长行程机器人地轨的结构分析
2018-08-27王志挺
王志挺
(广州明珞汽车装备有限公司,广东广州510530)
0 引言
机器人地轨又称机器人行走轴、机器人外轴、第七轴,其作用主要是带动工业机器人,使其能在指定路线上进行移动,扩大机器人的作业半径,提高机器人的使用效率。机器人第七轴,即机器人安装在可以移动的基座上通过导轨装置进行直线运动的行走系统装置。采用该线性滑轨可增加作业空间或在机器人作业区移动工件/工具,通常用于搬运、点焊、弧焊等机器人作业。它能确保整条生产线上的生产效率最大化,有了直线导轨,可以进行长距离的移动,作业空间将显著增大。另一项重要优势:第七轴以附加轴的形式工作,采用机器人的控制系统进行控制,因此无需增加额外的控制系统。
地轨由一个高强度的结构件焊接构成并经过精密加工,直线导轨和斜齿轮齿条都经过硬化和研磨处理,标配的APEX行星齿轮箱可搭配多种厂家伺服马达、伺服电机,移动拖链可集成在基本模块上。
1 工作原理
第七轴是一个水平结构的线性移动机器人的单轴单元,如同附件轴一样由机器人控制系统控制。机器人安装在动力滑台的BASE平面上,机器人控制柜通过拖链系统给动力滑台提供电能及控制信号,动力滑台由驱动装置、交流伺服电机及减速机和齿轮通过安装在滑轨底座上的齿条沿直线导轨方向驱动。动力滑台的运动范围由可编程的软件限位开关限制及机械止挡限位加以保护。
2 结构组成
机器人地轨主要由5部分组成:机器人、地轨底座、驱动装置、动力滑台、长行程拖链(图1)。
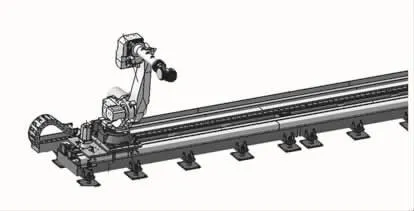
图1 机器人地轨3D示意图
2.1 地轨底座
2.1.1 地轨底座的组成
2.1.1.1 支撑底板
支撑座通过M20化学锚栓固定在地面上,底座通过支撑座上的支撑螺杆和高度调节螺杆调整线性滑轨的高度及水平,调试完成后,底座和支撑座用配焊块焊接固定,防止底座晃动。
2.1.1.2 超程开关
在机器人控制系统软限位失效的情况下,动力滑台触发超程开关后发出信号,强制伺服电机停止。
2.1.1.3 机械限位
在软限位失效的情况下,通过机械硬限位阻止动力滑台冲出滑轨底座。
2.1.1.4 原点校正块
又称“机械原点”,设定机器人动力滑台的位移原点作为电气原点,当电气原点丢失时,通过机械原点找回或校正电气原点(注意:当原点设定或校正完成后,原点校正块必须从其安装支座上拆下,装在支座安装面上,防止动力滑台撞击支座变形导致原点位置偏移)。
2.1.1.5 直线滑轨
通过导轨上的滑块与动力滑台连接,使动力滑台在直线导轨的长度范围内做直线运动。
2.1.1.6 齿条
作为驱动装置的一部分安装在底座上,把电机输出的旋转力矩转化为推力驱动动力滑台做直线运动。
2.1.2 齿条装配注意事项
标准齿条设计有固定的侧隙,装配时需要根据组装距离(公差为H7~H8)进行组装。组装距离a=齿条的啮合高度+齿轮的分度圆半径(图2)。
(1)研磨齿条是安装面经过研磨加工的高精度产品,安装齿条的基面精度低会对产品的性能产生影响。参考图3,将齿条组装在高精度平行度和垂直度的基面(推荐值为10 μm以内)。
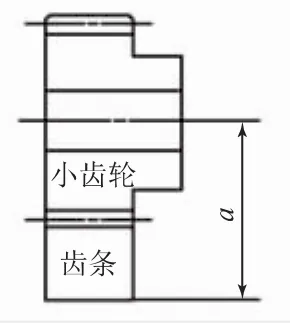
图2 轮齿尺寸配合示意图
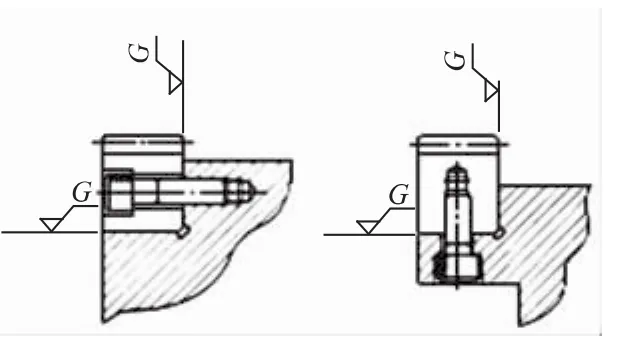
图3 齿条的安装方式
(2)如果齿条没有贴紧固定在基面上,运转中可能会产生移动而引起无法预知的问题。另外,为使紧固螺钉在剪切方向不承受负荷,需同时使用销钉固定齿条。
(3)对于端面经过加工的齿条,端面部的齿距为负公差(-0.4~-0.05 mm)。齿条连接使用时,如果将两根齿条的端面紧贴在一起,连接部的齿距会变小而成为故障的原因。应参考齿条安装步骤,正确组装。
(4)启动中有噪音及振动等异常时,需确认齿轮及组装状态。齿轮防止噪音及振动的对策有高精度、齿面粗糙度、正确的轮齿接触,详细内容可参考KHK齿轮技术资料的《齿轮的噪音及对策》。
(5)为了避免损伤,齿轮都是单独包装。产品由包装盒中取出时,需认真检查,如果发现产品有生锈、刮痕、压痕,应将产品退还代理店更换。
(6)操作处理方法不同,也会造成变形及损坏。特别是长齿条或环形齿轮等容易变形的产品,在操作使用时应谨慎小心。
(7)启动前需确认:轮齿接触是否偏向一端,是否有适当的侧隙(要避免无侧隙使用),有没有足够的润滑。
2.2 驱动装置
2.2.1 伺服电机
伺服电机主要由一个带内置电磁制动器和行程测量系统的电机组成。电磁制动器用于防止动力滑台在停机时移动。电磁制动器在无电流时合上,即衔铁在永久磁铁磁场的作用下被拉向电磁制动器;如果有电流流过电磁制动器,则永久磁铁磁场强度降低,衔铁被释放。伺服电机被固定在齿轮箱的侧面。电机电缆和控制电缆通过插头连接。
2.2.2 减速机
电机转速通过减速机减速后被齿轮传递到齿条上,减速机通过安装板固定在动力滑台上,齿轮按法兰连接方式与减速机安装固定,齿轮箱已加润滑脂。
2.2.3 齿轮调整块
通过调节螺钉移动减速机安装板上的减速机和齿轮,调节齿轮与齿条之间的侧隙,从而保证齿轮能够圆滑顺畅地旋转传动。
2.3 动力滑台
动力滑台用于支承机器人。动力滑台机器人BASE具有一个配备两个定位销的连接面,连接面的布孔图取决于机器人的型号。动力滑台通过滑轨底座直线导轨上的滑块安装板固定连接进行直线运动引导。安装电缆和油气管的拖链系统的移动端与固定在动力滑台上的随动连接器连接。
动力滑台的运动范围由可编程的软件限位开关限制。如超过允许行程,则通过超程触发块滑轨底座上的超程开关和机械限位停止动力滑台的运动。
动力滑台原点位置可通过原点校正组件加以校准,为此配备了专用的原点校正块。
2.4 长行程拖链
2.4.1 长行程拖链的结构
拖链系统由拖链、插头板和一个随动连接器组成。拖链系统用于安装包括机器人、能量供应及介质供应的电缆和管路,拖链内部采用隔片将各条电缆和管路分开,这些电缆和管路是为运行线性滑轨和机器人以及连接的工具而配备的。导向槽在滑轨底座上固定,拖链安放在导向槽中(图4)。拖链固定端在导向槽安装固定,拖链移动端在动力滑台上则通过随动连接器固定。
拖链的长度视动力滑台的行程长度而定。
2.4.2 拖链安装要求及注意事项
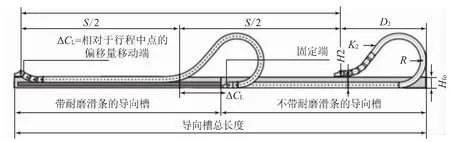
图4 长行程拖链示意图
(1)为达到更大的架空长度,拖链都有一个预应力,在零负载自由状态下呈微微上拱状,其实际安装高度需要放大。带负载状态下允许塌腰的高度最大不超过50 mm,否则拖链后退时会产生向下的切应力,容易导致拖链脱节或者断裂。对于垂直方向上悬挂使用的拖链则使用无预应力。
(2)拖链的弯曲半径R由最大电缆或油气管的外径决定,R一般要等于或大于最大电缆外径的7.5倍或最大油气管外径的10倍,这样才能保证电缆的使用寿命和正常使用。
(3)拖链内管线填充不能超过拖链内腔空间的80%。如果拖链填充过满,运行中拖链将无法达到其最小弯曲半径,弯折处应力集中,受到破坏。
(4)管线填充重量不得超过拖链能承受的最大载荷(具体数值查阅选型样本)。
(5)电缆和介质管排布时要注意重量对称。
(6)电缆和管线周围需要留出一定的空间:圆电缆10%,扁电缆10%,气管5%~10%,水管20%,其他介质管15%~20%。要保证电缆和介质管能够在拖链内自由运动,否则它们将会磨损,缩短使用寿命甚至无法使用。
3 结语
机器人地轨技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃、应用日益广泛的领域。机器人地轨应用情况是一个国家工业自动化水平的重要标志,本文对长行程机器人地轨结构进行了分析,此类地轨适用于机床工件上下料、焊接、装配、喷涂、检验、铸造、锻压、热处理、金属切削加工、搬运、码垛等工作,能够满足工厂自动化生产线的实际需要,地轨的行进采用伺服电机控制,定位精度高。
