一种基于à Trous算法的水下图像增强算法
2018-08-25黄允浒韩燕吐尔洪江阿布都克力木
黄允浒,韩燕,吐尔洪江·阿布都克力木
(1.新疆师范大学数学科学学院,新疆 乌鲁木齐 830017;2.新疆和静县第九小学新疆 和静841304)
由于水体本身性质,光学特性和悬浮体等的存在,造成水下图像对比度差,噪声大等缺陷。然而这些缺陷影响着水下图像的后期处理,如图像分割、特征提取以及目标识别等,这也使得水下图像增强也越来越受到重视[1]。
现有的水下图像增强的方法主要有变换域增强,空间域增强[2-3]。其中基于变换域增强方法主要基于多尺度分析,如傅里叶变换,小波变换,二进小波变换[4],Contourlet变换[5],非下采样Contourlet(Nonsubsampled Contourlet Transform ,NSCT)变换[6-7]等,而傅里叶变换在变换时会造成信号细节损失;小波变换只能描述点奇异性,往往使图像边缘变得粗糙;二进小波变换在分解和重构时未进行采样操作,因此图像(信号)在二进小波域表达是及其冗余的,平移不变性在图像去噪,增强等众多领域的应用中有着重要的意义,它保证了图像原有的重要信息的位置在二进小波域中不会有很大的偏移,不会使图像在预处理时而平滑掉某些重要信息,部分系数扰动不会引起重构图像的严重失真,可以有效避免由于非线性变换引起的视觉形变;NSCT克服了Contourlet变换由于缺少平移不变性,有效降低了信号在重构时引起的伪吉布斯振荡问题,且在保留图像细节信息同时能达到良好去噪效果,但其缺点是运算量大的缺点,相比之下,二进小波变换数学结构较为简单,运算复杂度更低,能提高算法的时间效率,适用于图像增强,去噪和融合领域。
基于空间域增强方法是直接对图像的灰度值进行处理。利用本文方法对大量水下图像进行实验分析,为避免主观性和经验主义带来的局限性,根据主观效果及清晰度,信噪比(PSNR)和绝对均值差(MAE)作为对水下图像的客观评价方式,并与目前图像处理中最具代表性的多尺度增强方法对比,实验结果表明,本文提出的方法在主观上能有效改善水下图像的视觉效果,客观指标中,图像的清晰度,信噪比都有大幅提升。
1 算法原理与分析
二进小波变换是对连续小波变换的频域抽样。因此,它既弥补了连续小波变换在处理图像时所存在的不足,又继承了其平移不变性表示的优点,致使完备的子带系数适用于图像增强。由于该变换不需要严格的子采样,因此可以保留图像的细节信息,从而避免伪像和空间变形。二进小波平移不变性和各尺度上系数相关性,不会使图像在预处理时而平滑掉某些重要信息,部分系数扰动不会引起重构图像的严重失真,有效改善图增强过程中噪声放大,对比度差的问题。为了提高该算法的时间效率,本文采用二进小波变换快速算法-à Trous算法[8-9]。该算法是在Mallat提出的二进小波变换基础上的改进,其基本思想并没有发生改变,由于能描述信号的局部特征,在一定程度上克服了“Mallat小波变换单纯增强细节信息,存在噪声放大等问题”。其基本思想是把信号或图像的高低频信息分离,将其分解为不同频率通道上的近似信号和小波平面。
通过利用二进小波变换域内数据表达很大冗余性,便于对每个尺度下的细节和概貌进行频谱分析,可以有效避免由于非线性变换在边缘不连续所引起的伪吉布斯现象,在相同误判概率下,二进小波变换可改变图像重建效果,可以降低图像在重建过程中产生的人工噪声。相比于其他去噪算法,二进小波变换的图像去噪方法对噪声水平有很强的稳定性[9]。因此,现将一维à Trous算法进行推广并将其应用于图像的变换和反变换过程中,本文利用二进小波来处理水下图像,以求获得更高质量图像。
在城市规划中,不仅要考虑城市布局问题,还要考虑城市规模。首先应在灾害评估的基础上,做好防灾规划,然后进行城市发展的其他规划编制。
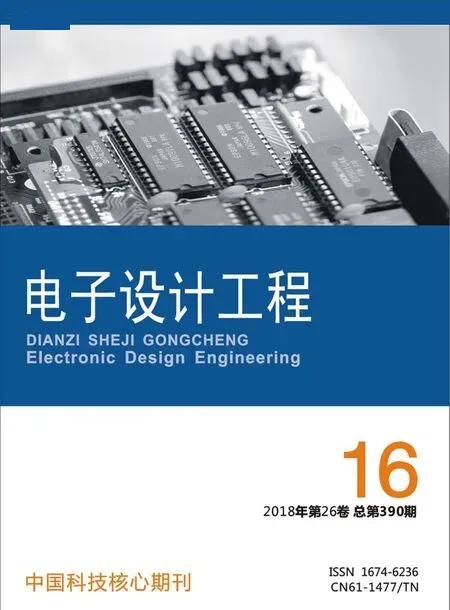
文中选取r=2,m=1时具有线性相位,紧支撑,高阶消失矩的B-样条二进小波滤波器作为初始滤波器作为初始滤波器。基于二进提升方案,通过调整提升参数的形式,能够构造出具有更高阶消失矩的提升二进小波滤波器[8-9]。初始滤波器尺度函数和小波以及提升二进小波对应的尺度函数和小波分别如图1和图2所示。
2 算法实现
2.1 二进小波域低频子带系数处理
噪声具有很大随机性,在二进小波域中不具有固定的几何结构特征,经二进小波变换产生的低频子带中几乎不含噪声信息,它就像是源图像的缩略图[10],包含了原始输入图像边缘亮度等关键信息,它对原始图像最大影响是对比度,为了有效改善图像亮度分布均匀性,用线性拉伸方式提高图像整体对比度,增加图像的层次感。采用如下线性映射方式,将低频子带系数映射到[0,255]区间内。

其次利用式(1)将处理后的系数映射到[xmin,xmax]区间内,式中xmin与xmax分别为低频系数中的最小值与最大值,f′(i,j)为线性变换的结果。
2.2 二进小波域高频子带抑噪处理
图像经二进小波变换后,高频子带系数包含图像中大量的细节信息和噪声,对高频子带系数调整目的是去除噪声,增强弱边缘和细节信息[11]。本文选取如下连续非线性函数H(x)来调整高频子带系数

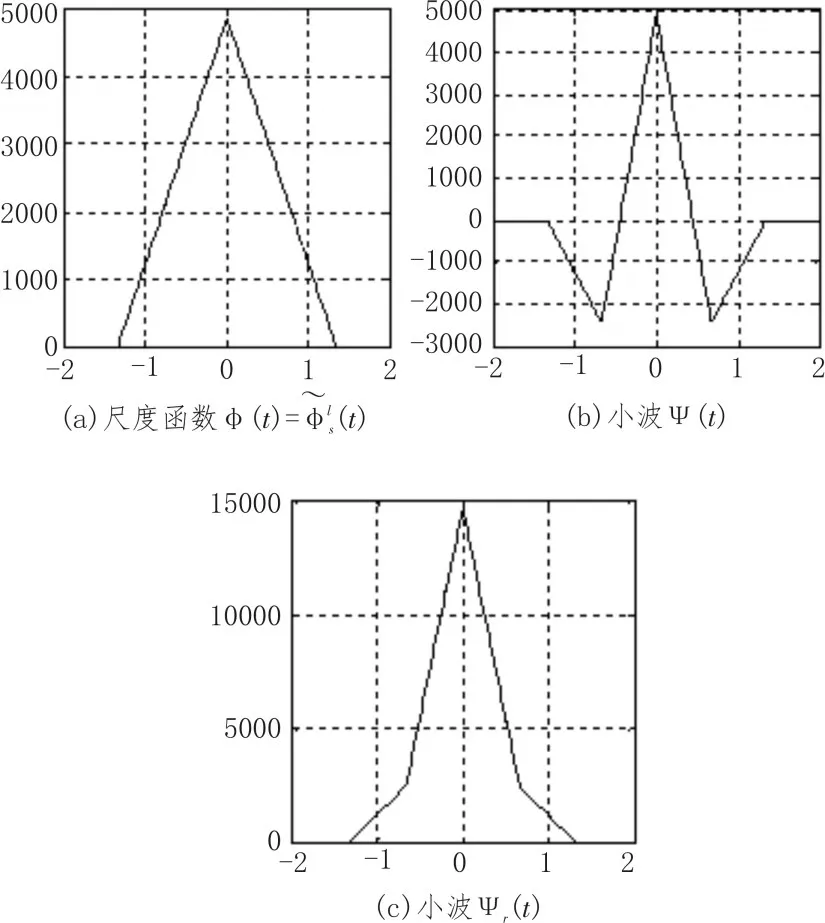
图1 尺度函数与小波(ϕ(t)='s(t),ψ(t),ψr(t))的图像
图2 提升二进小波尺度函数和小波
其中Ni为i尺度子带大小,Li的值是与尺度相关的最重要参数,b2为控制着非线性增强函数的形状参数,控制着曲线斜率的变化。为保证Hij中的大部分系数能得到增强,其增益倍数必须满足大于1,因此参数b2由下式自适应确定,即:


改进的阈值公式可表示为:

λ为第k尺度,s子带内阈值的改正因子,可以表示为,其中和分别表示为二进小波域内第k尺度第s子带系数绝对值的平均值和第k尺度的所有子带系数绝对值的平均值[12-13]。整体系数较小的子带通过改正因子使得阈值因子也相对较小,能够保留更多的系数,而对于较大的子带系数通过增大阈值以抑制更多的噪声,减少重构图像的严重失真,提高图像的重构质量。
与分别为噪声方差和信号方差,取值分别由下式得到:
根据上述分析,高频子带系数可按下式进行调整
3 改进的模糊对比度
经过二进小波反变换得到水下重构图像,基本上已经除去了噪声的影响,但细节和对比度有待进一步提升。但还是存在对比度较低,边缘不够清晰。因此可以直接利用模糊对比度增强来处理二进小波反变换后的图像,这样既能提高水下图像整体对比度又能避免噪声放大。
1981年,Pal和King等人首次在将模糊理论应用于图像增强中[14],并取得良好的效果,究其原因在于:图像的不确定性是由于图像模糊性导致的。因此,可以把图像的灰度认为是一模糊概念而采取模糊处理的技术[15-16]。一幅大小为M×N,具有[0,L-1]个灰度级的水下图像可以作为一个模糊点集看待:

xij表示图像在(i,j)处的灰度值,μi,j/xi,j表示xij相对于某种特征μij的隶属度。文献[15]给出了归一化模糊对比度概念:
其中为3×3窗口的去心领域的均值,即

本文选用线性隶属度函数将图像由二进小波域变换到模糊特征平面:

L表示水下图像的灰度级,模糊对比度改进公式如式所示

式中β为微调因子,文中取β=0.4,为适应不同类型图像的处理,一般β取值为[0.3,0.5],这样做使得Fe有了更明确的定义:即像素点xij隶属度与其领域均值隶属度之差的绝对值相对于像素点灰度均值的隶属度的比值。
对Fe进行非线性变换Fe′=ψ(Fe),ψ(Fc)为一凸函数,且使得ψ(0)=0,ψ(1)=1,ψ(x)≥0.本文选取增强函数定义如下:

改进的隶属度函为:

将隶属度函数从模糊域转回二进小波域

4 本文算法实现流程
图像增强算法按如下步骤进行:
1)对输入水下图像进行直方图均衡化,以提高图像整体对比度;
2)取r=2,m=1的B-样条二进小波滤波器作为二进小波分解与重构基,按文献[8]中的(1)式~(4)式对直方图均衡化的水下图像进行二进小波变换,得到一个低频子带系数和多个高频子带系数;
3)通过(1)式对低频子带系数进行线性拉伸提高图像整体对比度;按照(2)式~(6)式对不同子带的高频系数进行Bayes阈值估计和非线性增益调整,得到对比度增强和噪声抑制的图像;
4)对低频子带系数和高频子带系数进行二进小波反变换,得到的图像按照(9)式~(12)式进行模糊对比度增强。
5)通过(13)式将图像从模糊域变换回二进小波域,得到增强后的水下图像。
5 实验结果与分析
为了检验本文算法对于水下图像的增强效果,选取纹理信息较为丰富的图像,大小分别为512像素×512像素的淡水鱼图像,并截取其中大小为256像素×256像素的潜水员水下作业图像的一部分作为测试样本,实验中采用的滤波器为T.Abdukirim构造的二进小波滤波器[8-9],本文选取具有紧支撑,对称性和高阶消失矩特点的B-样条二进小波滤波器(r=2,m=1)作为二进小波分解和重构的初始基。同时将本文方法与文献[6,11,18]的方法进行比较,并分别从客观和主观上分析提出的算法对性能进行评估。
因为仿真实验过程中,不同滤波器的选取,参数的选取和分解层数的确定,都直接影响到图像的视觉效果,分解层数不宜过多,否则图像会由于失去较多高频成分而模糊,所以文章对基于非下采样Contourlet变换[6](NSCT)分解均为3层分解。通过主观和客观方式来比较各种算法的增强效果,主观评价主要通过视觉方式对比各种算法增强效果,选取清晰度、均值、绝对均值差(MAE)作为对水下图像的客观评价方式。清晰度也称平均梯度,它反映图像的纹理特征,其值越大说明图像越清晰;均值反映图像的平均亮度,亮度适中(一般在128附近),表明视觉效果良好[21];信噪比能客观反映出各算法的抗噪性能;绝对均值差反映图像对比度大小,其值越小表示图像的整体对比度越好。所有方法的实现是基于Matlab2010a实验平台,硬件设备为 Intel(R)Core(TM)i5 CPU2@2GHz/2GB内存,PC机。参数设置如下:基于NSCT变换中,选用非下采样塔形‘maxflat’滤波器进行尺度分解,非下采样方向滤波器组选用‘dmaxflat7’,所对应的方向数目分别为 8,16,16。多尺度Retinex算法选取3个尺度,尺度N取3,标准差σk分别取值为25,73,87,权重都为1/3。算法增强效果如图3,图4所示。
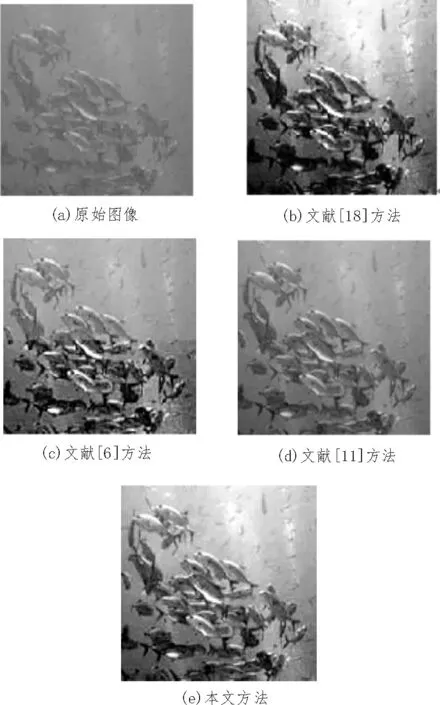
图3 淡水鱼图像增强效果比较
从图3和图4分别为淡水鱼图像,潜水员水下作业图像采用不同增强方法进行增强处理的效果图。由增强结果可以看出,原水下图像整体偏暗,对比度差和细节模糊。增强结果可以发现,文献[6],文献[11]和文献[18]方法均不同程度提升了图像的对比度,图像细节、纹理信息进一步得到改善。其中文献[11]方法对部分细节描述不足,图像的纹理细节和总体对比度没有明显提高;文献[6]方法提升了图像的可读性、层次感更好,但并未显著提高图像对比度;文献[18]增强方法处理后,细节和纹理信息描述不足,出现过度增强,使原本暗的地方更暗,亮的地方更亮,如潜水员水下作业图像的细节没有明显改善。本文方法获得了最佳的视觉效果,较好地呈现淡水鱼,潜水员水下作业图像的纹理和细节信息,有效突出水下图像的阴影和背景部分,在有效提升对比度同时,能够对淡水鱼图像,潜水员水下作业图像的鱼群和海底生物进行清晰的描述。
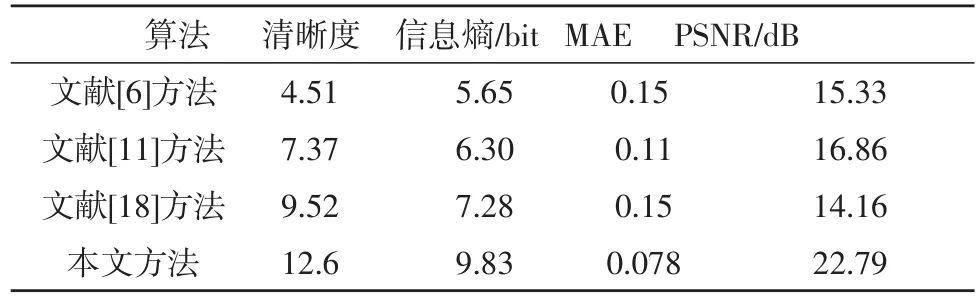
表1 对应图3的客观评价标准
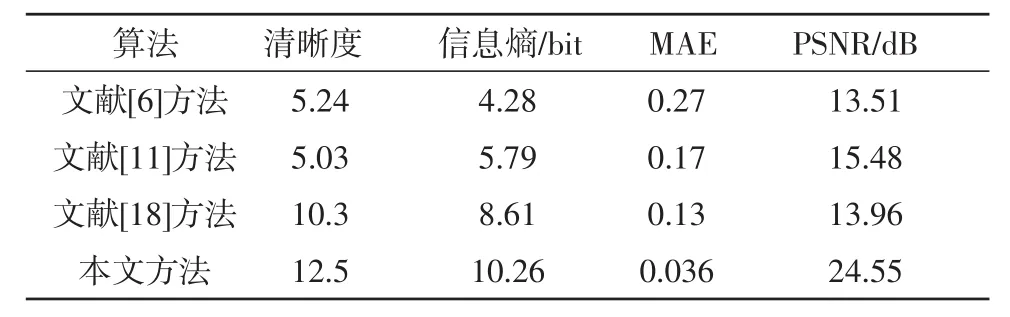
表2 对应图4的客观评价标准
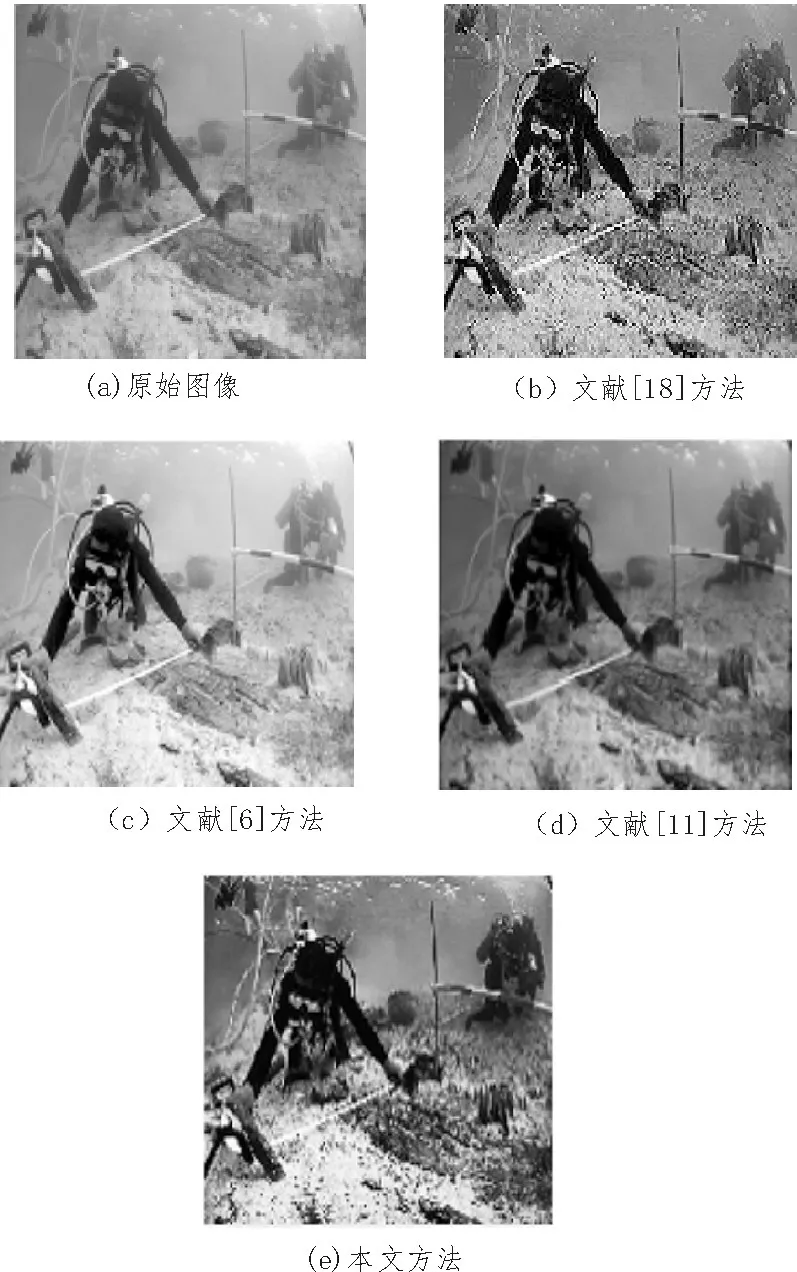
图4 潜水员水下作业图像增强效果比较
从视觉效果来分析实验有一定局限性,带有主观性和经验主义,然而在实际应用中水下图像包含着丰富的空间高频分量和地貌地形等细节信息。因此表1,表2给出了图3和图4的客观评价标准,表1,表2的数据结果客观上说明了各个方法的差别,文献[18]方法增强后的水下图像的清晰度和灰度平均值与本文方法接近,但PSNR明显低于本文方法。文章提出的增强方法在绝对均值差(MAE)都低于其它算法,说明本文方法比其他方法对比度更高。
综上可知本文的算法由于其他增强算法,取决于以下3个方面,一方面充分利用二进小波平移不变性和各尺度上系数相关性,选择具有紧支撑,对称性和高阶消失矩特点的B-样条二进小波滤波器作为二进小波变变换的分解和重构基,不会使图像在预处理时而平滑掉某些重要信息,部分系数扰动不会引起重构图像的严重失真,且数据表达有很大冗余性,便于对每个尺度下的细节和概貌进行频谱分析,有效避免了由于非线性变换在边缘不连续所引起的伪吉布斯现象,其次对高频子带信息进行Bayes阈值估计和非线性增益调整,有效增强水下图像对比度和改善图增强过程中噪声放大,对比度差的问题;另一方面对重构的子带系数通过模糊对比度处理增强水下图像边缘细节,提高图像对比度的同时,更好缓解了水下图像边缘处引入噪声与水下图像模糊间的矛盾。
6 结束语
提出一种基于à Trous算法的水下图像模糊集增强算法。该方法利用二进小波变换,模糊对比度增强的特点,增强图像边缘细节,提高图像对比度的同时,更好缓解了图像边缘处引入噪声与图像模糊间的矛盾,利用改进的带可调因子的Bayes阈值去噪法对高频子带系数抑噪处理,最大程度滤除由于图像本身的噪声和变化过程可能产生的噪声,并通过模糊对比度增强进一步提高图像全局对比度,可以在图像失真和噪声放大中寻找到平衡点。与目前图像处理中最具代表性的多尺度增强方法:二进小波变换,NSCT变换等相比。实验结果表明,本文方法对水下图像增强在主观上能使图像纹理细节信息更突出,对比度明显提高,视觉效果更好,客观上图像的清晰度和信噪比都有很大的提升。