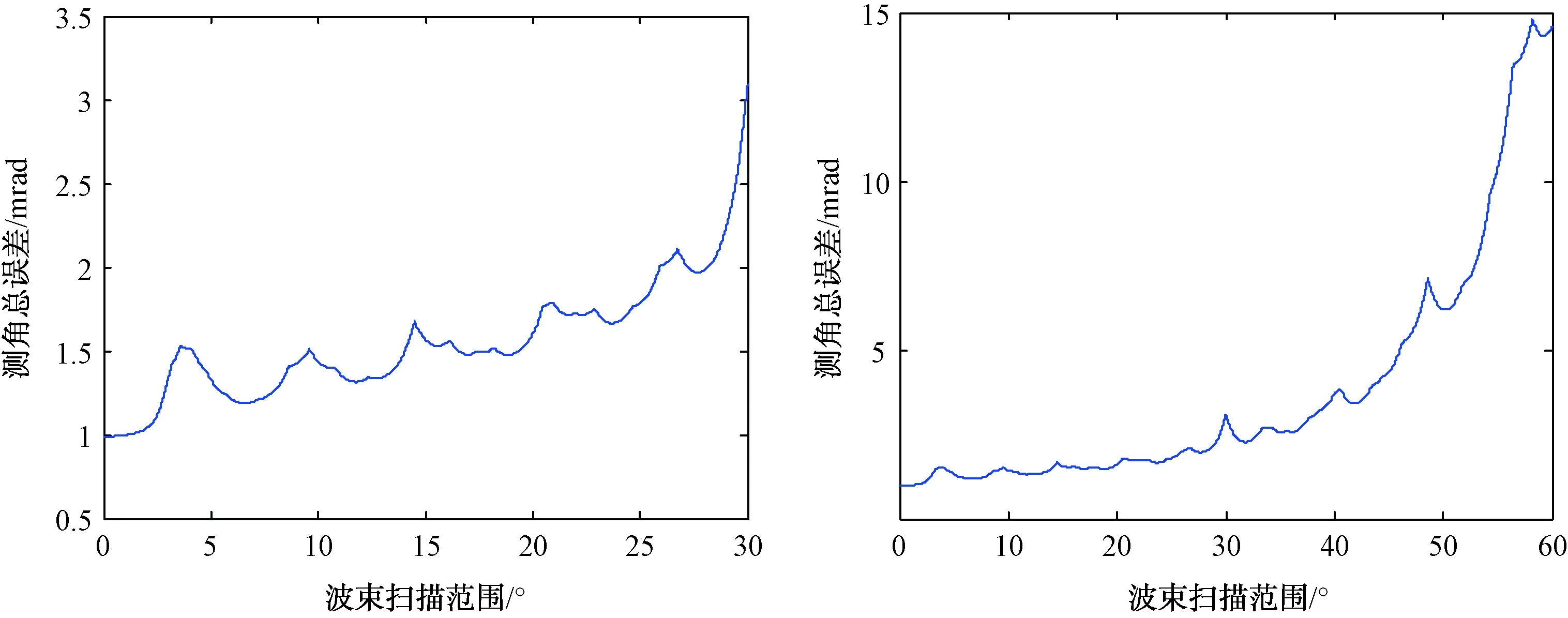
图9 对掠海目标测角总误差δ仿真结果
若要求对掠海目标雷达跟踪误差为3 mrad,根据上述仿真结果,设计最大扫描角应不超过30°。
综合考虑对空中目标和掠海目标的测角精度要求,设计最大波束扫描角应不超过29°。
4 结束语
目标跟踪精度是跟踪雷达的重要指标,本文对相控阵雷达波束扫描引入的目标测角误差进行了计算、仿真和分析,明确了波束扫描范围与目标测角精度的关系,并举例对波束扫描范围进行了计算,为相控阵雷达扫描范围的设计提供参考。