智能循迹吸尘式垃圾桶系统的设计
2018-08-27陈朝诗王艳玲
陈朝诗 王艳玲
摘 要:本设计以STM32单片机为主控制器,设计了一款具有自动吸尘功能的智能垃圾桶,主要包括循迹避障模块、电机驱动模块、红外感应模块、蓝牙通信模块、超声波测距模块、电源开关控制模块等,结合吸尘装置进行设计,不仅可以在人们丢垃圾时自动打开垃圾桶盖,而且可以在复杂的办公场所中进行循迹避障吸尘工作,通过蓝牙无线控制其运行。在使用中可很好地提高办公区域的智能程度,具有很好的开发价值和实用价值。
关键词:STM32单片机;循迹避障;蓝牙;吸尘式垃圾桶
目前,在企业的办公场所的保洁工作主要依靠清洁人员来完成,而且清洁人员主要工作是清理地面的纸屑和灰尘,用到的工具无非就是吸尘器。如果把办公场所一定使用到的垃圾桶和吸尘器结合在一起,进行智能化改进,让它不但可以作为平常的垃圾桶使用,还可以代替清洁人员进行吸尘工作,不仅提高工具的利用率,还能降低人力,对于企业来说,这能很有效地降低人工费支出。再从市场分析,在当前出现很少有一款有这样两用的智能垃圾桶,而且在成本上,本作品的成本相对低廉,更符合办公场所的建设要求,所以应该有着很大的市场。
一、设计方案
本项目在设计思路上分为两条线路,一条是循迹避障和吸尘控制,一条是红外感应加步进电机驱动、灰尘盒及垃圾桶的检测系统和蓝牙无线控制,底座部分是由第一条线路设计的,上面部分是由第二条线路设计的,两条线路通过蓝牙控制连接。
在MCU选择方面采用了STM32系列的芯片,它的性能较51系列芯片更强大,满足项目对主控芯片的性能要求。具体的功能方案实现是:①通过蓝牙控制或者直接手动按键控制垃圾桶进行的循迹吸尘工作,通过循迹模块识别黑线进行循迹,通过避障模块在循迹的时候进行有效地避开线路上的障碍物,避障之后返回到原路线继续运行,吸尘器的工作与电机转动同步;②通过红外感应模块识别人体,实现人们在丢垃圾时自动打开垃圾盖,通过超声波模块和指示灯检测垃圾容量和灰尘容量并提示。
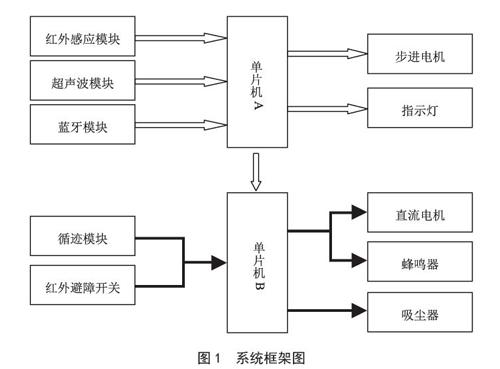
图1 系统框架图
循迹和避障功能根据实际的办公地形进行分析,考虑到各种问题存在的可能,通过算法在程序中实现更好的循迹避障,而且还配有警报设计,如果遇到无法避开的情况可警报提醒。吸尘系统可控,输入功率较低,吸尘效果设计到最佳。上面部分的红外感应翻盖要满足正常的丢垃圾行为,需要调整最佳的红外感应时间和步进电机的转动速度,并进行抗外部干扰处理,实现功能的精准性。在供应电源方面,采用可充电的移动锂电池,输出功率完全满足整个垃圾桶系统的供电要求,并且有足够的续航能力。具体的系统框架如图1。
二、硬件设计
(一)主控芯片
本项目采用的单片机是ST公司的STM32单片机,采用的型号是STM32f103c8t6,是一款有着64K字节的闪存、48个I/O口、2个12位ADC、7个定时器、9个通信接口以及工作频率可达到72MHz的单片机,该单片机的功能比较强大,在成本上相对其他型号的单片机更低点,而且完全满足项目要求,适合本项目的使用。
(二)驱动模块
驱动采用的是12v直流电机,它的负载能力为60KG,满足垃圾重量要求,采用L298N电机驱动模块,L298N芯片具有驱动能力强、发热量低、抗干扰能力强的特点。
(三)传感器模块
本项目采用的传感器有US-016超声波、TCRT5000循迹模块、E18-D80NK红外光电开关、HC-05蓝牙模块等。US-016超声波具有很高的识别精度,识别范围为2cm-300cm,精度达到0.3cm +1%,在项目中采用两个超声波模块加两组指示灯来用于检测垃圾容量和灰尘容量并进行提示。TCRT5000循迹模块的信号处理干净,检测反射距离最小为1mm,可很好地用于短距离识别,项目中用5个TCRT5000循迹模块进行循迹工作,提高精确度。E18-D80NK红外光电开关识别距离较长、抗干扰能力较强,5v供电,因为用于垃圾桶循迹中的避障,所以运用到6个红外开关,前面两个,两侧各有两个,实现有效避障。HC-05蓝牙模块用于通过手机无线控制垃圾桶循迹吸尘工作的启动及停止,方便人们使用。
三、软件设计
(一)循迹避障算法设计
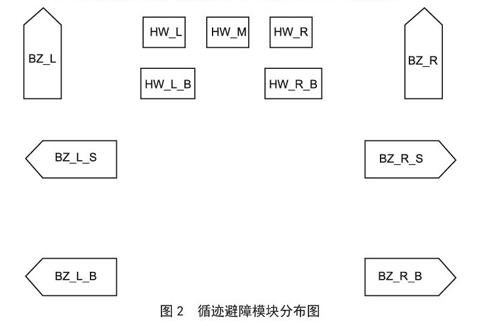
本项目实物底座的循迹避障模块分布图如图2所示:
中间为5个循迹模块,实现循迹功能,HW_L、HW_M、HW_R、HW_L_B、HW_R_B分别代表左、中、右、左后、右后的循迹模块。
垃圾桶运行到终点停止是根据一条横着的黑线进行识别实现,程序的前面有一个直行两秒的设置,在垃圾桶启动吸塵循迹工作前先通过这条停止线,再进行循迹避障的功能。
两边为避障模块,实现循迹工作中的避障功能,BZ_L、BZ_L_S、BZ_L_B、BZ_R、BZ_R_S、BZ_R_B分别代表左前、左边、左后、右前、右边、右后的红外开关,前面两个红外开关触发距离设定为40cm,两侧的四个红外开关触发距离设定为25cm,最低限度地降低可能存在的误判问题。
(二)检测模块的算法设计
在本项目采用超声波模块进行垃圾容量和灰尘容量的检测,通过绿、黄、红指示灯提示,在程序中通过AD转化读取超声波检测到的距离值,根据距离值进行判断容量,表1为具体算法(可根据不同垃圾桶大小设定,本项目用的是小型垃圾桶)。
四、结束语
本项目是主要定位于办公场所,以及娱乐场所、会议场所等,目的是提高日常生活用具的智能化,解放劳动力,降低成本。垃圾桶结合吸尘器是一个很好的设计思路,而且设计出的产品很有市场竞争性,本项目也已经实现构思的功能,只是目前还处于前期研发阶段,后期继续改进,提高稳定性,即可实现产品化。
参考文献:
[1]王苑增.基于ARM Cortex – M3的STM32微控制器实战教程[M].北京:电子工业出版社,2014.
[2]胡跃明.吸尘器机器人的研究现状和展望[J].计算机测量与控制,2002.
[3]朱勇.基于超声波传感器测距的沿边走吸尘器路径规划算法[J].机器人技术与应用,2002.
[4]吴海彬,朱世强,马翔.自主吸尘机器人在非结构性环境下的避障与路径规划[J].机器人,2000.
作者简介:陈朝诗(1995—),男,广东湛江人,本科。
王艳玲(1982—),女,山东淄博人,硕士,副教授,主要研究方向:自动控制。
注:本文系齐鲁理工学院大学生创新创业项目“基于单片机的智能垃圾桶”阶段性研究成果,项目编号201713998008。
(通讯作者:王艳玲)
