舰载小型无人机集群协同作战的智能控制策略研究
2018-08-28迟凯
迟 凯
(中国电子科技集团公司第二十研究所,陕西 西安 710068)
0 引 言
无人机(UAV)因其良好的机动性、操控性、恶劣环境执行任务的能力及对人员安全极大保障等特点,近年来在军事及民用领域得到长足的发展。在军事方面无人机可以完美地替代有人机去执行4D任务(枯燥乏味、环境恶劣、危险性高、深入敌方)[1],对未来的作战样式、作战理念带来深刻的变化,各国都针对性地指定了军用无人机发展路线图。
美军极其重视小型化无人机集群的技术论证与发展,在未来海战中大量的舰载无人机集群协同作战能够改变现有作战样式,对水面舰艇、舰载有人机造成难以防范的威胁。同时,由于小型无人机成本低廉,饱和攻击高价值目标能够带来巨大的作战效能。美军认为,舰载无人机集群能够对现有航母编队造成巨大的威胁,加强无人机集群技术研发与应用是提升航母作战效能的重要手段。然而目前无人机的操控需要1~3名作战人员在后方控制,大规模的集群协作需要数量庞大的操控人员,这是一个很大的挑战。此外,传统的组网及测控技术也无法满足大规模集群对于海战场末端复杂动态环境的高适应性要求,无法发挥出集群协作的优势。本文提出一种基于智能集群理论的动态协同策略,为指挥舰上极少数作战人员监视控制大量无人机集群提供了一种思路和方法。仿真结果表明,该策略能够提升无人机集群对战场环境的自主适应能力,增强协同效果,从而提升作战效能。
1 无人机集群的特点
无人机的作战样式已逐步从单平台作战向多平台“集群”(Swarm)作战方向发展。一方面,未来战场越来越复杂,单架无人机所能执行的任务能力有限,生存能力受到越来越大的挑战。而多架无人机协同作战,通过相互的能力互补和行动协调,能够实现单架无人机的任务能力扩展以及多无人机系统的整体作战效能提升,完成单架无人机无法完成的任务。另一方面,无人机的自主能力不断发展,将逐步从简单的遥控、程控方式向人机智能融合的交互控制、甚至全自主控制方式发展[2],无人机将具备集群协同执行任务的能力。
美国致力于打造无人机集群,力保军事技术全球领先,通过国防高级研究计划局(DARPA)、海军研究局和众多实验室等组织机构,在无人机集群高风险/高回报的概念验证研究方面成效显著。美国国防部发布的《无人机系统路线图2005-2030》将无人机自主控制等级分为1~10级,并指出“全自主集群”是无人机自主控制的最高等级,预计2025年后无人机将具备全自主集群能力[3]。2016年5月,美空军发布《小型无人机系统飞行规划2016-2036》,从战略层面肯定小型无人机系统的前景和价值,规划中对“蜂群”、“编组”、“忠诚僚机”3种集群作战概念进行了阐述,其中“编组”是人对人,“忠诚僚机”是人对机,“蜂群”是机对机,从侧面印证了无人机集群发展的重要性。
我国无人机技术起步较晚,但发展迅速,以智能集群技术尤为突出。中国电子科技集团公司(CETC)曾分别在2016年和2017年完成了67架和119架固定翼无人机集群飞行试验,刷新了无人机集群飞行数量的新纪录,试验成功地演示了编队起飞、自主集群飞行、分布式广域监视、感知与规避等智能无人机集群技术。
目前中国和美国在智能无人机集群领域处于领先地位。无人机由单平台遥控操作向集群协同应用将对作战模式、作战理论产生极大的影响。要真正实现集群的完全自主控制需要解决集群环境感知与认识、多机协同规划与决策[4]。无人机集群形成协同作战能力,必须满足下面几个特点:
(1)无中心:为保证无人机集群的抗毁顽存能力,集群网络必须无中心,信息处理和决策要进行分布式协同。
(2)自主性:每架UAV需要在本地进行决策,不依赖某一指挥控制节点发送详细的指令。因为指控指令的手法存在不可忽视的时延,在无人机的交战过程中,环境及态势快速变化,任何时延都会降低无人平台的反应能力,从而降低系统效能。
(3)高动态:未来战场的无人机需要对战场空间的环境变化做出快速响应。传统的以预规划的方式进行任务分发和资源管理的方法不能满足战场环境下高动态的需求,需要无人机能够在仅获取局部信息的情况下对环境变化做出决策。
2 智能集群
对于传统的网络而言,当节点数量到达一定数量级时,网络开销会急剧增大,同时网络性能会迅速恶化。依托于构建通信网络对大规模节点控制的方式无法保障实时性与可靠性,近年随着集群理论的发展,采用集群控制策略构建大规模节点控制模型的方法不断得到重视。
智能集群的研究起始于1959年法国生物学家PierrePaul Grasse,研究发现昆虫之间存在高度结构化组织,能够群体协同完成远远超出个体能力的复杂任务。
蚂蚁群体是一种广为人知的高度结构化的社会组织,其觅食行为是一种典型的群集行为。蚂蚁在活动过程中会释放出信息素,其他蚂蚁可以检测出信息素的浓度,并确定自身前进的方向。信息素会随着时间的推移逐渐挥发,蚂蚁走过的路径上信息素浓度会得到加强,从而促使更多蚂蚁选择该路径,形成正反馈过程[5-6]。
鸽群中的个体遵循一种拓扑距离交互的方式,即鸽子自身仅与周围一定数量的个体进行信息交互。研究者指出,鸽群在飞行过程中呈现出一定的层级作用网络,高等级个体起到引领作用,低等级个体的行为会受到高等级个体的影响,这种网络结构使得群体在应对外界刺激或躲避障碍时反应迅速[7]。当飞行轨迹平滑时,个体尽力与其周围邻居的平均方向保持一致,而当出现突然急转弯变向时,个体迅速与高等级个体保持一致。
信息及控制理论研究认为,昆虫及群居动物间广泛存在的协作和控制模式在实际工程中具有很大的应前用景[8]。通过对生物智能集群行为的探索,逐渐涌现了诸多智能集群算法[9],如蚁群算法(ACS)[6]和粒子群优化算法(PSO)[10]。然而目前智能集群算法的复杂度较高,并且算法收敛边界条件较为苛刻,不能适用于小型无人机较低的计算能力及战场环境下高可靠性的要求。
3 基于智能集群的协同策略
舰载小型无人机集群执行的任务类型主要分为抵近侦察和抵近干扰打击。在舰载雷达和岸基、星基情报的综合态势下,小型无人机集群自主进行路径规划,抵近目标后,协同进行多源传感器侦察,或者协同进行灵巧式干扰,还能够以释放弹药或者自爆的形式进行打击。小型无人机平台成本较低,抵近后能够对目标造成极大的防御压力,以较低的成本毁伤高价值目标,提升作战效能。
传统的控制策略是对无人机单平台进行远程操控。需要指挥控制平台预先获取全局的情报信息,设置敌方雷达探测区域规避点,并根据每架无人平台的具体位置进行路径规划、目标指示和任务分配。在水面环境下,敌方雷达往往具有动态性,预先规划不能及时地识别敌方探测区域,同时,根据每架无人机平台位置进行路径规划的策略在大规模的情况下无法应用。这导致传统的控制策略无法指挥引导大规模无人机抵近遂行任务,发挥规模效能。
大规模的无人机集群需要基于生物集群行为,在无人机平台间通过彼此的感知交互、信息传递,进行简单的逻辑处理从而形成协同作战能力。在指控节点少量简洁的控制指令下,完成多样性的复杂任务。
针对舰载无人机的任务特点和传统控制策略的问题,结合智能集群策略,提出了一种应用于大规模小型无人机集群的智能控制策略。与传统控制策略的不同之处是采用了集群的思想,以节点间局部的电子标记来引导行为,达到分布式的协同。
传统的控制策略是尽可能多地搜集全局信息,由某个中枢节点分析处理后,进行任务分解,再根据网络中各个节点的具体位置和状态,进行任务指派和路径规划。而智能集群控制策略是节点获取周围局部节点产生的电子信息,按照简单的行为模式,对局部信息进行反应,同时释放出新的电子信息,周围其他节点获取该节点产生的信息后,迭代进行反应。
每个节点在本地维护一张存储电子信息的表,表中记录有本地任务定义的各信息元素项。节点不需要获取全局信息,并且每个信息元素项强度也随着时间逐渐减弱。但当本地传感器感知到某信息元素项的触发状态时,或者一跳范围内的邻居节点发出某信息元素项信号时,本地节点会强化该信息元素项的强度,并且按照该信息元素项调节本地节点行为。每个节点存储的电子信息的强度变化可用如下公式表达:
S(t+1,p)=E*S(t,p)+r(t,p)+q(t,p)
(1)
式中:p={pi},表示网络中所有节点的集合;s(t,p)表示信息元素强度;r(t,p)表示额外的信息元素强度输入,由新加入网络中的节点产生;q(t,p)表示在t时刻传播到节点p的信息元素强度;E∈(0.1)为信息元素减弱参数;F∈[0,1)为信息元素传播参数;
式(1)描述了在节点p处信息元素强度的变化,第1项为随时间弱化的强度,第2项为新的输入带来的信息元素加强的强度,第3项为邻居节点发送的信息元素带来的强度。
1跳范围内互为邻居的节点,电子信息的传播可用如下公式描述:
(2)
式中:N:p→p表示节点间的邻居关系。
式(2)描述了网络中以节点p为邻居节点的节点,将本地总电子信息强度按照一定比例发送至p,比例取决于发送参数F以及邻居节点数量。
网络中的每个节点按照电子信息的强度定义简单行为,如路径规划按照路径发现过程中各节点标记位置的电子信息强度运动,躲避敌方雷达区域的同时依据梯度向电子信息强度最高的位置汇聚;抵近打击则按照各节点标记的电子信息强度选择武器,并在强度最高的位置开展攻击。
4 仿真和分析
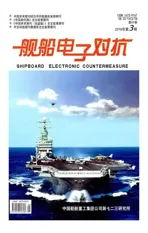
采用智能集群策略进行大规模节点的路径规划,在归一化的指定区域内布设六边形的空间区域,T标记表示目标区域,R标记表示地方雷达区域,在整个仿真区域中随机布设1 000个节点,采用上述策略进行迭代。图1在密集的雷达区域封锁下,网络中的节点通过电子信息标记目标位置和避障位置,能够通过电子信息强度梯度发现可达路径并按照最短原则自主进行路径规划。图2设置了2个目标,节点能够在路径规划后自主选择较近目标优先抵达。图3在3个目标T1、T2、T3中设置了优先级,目标T2优先级高于T1和T3,节点能够在路径规划后,优先抵近目标T2。

图1 寻找可达路径并自主进行路径规划
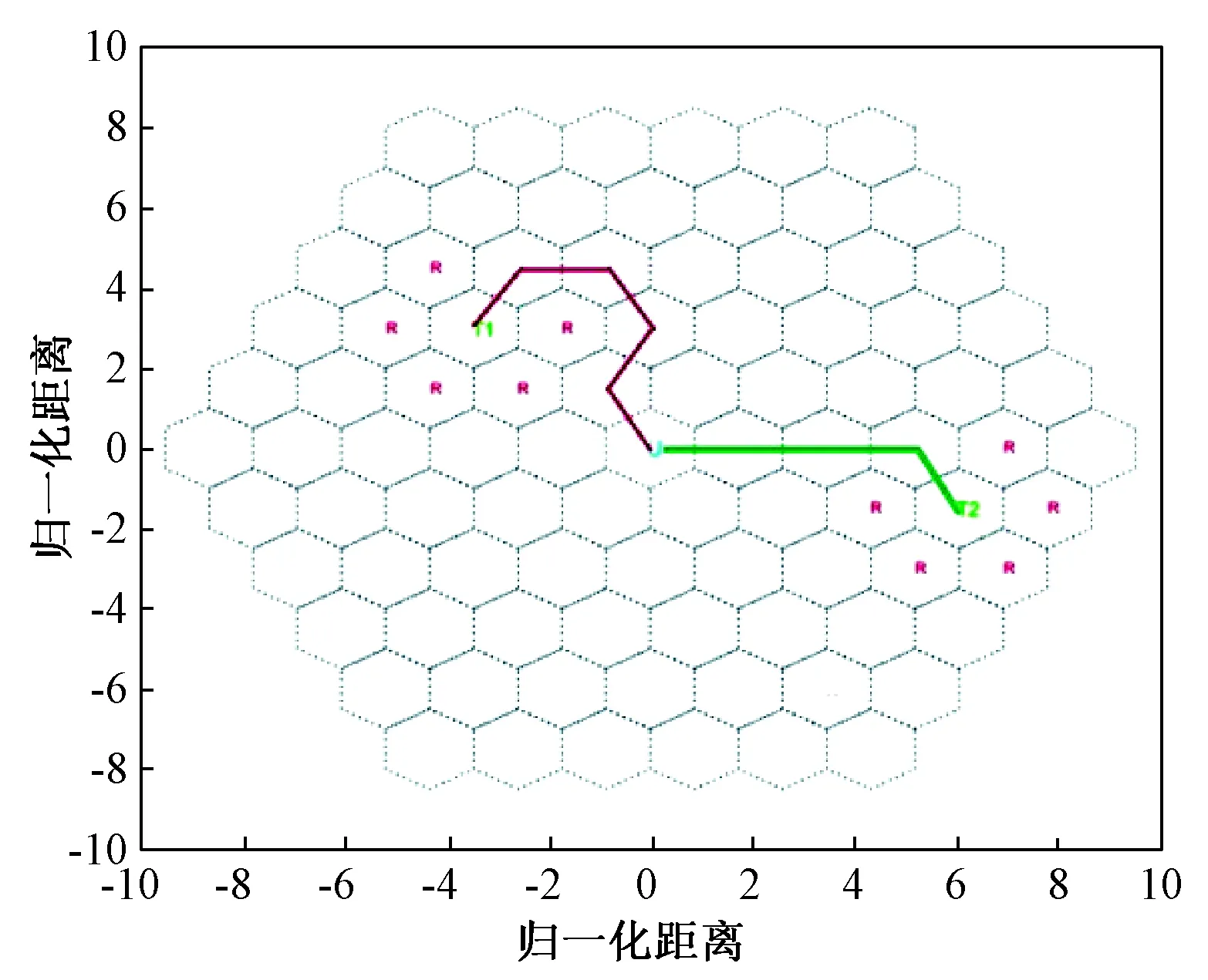
图2 优先选择近距离目标
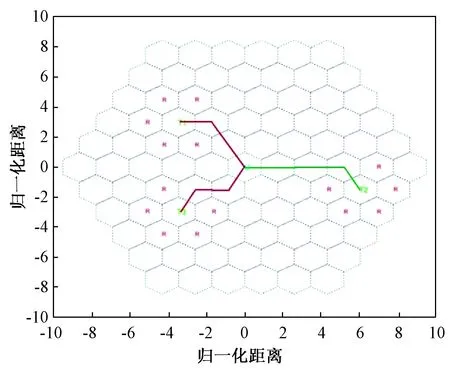
图3 优先选择高优先级目标
以抵近攻击任务为例,假设小型无人机采取抵近后启动战斗部爆炸的方式进行攻击,目标节点数量同无人机节点数量都为100个,同时布设了敌方雷达探测区域,落入该区域的无人机可发出告警信息,但不能继续执行攻击任务。目标节点和雷达探测区域都进行随机移动。case1表示按照预先规划的路径到达指定区域进行攻击;case2表示无人机节点按照预先规划的路径抵达指定区域后,采用智能集群的策略进行自主攻击路径选择;case3表示无人机没有预先规划路线,采用自主路径发现与路径规划的智能集群策略进行抵近攻击。以任务结束后目标剩余节点和无人机剩余节点描述作战效能。如图4所示,case1效能最差;case2无人机到达指定区域后能够自主进行路径规划,进行了更多的攻击,从而剩余数量较case1下降,然而毁伤了更多的目标,case2效能有所提升;case3效能最优,基本达到了1∶1的毁伤率。采用智能集群策略后,无人机集群对动态环境适应能力显著增强,提升了作战效能。
图4 动态环境下协同效能
5 结束语
本文提出一种基于智能集群理论的动态协同策略,为极少数作战人员监视控制大量无人机集群提供了一种思路和方法。仿真结果表明,该策略能够提升无人机集群对战场环境的自主适应能力,增强了协同效果,从而提升了作战效能。